Изобретение относится к электроприводам глубиннонасосных установок, в частности к устройствам для регулирования частоты вращения двигателя станка-качалки, и может быть использов.ано в нефтяной промышленности при глубиннонасосной эксплуатации нефтяных скважин.
При глубиннонасосной эксплуатации нефтяных скважин работа скважинного насоса сопровождается износом плунжера, втулок и клапанов, в результате чего производительность насоса непрерывно снижается и приводит к частой остановке скважин для подземного ремонта, а следовательно, к потери в добыче нефти.
В связи с этим применяются различные виды регулирующих устройств, увеличивающих число качаний станкакачалки (частоту вргицения его двигателя) по мере изнрса насоса и тем самым способствующих осуществлению поддержания производительности насоса в течение всего межремонтного периода на уровне производительности, нового насоса.
Износ насоса и, следовательно, снижение его производительности отражается на изменении динамического уровня жидкости в скважине и соответственно на изменении фор1«ы динамогргцлмы. Автоматическое непрерывное поддержание постоянства подачи насоса основан на поддержании в скважине постоянного динамического уровня.
Регулирукяцие устройства, реагируя на изменение динамического уровня жидкости в скважине, а следовательно, и на изменение формы динамограм ы, выдают при исчезновении незаполнения насоса импульс на увеличение числа качаний станка-качалки
Известно устройство для регулирования частоты вращения двигателя станка-качгшки, содержащее регулируемый привод с микродвигателем системы управления двигателем станкакачсшки, установленный на валу кривошипа последнего датчик положения и датчик усилия. Контакты датчиков положения и усилия последовательно включаются в одну и ту же электрическую цепь регулируемого привода станка-качалки.
Сигнаш на увеличение числа качаний станка-качалки вццается при исчезновении незагголнения jiacoca вследствие одновременногЪ закв кания контактов датчиков, что происходит при повышении динамического уровня, следовательно при изменении форма граммы.
Контакты датчиков регулируются таким образом, чтобы их одновременное замыкание происходило при исчезновении незаполнения насоса.
Для этого контакты датчика положения замыкаются в начале хода точк-и подвеса штанг вниз и находятся в замкнутом положении в течение определенного угла поворота кривошипа, чему соответствует уставка датчика S .
Датчик усилия настраивается таким образом, чтобы его контакты замыкались при уменьшении нагрузки в точке подвеса штанг ниже величины F.
В режиме незаполнения насоса, в момент замыкания контакта датчика положения, 1 онтакт датчика усилия разомкнут. При исчезновении незаполнения нагрузка в точке подвеса штанг в этот момент уменьшается до установленной величины F,, вследствие чего контакты обоих датчиков окажутся замкнутыми одновременно, чем достигается подача импульса на увеличсенИе числа качаний. Величина Sy и Р, устанавливается заранее, конкретно для каждого случая, исходя из режима откачки данной скважины.
Колебания динёмического уровня, определяемые по форме изменения диHaMorpaMvEd, сюгистрируются указанными датчиками, которые через ячейку упфавленйя управляют работой сервопривода вариатора, изменяющего числа качаний балансира (скорость вршцения кривошипа)
Недостатки известного устройства для регулирования частоты вращения двигателя станка-качалки состоят в неудобстве монтажа и регулирования уставок датчиков, устанавливаемых в труднодостушшх местах, содержание в них контактных устройств, снижакзцих надежность их работы, а также в трудностях, возникающих при изменении устбвок датчиков, так как при этом необходимо остановить глубиннонасосную установку. Все это не позволяет применить известное устройство на промыслс х в цепя: .поддержания постоянства добычи нефти.
Цель изобретения увеличение мец|фемонтного периода работы сквгикинного насоба и повыоеиие производитель ности насосной установки.
