векторов А и Л о производятся синхронно, но противофазно, т. е. когда один из векторов увеличивается по модулю, то другой уменьшается, и наобо рот. Ори модуляции фазовые углы векторов Л д. и Л(, не изменяются, изме1 Я10тся только их модулИ.
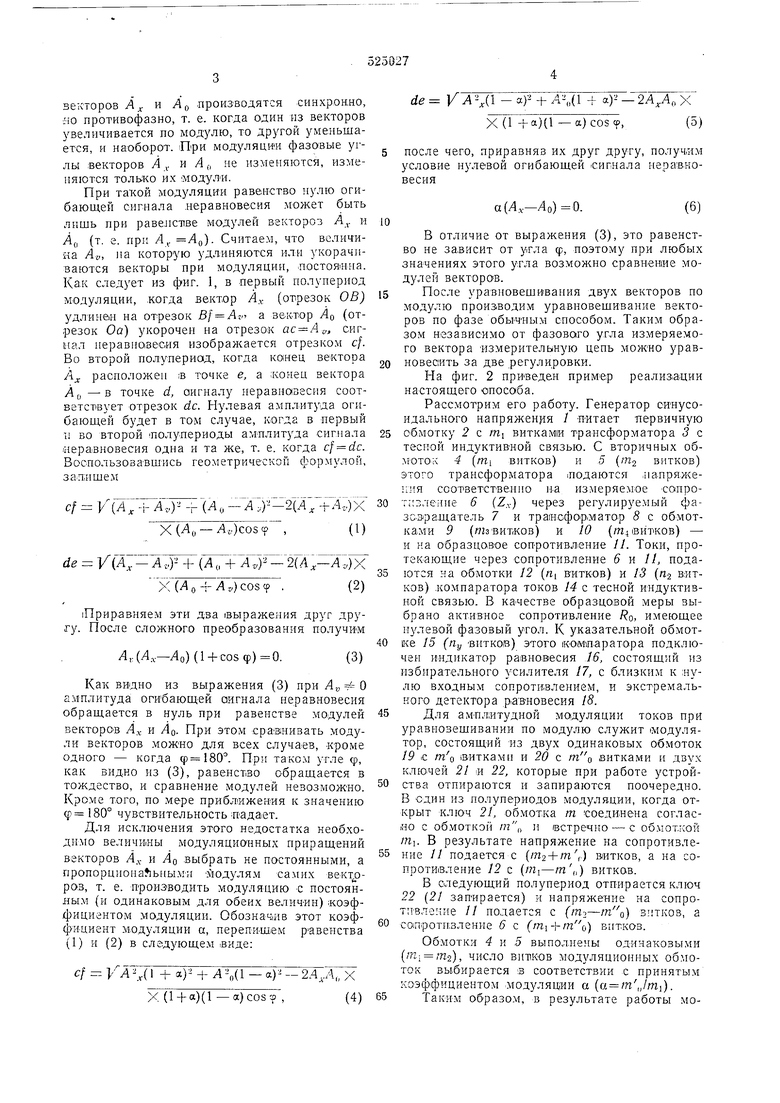
При такой модуляции равенство нулю огибающей сигнала неравновесия может быть лишь ири равенстве модулей вектороз Л,, и Л(, (т. е. при Л, Ло). Считаем, что величина Л;,, на которую удлиняются или укорачиваются векторы при модуляции, постоя нна. Ка,к следует из фиг. 1, в первый полуиериод модуляции, когда вектор Л.. (отрезок ОВ) удлинен на отрезок В/ Лг. а вектор Ло (отрезок Оо) укорочен на отрезок ас Ау, сигнал нерав1Ю|Весия изобралсается отрезком с/. Во второй полупериад, когда конец вектора расположен ;в точке е, а ;конец вектора Л о -в точке d, сигналу неравновесия соответствует отрезок dc. Нулевая амплитуда огибающей будет в том случае, когда в первый 1 во второй полупериоды амплитуда сигнала неравновесия одна и та же, т. е. когда cf dc. Воопользовавщись геометрической формулой, зап;ишем
cf Y( - л ;)-2и -f л..)х
Х(Ло-Л,,.)созт,(1)
de I/(A;-Л,,)- + (л7Т.)Г
Х(Л о-г л;) COS ср .(2)
Приравняем эти два (выражения друг другу. После сложного преобразования получим
Л,(Л..-Лo)(l-fcosф)0.
Как видно из выражения (3) при Л„ О амплитуда огибающ ей аигнала неравновесия обращается в нуль при равенстве модулей векторов АХ и АО. При этом сравнивать модули векторов можно для всех случаев, кроме одного - когда ф 180. При таком угле ф, как видно из (3), равенство Обращается в тождество, и сравнение модулей невозможно. Кроме того, по мере приближения к значению р 180° чувствительность пада1ет.
Для исключения этого недостатка необходимо величИ|Ны модуляционных приращений векторов Л.- и АО выбрать не постоянными, а пропорциональными йодуля.м самих вект)ров, т. е. производить модуляцию с постоянным (и одинаковым для обеих величин) коэффициентом модуляции. Обозначив этот коэффициент модуляции а, переиищ1ем равенства (1) и (2) в следующем виде:
с/ V Л ,( 1 + а)М- Л -„(1 - а)- - 2Л,.Д„ )
(1+а)(1 - a)cosf ,
de КЛУ1 - а)- + Л-„(1 -Ь а)- -2ЛИо Х(1 -f-a)Tl - a)coscp,
(5)
5 после чего, приравняв их друг другу, получим условие нулевой огибающей сигнала неравновесня
а(Л,,.-Ло)0.
(6)
В отличие от выражения (3), это равенство не зависит от угла ф, поэтому при любых значениях этого угла возможно сравнение модулей векторов.
