(54) УСТРОЙСТВО ДЛЯ АНАЛИЗА ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ГРУПП ОБЪЕКТОВ ИЗОБРАЖЕНИЯ


Изобретение относится к технике автоматического анализа совокупности объектов, проецируемых с по. мощью оптических устройств на оптико-электронный преобразователь, и может быть использовано для анализа параметров совокупности объектов в медицине, биологии, дефектоскопии, физике твердого тела, а также в других областях науки и техники.
Известны анализирующие устройства, на вход которых подается видеосигнал от телевизионного датчика, содержащие на входе дискретизатор и пороговый блок, а на выходе видеоконтрольные блоки, логические блоки, блоки обработки результатов н ре гистраторы.
Однако такие анализаторы чрезвычайно сложны, .поскольку используют нестандартную развертку либо применяют электромеханическую систему поиска объектов. К Totviy же у них не исключена возможность лшогократнбго анализа тех же объектов, неудовлётвсу рительная селекция близко расположенных объектов, низкая производительность (скорость анализа)..
Цель изобретения - увеличение скорости при раздельном анализе близко расположенных объектов.
Достигается это тем, что устройство содержит последовательно соединенные коммутатор, блок временных задержек начала разверток по строке и кадрУ, блок формирования вспомогательных им11уль( и блок формирования наклонных фигур вытеснения, вход коммутатора соединен с выходом дискретизатора, а выход блока формирования наклонных фигур вытеснения - с одним из входов логического блока, другой вход которого соединен с выходом порогового блока, и формирователь импульса выделения объекта, вход которого подключен к выходу порогового блока, а выход - к | управляющему входу коммутатора, причем вход|устройства соединен с входом порогового блoka и с одним из входов блока обработки результатов.
Больщое значение иглеет изобретение для автомаш ческогр анализа биологических препаратов, например мазков, с целью раннего обнаружения раковых и предраковых клеток.
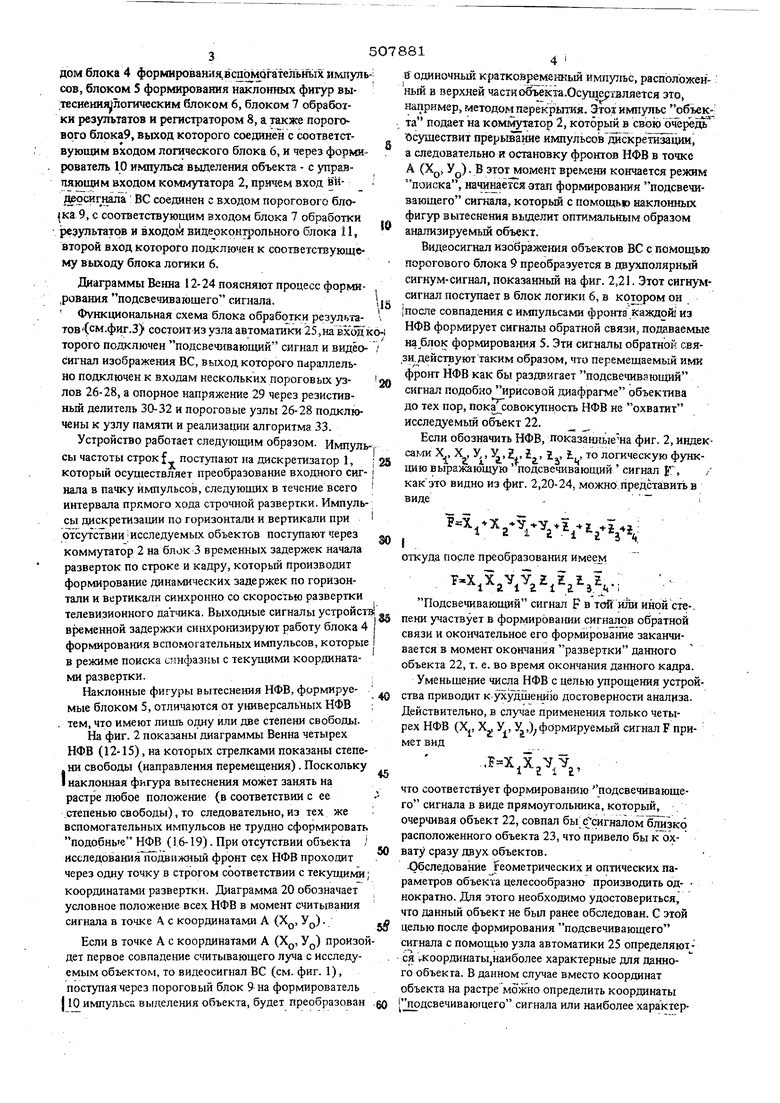
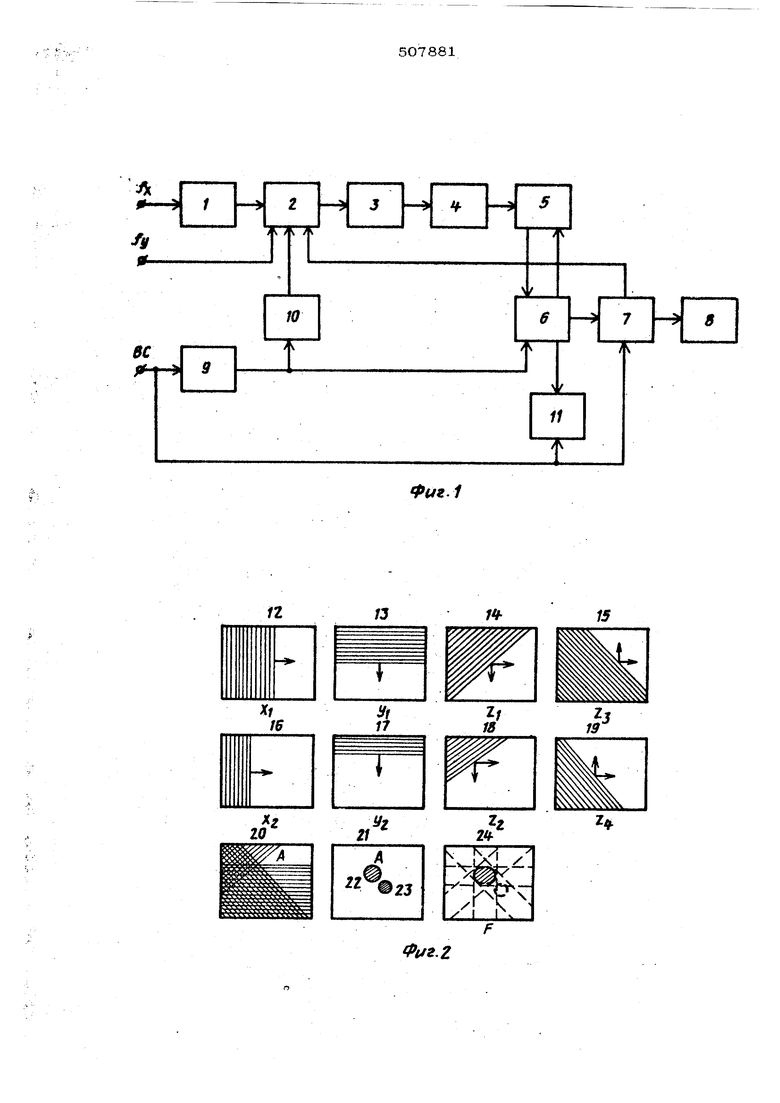
На фиг. 1 - функциональная схема предлагаемсуо устройства; на фиг. 2 - диаграммы Венна, поясняющие процесс формирования подсвечивающего сигнала; на фиг. 3 - функциональная схема блока обработки результатов.