I Цель достигается тем, что устрой стао для регулирования частоты вращения двигателя станка-качалки, сфдержацее регулируемьШ привод с микродвигателем системы управления двигателе ;: станка-качалки, установленный на валу кривошипа последнего датчик положения и датчик усилия, сна бжено уэ-. лами фиксгщии положения и усилия и логическим злементрм И, подключенным кмикродвигателю систекол управления двигателем станка-качалки, а выходы датчиков положения и усилия связаны соответственно.с входами узлов фиксации положения и усилия, при эЮм 5 выходы узлов фиксации положения и
усилия соединены с входами логичес кого элемента И.
Датчик положения выполнен в виде . синусно-косинусного поворотного трансформатора.
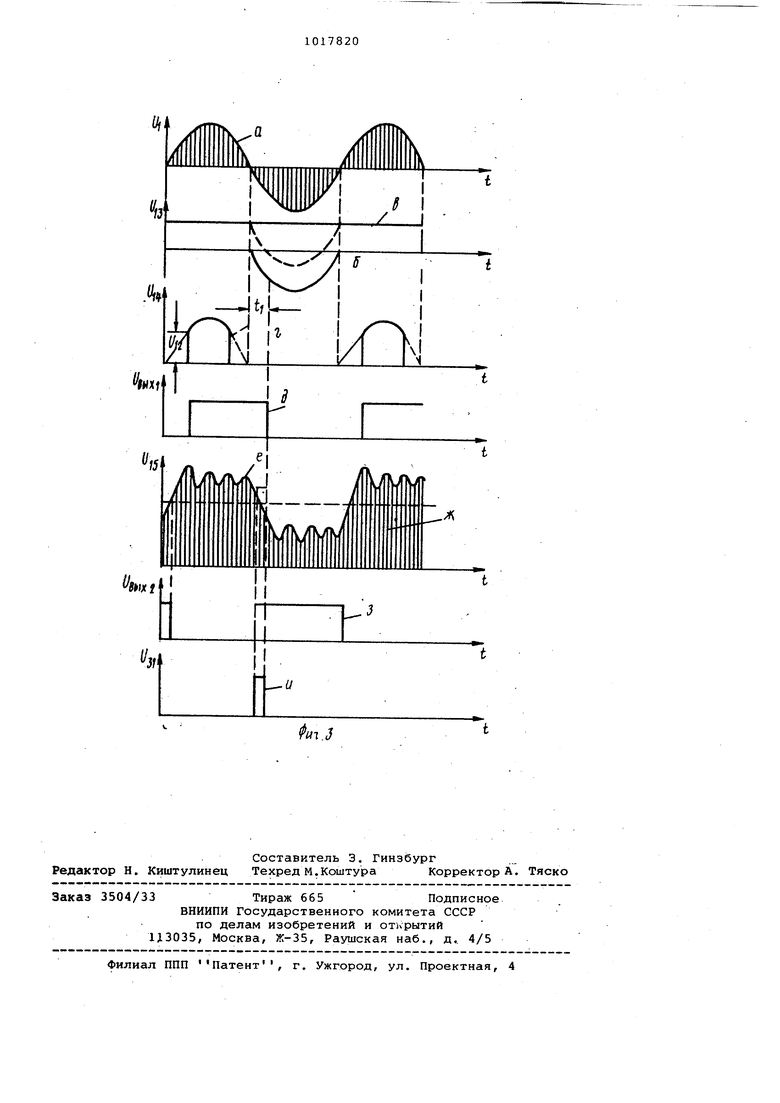
Датчик усилия выполнен в виде дифференциальирго траисформатор а. . На фиг. 1 представлена теоретическая динамограмма работы глубиннонасосной установки; на фиг. 2 схема устройства для регулирования частоты вращения двигателя станкакачалки глубйннонасосной установки; на фиг. 3 - диаграмкы .напряжений, пояснякивде принцип работы устройства.
