Изобретение относится к области электроизмерительной техники. Оно предназначено для применения в автоматических экстремальных мостах переменного тока, измеряюш,их параметры комплексных сопротивлений и проводимостей.
Известны способы подекадно-следящего уравновешивания цифровых автоматических мостов переменного тока, основанные на принципе экстремального регулирования с применением параметрической модуляции.
Недостатком известного способа уравновешивания является его сравнительно низкое быстродействие, обусловленное тем, что система уравновешивания производит за время одного рабочего такта только один шаг уравновешивания.
Целью изобретения является повышение быстродействия моста.
Добиваются этой цели за счет того, что после выбора направления уравновешивания производят модуляционное воздействие, равное по величине семи шагам уравновешивания, и при отрицательном прирашении амплитуды сигнала неравновесия измерительной цепи система уравновешивания производит четыре шага к равновесию, затем производят модуляционное воздействие, равное по величине трем шагам уравновешивания, и при отрицательном приращении амплитуды сигнала неравновесия система уравновешивания производит два шага к равновесию, в следующем такте производят модуляционное воздействие, равное по величине одному шагу уравновешивапия, и при отрицательном приращении амплитуды сигнала неравновесия система уравновешивания нроизводпт один шаг к равновесию; модуляционные воздействия, равные по величине одному шагу уравновешивания, производятся до наступления состояния равновесия.
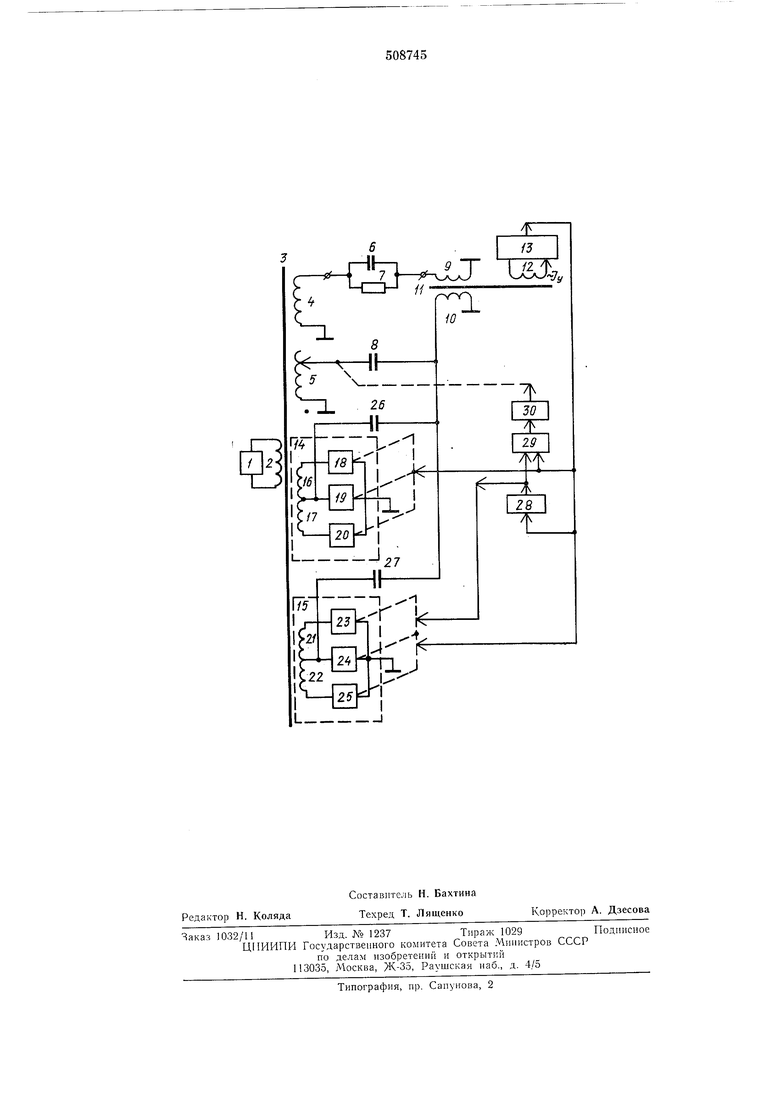
На чертеже приведена упрощенная схема моста, иллюстрирующая нример реализации нредлагаемого способа уравновешивания.
Для простоты рассматриваем уравновешивание цифрового экстремального моста для измерения параметра конденсаторов только на одной декаде параметра С (элементы, относящиеся к уравновешиванию но другому параметру не показаны).