Предлагаемое устройство состоит из дискретизатора 1, выход которого подключен к коммутатору 2, |и блока 3 временных задержек начала разверток по fCTpoKe и кадру, последовательно соединенных с входом блока 4 формирования, вспомргательШх импуль сов, блоком 5 формирования наклонных фигур вытеснения)логическим блоком 6, блоком 7 обработки результатов и регистратором 8, а также порогового блока9, выход которого соединен с соответствующим входом логического блока 6, и через форми. рователь 10 импульса выделения объекта - с управляющим входом ком 1утатора 2, причем вход видеосигнала ВС соединен с входом порогового 9, с соответствующим входом блока 7 обработки 15езультатов и BXOAoiii видеоконтрольного блока 11, второй вход которого подключен к соответствующему вьиоду блока логики 6. Диаграммы Ванна 12-24 поясняют процесс форми.рования подсвечивающего сигнала. функциональная схема блока обработки результатов(см.фиг.З) состоит из узла автомапГки 25.,на вхбдк торого подключен подсвечивающий сигнал и видеоСигнал изображения ВС, выход которого параллельно подключен к входам нескольких пороговых узлов 26-28, а опорное напряжение 29 через резистивньш делитель 30-32 и пороговые узлы 26-28 подключены к узлу памяти и реализации алгоритма 33. Устройство работает следующим образом. Импуль сы частоты строк f.j поступают на дискретизатор 1, который осуществляет преобразование входного сигнала в пачку импульсов, следуюшях в течение всего интервала прямого хода строчной развертки. Импульсы дискретизации по горизонтали и вертикали при отсутствииисследуемых объектов поступают через коммутатор 2 на блок 3 временных задержек начала разверток по строке и кадру, который производит формирование динамических задержек по горизонтали и вертика/ги синхронно со скорость развертки телевизионного датчика. Выходные сигналы устройст временной задержки синхронизируют работу блока 4 формирования вспомогательных импульсов, которые в режиме поиска сянфазиы с текущи ш координатами развертки. Наклонные фигуры вытеснения НФВ, формируемые блоком 5, отличаются от универсальных НФВ тем, что имеют лищь одну или две степени свободы. На фиг. 2 показаны диаграммы Веина четырех НФВ (12-15), на которых стрелками показаны степе ни свободы (направления перемещения). Поскольку I наклонная фигура вытеснения может занять на растре любое положение (в соответствии с ее .степенью свободы), то следовательно, из тех же вспомогательных импульсов не трудно сформировать подобные НФВ (16-19). При отсутствии объекта исслед,оваш1я подвижный фронт сех НФВ проходит через одну точку в строгом соответствии с текущими координатами развертки. Диаграмма 20 обозначает условное положение всех НФВ в момент считывания сигнала в точке А с координатами А (Х, У). Если в точке А с координатами А (Х, У) произо дет первое совпадение считывающего луча с исследуемым объектом, то видеосигнал ВС (см. фиг. 1), поступая через пороговый блок 9 на формирователь j Ю импульса выделения объекта, будет преобразован и одиночный кратковременный импульс, расположенный в верхней части объекта.Осуигерталяется это, например, методом перекрытия. Это1 импульс рбъ та подает на коммутатор 2, который в свою очереда Осуществит прерывание импульсов даскретймции, а следовательно и остановку фронтов НФВ в точке А (Хр, Уд). В зтот момент времени кончается режим поиска, начинается .этап формирования подсвечивающего сигнала, который с помощью наклонных фигур вытеснения выделит опл- мальным образом анализируемый объект. Видеосигнал изображения объектов ВС с помощью порогового блока 9 преобразуется в двухполярный сигнум-сигнал, показанный на фиг. 2,21. Этот сигнумсигнал поступает в блок логики 6, в котором он |после совпадения с илтульсами фронта каждой из НФВ формирует сигналы обратной связи, подаваемые формирования 5. Эти сигналы обратной связи, дейстауюттаким образом, что перемещаемый ими фронт НФВ как бы раздвигает подсвечивающий сигнал подобно ирисовой диафрагме объектива до тех пор, пок овокупность НФВ не охватит исследуемый объект 22. Если обозначить НФВ, показаяныена фиг. 2, индекca ди X , X , У,, 5, 2 , 2., i, i, то логическую функдню выражающую подсвечивающий сигнал J, какэто видно из фиг. 2,20-24, можно представить в виде- ,X, откуда после преобразования имеем Подсвечивающий сигнал F в той или иной сте-. пени участвует в формировании сигналов обратной связи и окончательное его формирование заканчивается в момент окончания развертки данного объекта 22, т. е. во время окончания даршого кадра. Уменьщение числа НФВ с целью упрощения