Устройство для регулирования частоты вращений двигателя станка-качалки содержит регулируекий привод 1 с микродвигателем 2 систели 3 управления двигателем 4 станка-качалки (-не обозначен) , установленный на валу кривошипа последнего датчик 5 положения, выполиенный в виде синусно-косинусного поворотного трансформатора б и датчик 7 усилия, выполненный в виде дифференциального трансформатора 8. Устройство снабжено узлами фиксгщии положения 9 и усилия ib и логическим элементом И 11, подключенным к микродвигателю 2 системы 3 управления двигателем 4 станка-качалки. Выходы датчиков 5 положения, выполненного в виде синусно-косинусного поворотного трансформатора 6, и датчика усилия 7, выполненного в виде дифференциального трайсформатора 8, связаны соответ ственно со входами узлов фиксация положения 9 и усилия 10, при этом выходы узлов фиксации положения 9 и усилия 10 соединены со входами логического элемента И 11.
Узел 9 фиксации положения состоит из делителя 12 напряжения, собранного на Диодах 13-16, резисторов 17-21, стабилазатора 22, транзистора 23 и тиристора 24.
Узел 10 фиксации усилия состоит из выпрямительного моста 25, резисторов 26-29. и транзистора 30.
Логическийэлемент И 11 состоит из резисторов 31 и 32, диодов 33 и 34 и тиристоров 35 и 36.
1фоме того, устройство имеет выпрямительный мост 37 и блок-контакт 38.
Предлагаемое устройство для регулирования астотн вращения двигателя станка-качалки работает следующим образсял.
Синусоидальное напряжение (кривая а, фиг. 3), снимаемое с выходной обмотки синусно-косинусного поворотного трансформатора 6, являющееся функцией угла поворота кривошипа и изменяющееся с частотой,соответствукщей частоте качаний станкакачалки, подается на делитель 12 напряжения, собранный на диодах 13-16. Выделенный с него отрицательный по, лупериод напряжения (кривая б, фиг.З); соответствующий времени движения точки подвеса штанг вниз, подается навход транзистора 23 узла фиксациТи положения 9. Во входную цепь . транзистора 23, встречно этому наЬряжению вводится напряжение сравнения (кривая в, фиг. 3), регулируемое резистором 19. Наличие удобно регулируемого по величине напряжения сравнения обеспечивает задерживание закрытия транзистора 23 под действием напряжения, снимаемого с датчика 5 положения на время, необходимое для поворота вала кривошипа на угол, соответствующий уставке S (фиг. 1).
При значениях напряжения сравнения, меньших или равных напряжению, снимаемсму с да.тчика положения 5 транзистор 23 закрывается и падение напряжения ,y на резисторе 21
- уменьшается до нуля.
Благодаря нешичию тиристора 24 в коллекторной цепи транзистора 23 предотвращается возможность замыкания цепи коллектор-эмиттер транзистора 23 до конца хода точки подвеса
0 пгганг вниз, т.е. когда напряжение сравнения становится больше напряжения, снимаемого с j aTHHKa 5 положения,
5 Это обеспечивается подачей в цепь управления тиристора 24 положительного полупериода напряжения, снимаемого с датчика положения 5 через диоды 13 и 14, что обеспечивает его
0 открытое состояние при ходе точки подвеса штанг вверх до момента закрытия транзистора 23. .
Удержание тиристора 24 во включенном состоянии при отрицательном по5 лупериоде напряжения управления обусловлено Нвшичием тока в цепи коллектора транзистора 23 до момента его закрытия.
Для предотвращения открытия тиристора 24 сразу при ходе штанг
0 вверх, когда еще усилие в точке под;веса штанг не достигло установленiHoro значения F (фиг. 1) , в цепи его управления используется стабилитрон 22, задерживающий открытие
5 тиристора 24 до достижения пробивнбго для стабилитрона 22 значения напряжения Ufn. Налряженне управления, подаваемое на тиристор 24, изменяется в соответствии с кривой .З).