С генератора синусоидального напряжения 1 напряжение рабочей частоты подается на первичную обмотку 2 трансформатора напряжений 3 мостовой цепи. С плечевых обмоток
4 и 5 этого трансформатора подаются напряжения соответственно на объект измерения 6, 7 и на образцовую меру 8. Обмотка 5 выполнена декадно регулируемой. Токи, протекающие через объект измерения и образцовую меру, подаются на обмотки 9 и 10 компаратора
токов 11 с тесной индуктивной связью. К указательной обмотке 12 этого компаратора подключен амплитудный детектор равновесия 13 с близким к иулю входным сопротивлением. Для амплитудной модуляции тока, протекающего через образцовую меру 8, служат модуляторы 14 и 15. Модулятор 14 состоит из двух одинаковых обмоток 16 и 17 и трех ключей 18, 19 и 20, модулятор 15 - из двух одинаковых обмоток 21 и 22 и трех ключей 23, 24 и 25. Работа модулятора 14 происходит таким образом, что в зависимости от направления уравновешивания открываются поочередно либо ключи 19 и 18, либо ключн 19 и 20. Модулятор 15 работает аналогично (поочередно открываются либо ключи 24 и 23, либо ключи 24 и 25). Открытым может быть всегда только один из ключей каждого модулятора. При выключенных модуляторах открыты ключи 19 и 24. Напряжение с модуляторов подаетея соответственно иа модуляционные конденсаторы 26 и 27. Токи, протекающие через модуляционные коиденеаторы 26 и 27, подаются на обмотку 10. Модуляторы 14 и 15 выполняются таким образом, что при работе только модулятора 14 ток через образцовую yiepy 8 изменяется на величину, соответствующую трем шагам уравновешивания, а при работе только модулятора 15 - на величину, соответствующую четырем шагам уравновещивания. Модулятор 14 управляется детектором равновесия 13, а модулятор 15 - детектором равновесия 13 - и счетчиком тактов 28 (двоичный трехразрядный счетчик импульсов). В зависимости от состояния счетчика тактов модулятор 15 может работать противофазно или синфазно с модулятором 14, или быть выключенным во время работы модулятора 14. Таким образом, при работе модуляторов 14 и 15 синфазно (открыты либо ключи 18 и 23, либо 20 и 25) ток через образцовую меру 8 изменяется на величину, соответствующую семи шагам уравновешивания, а при работе модуляторов противофазно (открыты либо ключи 18 и 25, либо - 20 и 23) - на величину, соответствующую одному щагу уравновещивания. При этом генератор чисел 29 при отрицательном приращении модуля выходного тока /у в зависимости от состояния счетчика тактов 28 выдает на вход устройства уравновешивания 30 четыре, два и один импульс.
Мост работает следующим образом.
Допустим, что неравновесие на декаде равно двум шагам и нанравленне уравновешивания неизвестно. Вначале определяется направление уравновешивания. Для этого модуляторы 14 и 15 включаются противофазно (открыты ключи 20 и 23).
Допзстим, что модуль выходного тока получил в результате модуляционного шага положительное приращение. Тогда детектор равновесия 13 делает длительность такта уравновешивания равной двум периодам модуляции (т.м), измепяет направление уравновешивания и изменяет на единицу состояние счетчика тактов 28. В следующем такте модуляторы 14 и 15 включаются снифазно (открыты ключи 18 и 23). Б результате этой 1модуляции модуль выходного тока /у получает положительное приращение. Детектор равновесия 13 делает такт уравновешивания равным т.м и изменяет состояние счетчика тактов 28 на единицу. В третьем такте модулятор 15 выключен (открыт ключ 24) и включается только модулятор 14 (открывается ключ 20). В результате этой модуляции модуль выходного тока /у получает отрицательное приращение. Детектор равновесия делает такт уравновешивания
равным рабочему такту тр и изменяет состояние счетчика тактов 28 на единицу. Генератор чисел выдает на вход устройства уравновешивания 30 два имнульса. Устройство уравновещивания изменяет состояние измерительной
цепи так, что модуль выходного тока /у становится равным нулю. В начале следующего такта уравновешивания модуляторы 14 н 15 включаются противофазно (открываются ключи 18 и 25). На выходе детектора равновесия
появляется положительное приращение. Счетчик тактов 28 сбрасывается в исходное состояние и мост по алгоритму переходит на уравновешивание следующей декадой. Счетчик тактов и генератор чисел 29 являются общим для всего устройства. Для амплитудной модуляции тока, протекающего через образцовую меру по второму параметру, требуются модуляторы, аналогичные модуляторам 14 и 15.
Формула изобретения
Способ подекадно-следящего уравновешивания цифровых автоматических мостов перемеппого тока, основанный на принципе экстремального регулиромания с применением параметрической модуляции, отличающийся тем, что, с целью повышения быстродействия моста, после выбора направления уравновешивания производят модуляционное воздействие, равное по величине семи шагам уравновешивания, и при отрицательном приращении амплитуды сигнала неравновесия измерительной цепи система уравновешивания пронзводит четыре шага к равновесию, затем производят модуляционное воздействие, равное по величине трем шагам уравновешивания и при отрицательном приращении амплитуды сигнала неравновесия система уравновешивания
производит два шага к равновесию, в следующем такте производят модуляционное воздействие, равное по величине одному шагу уравновешивания и при отрицательном приращении амплитуды сигнала неравновесия система уравновешивания производит один шаг к равновесию; модуляционные воздейетвия, равные по величине одному щагу уравновещивания, нроизводятся до наступления состояния равновесия.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения модуля и фазового угла векторных величин | 1974 |
|
SU525027A1 |
| Способ автоматического уравновешивания цифровых экстремальных мостов переменного тока | 1980 |
|
SU894580A1 |
| Способ уравновешивания цифровых экстремальных мостов переменного тока | 1989 |
|
SU1762246A1 |
| СПОСОБ УРАВНОВЕШИВАНИЯ МОДУЛЯЦИОННЫХ ЭКСТРЕМАЛЬНЫХ МОСТОВ ПЕРЕМЕННОГО ТОКА | 1971 |
|
SU313163A1 |
| Способ уравновешивания цифровых экстремальных мостов переменного тока и устройство для его осуществления | 1986 |
|
SU1418626A1 |
| Цифровой автоматический экстремальныйМОСТ пЕРЕМЕННОгО TOKA | 1979 |
|
SU828096A1 |
| Цифровой экстремальный мост переменногоТОКА C пОдЕКАдНО-СлЕдящиМ уРАВНОВЕшиВА-НиЕМ | 1979 |
|
SU836596A1 |
| Способ выбора поддиапазона измерений в универсальных экстремальных мостах переменного тока | 1987 |
|
SU1429044A1 |
| Цифровой экстремальный мост переменноготока | 1974 |
|
SU508746A1 |
| Автоматический мост переменного тока | 1979 |
|
SU834536A1 |