устройства приводит Кухудшенйю достоверности анализа. Действительно, в случае применения только четырех НФВ (X., Х У , У ,) фбрмируемый сигнал F примет вид .., что соответствует формированию подсвечивающего сигнала в виде прямоугольника, который, очерчивая объект 22, совпал бьГвГсигналом близко расположенного объекта 23, что привело бы к охвату сразу двух объектов. -Обследование Геометрических и оптических параметров объекта целесообразно производить од- нократно. Для этого необходимо удостовериться, что данный объект не был ранее обследован. С зтой целью после формирования подсвечивающего сигнала с помощью узла автоматики 25 определяют ся ;,координаты,наиболее характерные для данного объекта. В данном случае вместо координат объекта на растре можно определить координаты Чтрдсвечиваютего сигнала или наиболее хара ктерной его части, а именно прямоугольника, формируем го с помощью НФВ у, 5L У , . При этом часто- казЙ1вается, что достаточно опрёделйГть.только координаты центра подсвечивающего сигнала, а именно координаты точки Ац, которые выражаются следующим офазом ,где А, - абсцисса точки А,,; , -Хцч; Xjj , Х - абсциссы фронтов НФВ Xj и 21 |У„ , У- - ординаты фронтов НФВ у, и у-. I У У2 Код координат точки А с помощью операцш срав нения сравнивается скодалт координат объектов, записанных ранее в память узла 25. Сложность памяти опрёделяется точностью вводимых координат и числом ячеек памяти. В данном случае нет необходимости определять н запоминать координаты объектов с высотой точностью, а достаточно вводить некоторое округленное значение, так как центры объек тов не могут быть близко расположены друг к другу. Число ячеек памяти также может быть выбрано небольшим, поскольку после.прохождения грутлы строк, соответствующих высоте одного объекта, пов торный анализ мало вероятен. Поэтому сравнение координат объекта с координатами объектов, записанных ранее, следует производить в той последова; тельности, в которой была произведена запись координат. В случае, если код координат найденного объекта совпадает с кодом координат ранее анализируемого объекта на выходе цифровых схем сравнения узла 25 появляется импульс, который, поступая на комм татор 2, дает команду к поиску следующего объекта. Если при поочередном сравнении координат найденного объекта не произойдет равенства с кодами координат ранее анализируемых объектов, то блок автоматики произведет перезапись координат объек« та в память вместо координат наиболее уста|ревщего во времени объекта. При этом производится разрешение на анализ. Данный процесс целеI сообразно;производить во время обратного хода по кадру. В течение следующего кадра происходит анализ геометрических и оптических параметров данного |объекта в соответствии с выбранным алгоритмом. С этой целью подсвечивающий сигнал с выхода Сло;Ка логики, а также видеосигнал ВС поступают на блок обработки результатов 7, который, работая параллельно по ряду уровней видеосигнала, как показано на фиг. 3, осуществляет анализ вьшеленно го объекта в течение одноп кадра. При этом данные о геометрических и оптических параметрах объекта ; обрабатьшают узлом 33 памяти и реализации алгори ма./ Поиск следующего объекта производится во время следующего кадра. При этом коммутатор 2, синхронизируемый импульсами синхронизации, оснащает ся peiHCTpOM памяти координат X ;Уд предьщущего объекта. Дальнейщая работа устройства происходит аналогично. Результаты анализа записываются в регистрирующем устройстве обычным образом. Формула изобретенная Устройство для анализа геометрических параметров групп объектов изображения, содержащее дискретизатор, пороговый блок и последовательно соединенные логический блок, блок обработки результатов и регистратор, отличающееся тем, что, с целью увеличения быстродействия при р зпельном анализе близко расположенных объектов, устройство содержит последовательно соединенные коммутатор, блок временных задержек начала разверток по строке и кадipy, блок формирования вспомогательных импульjCOB и блок формирования наклонных фигур вытес1нения, вход коммутатора соединен с выходом дискретизатора; а выход.блока формирования наклонных фигур вытеснения - с одним из входов логического блока, другой вход которого соединен с выходом порогового блока, и формирователь импульса вьщелення объекта, вход которого подключен к выходу порогового блока, а выход - к управляющему входу коммутатора, причем вход устройства соединен со входом порогового блока и с одним из входов блока обработ кн результатов.
ve.l
Xi
W
,1
,/
Ч 10
ч
24
Щ-. 21 ©2J
tf
Фиг.З