0 Таким образом, обеспечивается получение на выходе узла фиксации положения напряжения и„. .„ .(кривая д
« - bbtX I
фиг. 3) в течение поворота кривошипа от положения, соответствующего 5 открытому состоянию тиристора 24 при ходе вверх, до положения, соответствующего уставке S (фиг. 1). Одновременно напряжение, снимаемое с датчика усилия 7, вьпголненйого в виде дифференциального транс форматора 8., пропорциональное величине усилия в точке подвеса штанг, т.е.изменяющееся по форме кривой динамограммы (кривая е, фиг. 3) , подается на вход транзистора 30 узл 1-0 фиксации усилия. К цепи управления транзистора 30 приложено также встречно напряжение сравнения (кривая ж, фиг. 3), регулируемое резистором 27. Открытие транзистора 30 происходит при напряжениях сравнения, больших или равных напряжению, снимаемому с датчика усилия 7, что соответствует значениям усилия в штангах, меньших или равных уставке Е,, (фиг. 1) . . При открывании транзистора 30 с резистора 27 снимается выходное напряжение Ugj,, 2 продолжительностью, равной продолжительности открьатого состояния транзистора 30 (кривая 3, фиг. 3). Выходное напряжение UgLjy-, и в(,(Х2 обоих транзисторов 23 и 30 подаются к цепям управления тиристоров 35 и 36 логического элемента И 11, после довательно включенных в цепь выпрямительного тока микродвигателя 2. Работа микродвигателя 2, предназ.наченного для перемещения движка регулировочного сопротивления (не .показан), изменяющегося напряжения управления на входе системы управле ния возможны в случае одновременно |Го открытия тиристоров 35 и 36, Отч крывание указанных тиристоров проис ходит при одновременном открытии транзисторов 23 и 30, что возможно в случае исчезновения незаполнения насоса, чему соответствует пунктирная линия кривой изменения динамог раммы (фиг. 1). Импульс напряжения (кривая и, . фиг. 3) шириной, равной времени со падения кривых вьаз одных напряжений 1 вых-1 еых2 Р ° ® Д и 3, фиг. 3), ;приводит во вращение микродвигател 2 и следовательно обеспечивает йере мещение движка регулировочного сопр тивления в цепи системы управления 3 приводного двигателя 4 станка-качалки. Если длительность полученного импульса недостаточна и насос продолжает работать после этого с заполнением, то в течение следующего цикла работы глубиннонасосной установки вновь происходит одновременное откры-. вание тиристоров 35 и 36 логического элемента И 11 с целью осуществления последующего перемещения движка регулировочного сопротивления системы управления в сторону увеличения частоты вращения приводного двигателя 4, а следовательно, числа качаний станка-качалки. В результате увеличения частоты вращения двигателя 4 станка-качалки происходит изменение формы динамограммы, т.е. появление участка незаполнения скважинного насоса, что приводит к незапаздыванию открывания транзистора 30 и соответственно тиристора 35. Таким образом, появление напряженийUgjj, ии„ „ времени не совпадает .и на выходе логического элемента И 11 импульс напряжения отсутствует. Вследствие этого увеличение скорости двигателя прекращается. Когда заданный запас производительности глубиннонасосной установки полностью использован, т.е. перемещение движка регулятора доходит до упора, отключается цепь микродвигателя 2 блок-контактом 38 и станоккачалка останавливается для смены насоса. Использование изобретения для регулирования частоты вращения двигателя станка-качалки по мере износа насоса повышает точность регулирования, увеличивает надежность и срок службы скважинного насоса, а также производительность установки в целом. Испытание изобретения на действующей скважине показывает надежность ;работы устройства для.регулирования частоты вращения двигателя станкакачалки по мере износа насоса. Как показывают испытания, межремонтный период скважинного насоса увеличивается в 2,2 раза, а добыча нефти увеличивается на 14% .по сравнению с нерегулируемым режимом.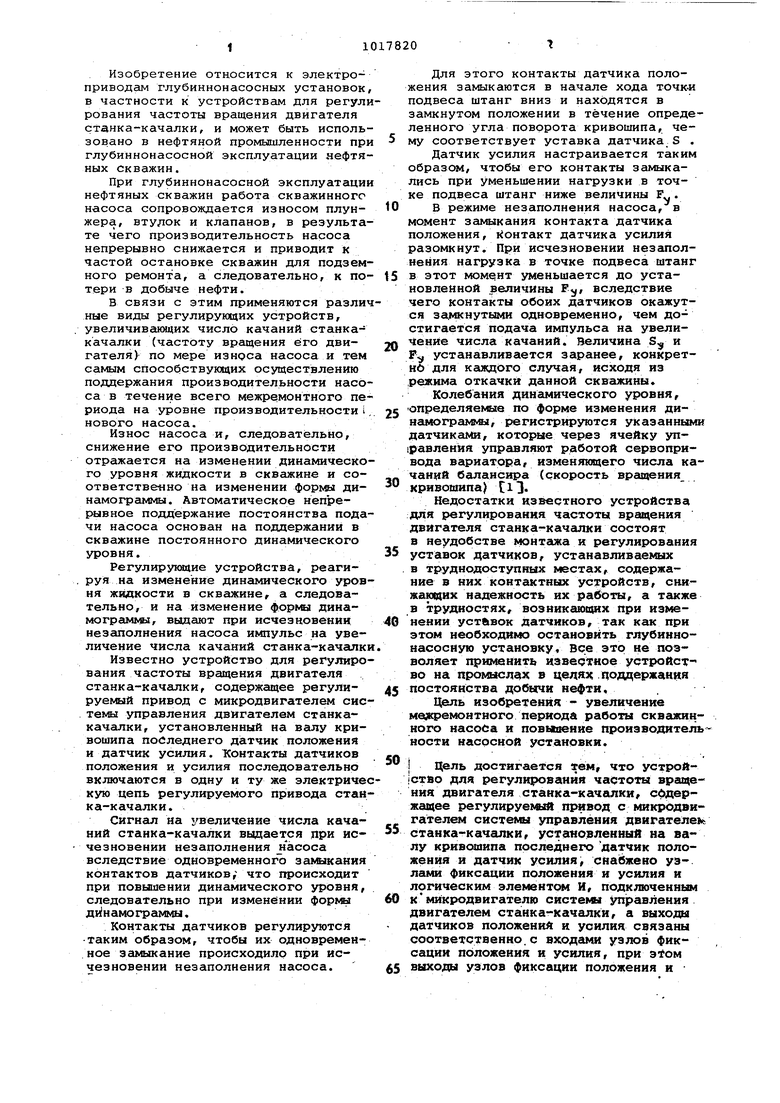
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1972 |
|
SU347872A1 |
| Устройство для автоматического управления глубиннонасосной установкой малодебитных нефтяных скважин | 1984 |
|
SU1229426A1 |
| Станок-качалка | 1980 |
|
SU943434A1 |
| Регистрирующее устройство | 1976 |
|
SU673847A1 |
| Устройство для периодической эксплуатации глубиннонасосной поршневой установки | 1977 |
|
SU703651A1 |
| Устройство для автоматического управления глубиннонасосными установками малодебитных нефтяных скважин | 1981 |
|
SU1011899A1 |
| Устройство для автоматического кон-ТРОля СОСТОяНия глубиННОНАСОСНОгООбОРудОВАНия | 1979 |
|
SU836343A1 |
| Способ определения коэффициента заполнения глубинного штангового насоса | 1983 |
|
SU1102901A1 |
| Станок-качалка | 1977 |
|
SU754110A1 |
| МАЛОГАБАРИТНЫЙ ДЛИННОХОДОВОЙ СТАНОК-КАЧАЛКА | 2011 |
|
RU2476722C1 |
I. УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ЧАСТОШ ВРАЩЕНИЯ ДВИГАТЕЛЯ СТАНКА-КАЧАЛКИ, содержащее регулируемый привод с микродвигателем система управления двигателем станкакачалкн, установленньай на валу кривошипа последнего датчик положения |и датчик усилия, о ли ча ю щ е- е с я тем, что, с целью увеличения межремонтного периода работдл скважинного штангового насоса и повьйяения производительности насосной установки, оно снабжено узлами фиксации положения и усилия и логическим элементом И, подключенным к микродвигателю системы управления двигателем станка-качалки,.а выходы датчиков положения и усилия связаны соответственно с входами узлов -фиксации положенияИ усилия,, при этом saxo№i последних соединены с вхо.« Дс1ми логического элемента И. 2. Устройство по п. 1, отличающееся тем, что датчик положения выполнен-- в виде синусно-косинусного поворотного трансформатора. „ 3. Устройство по п. 1, о т л и чающееся тем, что датчик усилия выполнен в виде дифференциальт с ного трансформатора.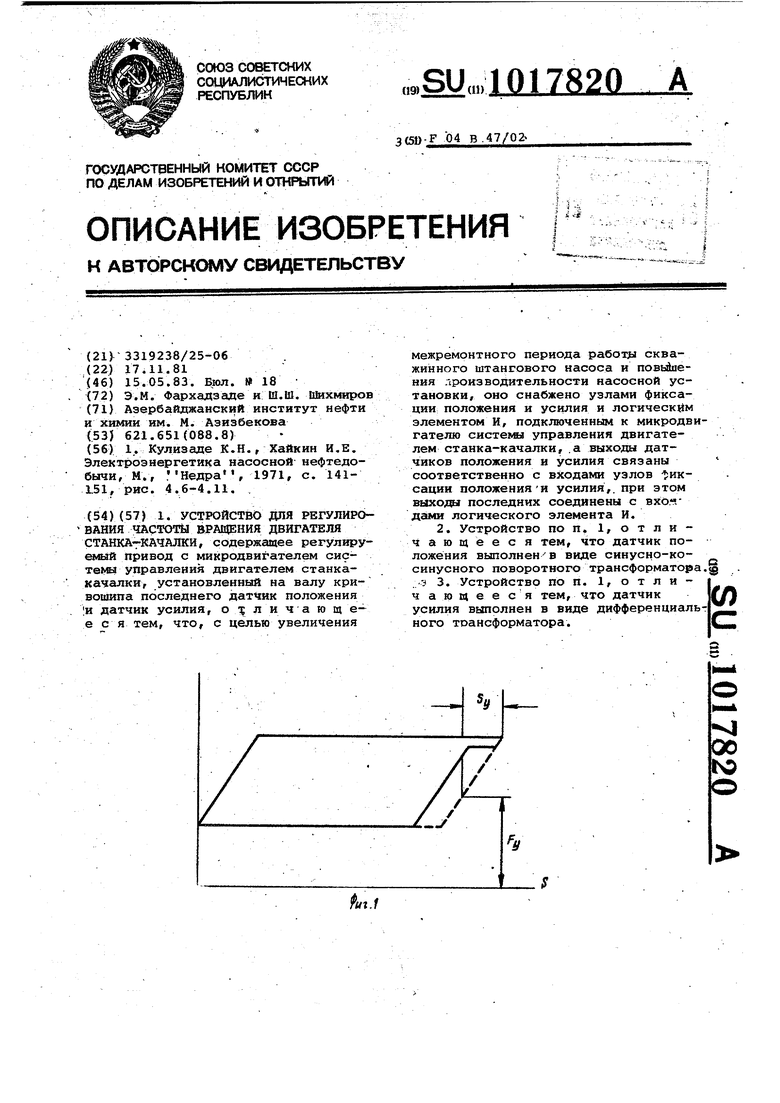
и,
mut
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кулизаде К.Н | |||
| Хайкин И.Е | |||
| Электроэнергетика насосной нефтедобычи, М., Недра, 1971, с | |||
| Станок для получения тонких и узких полосок древесины (лапши), предназначенных для приготовления целлюлозы | 1925 |
|
SU1411A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