После уравновещивания двух векторов по модулю производим уравновешивание векторов по фазе обычным способом. Таким образом независимо от фазового угла измеряемого вектора измерительную цепь можно уравновепить за две регулировки.
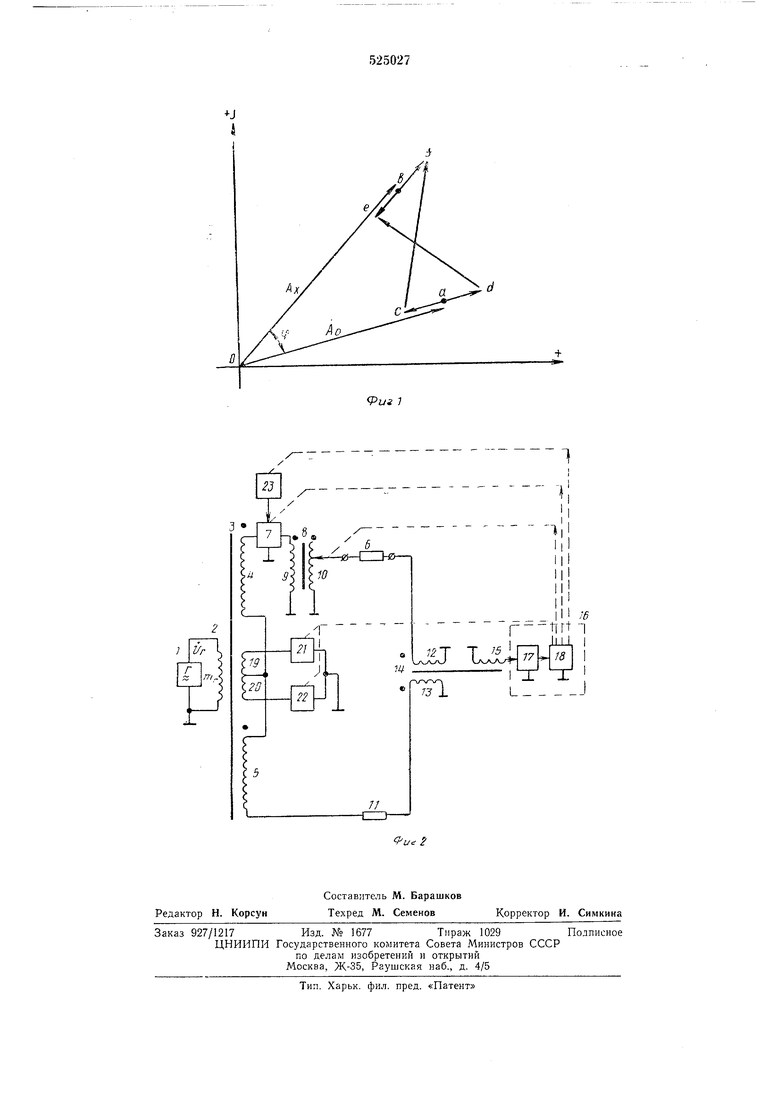
На фиг. 2 приведен пример реализ.ации настоящего способа.
Рассмотрим его работу. Генератор синусоидального напряжен}1я / питает первичную обмотку 2 с /П; витками трансформатора 3 с тесной индуктивной связью. С вторичных обмоток 4 (nil витков) и 5 (/7X2 витков) этого трансформатора подаются напряжения соответственно на измеряемое сопрот::зление 6 (Z.v) через регулируемый фазсэращатель 7 и тра1Нсфор|Матор 8 с обмотками 9 («гзвит.ков) и 10 (т4 витков) - и на образцовое сопротивление 11. Токи, протекающие чгрез сопротивление 6 и //, подаЮТСЯ на обмотки 12 («, ВИТКОВ) и 13 («2 В:ИТков) компаратора токов 14 с тесной индуктивной связью. В ка честве образцовой меры выбрано активное сопротивление , имеющее нулевой фазовый угол. К указательной обмот|ке 15 (Пу витко/в) этого комларатора подключен индикатор ра1вновесия 16, состоящий из избирательного усилителя 17, с близким к нулю входным сопротивлением, и экстремального детектора р-авновесия /8.
Для амплитудной модуляции токов при уравновешивании по модулю служит модулятор, состоящий из двух одинаковых обмоток 19 с то .витками и 20 с витками и двух клЮЧей 21 И 22, которые при работе устройства отпираются и запираются поочередно. В один из полупериодов модуляции, когда открыт ключ 21, обмотка т соединена согласно с об.моткой /77,, и встречно - с обмоткой nil. В результате напряжение на сопротивлекие // подается с (inz + m,) в итков, а на сопроти1вление 12 с () витков.
В следующий полупериод отпирается ключ 22 (2 запирается) и напряжение на сопротивление // подается с ( витков, а
со1иротп;вление 6 с ((,) витков.
Обмотки 4 и 5 выполнены одинаковыми
(П: П-2), число витков МОДУЛЯЦИОННЫХ ОбмОток выбирается в соответствии с принятым коэффициентом модзляц/ии а (a m,,/mi). Таким образом, в результате работы модулятора напряжения, нодаваемые на сопротивления Z.V и RO, промодулированы по амплитуде по прямоугольному закону, причем фазы модуляции противололожны друг другу. Сигнал неравновесия, подаваемый на экстремальный детектор равновесия 18 через усилитель 17, лредста1вляет собой а;мплитудномодулированное напряжение. Детектор 18 выделяет огибающую этого сигнала и аналИЗирует ее. Уравновешивание измерительной цепи по модулю сводится к регулированию числа витков т вторичной обмотки 10, трансформатора 8 до тех пор, пока детектор 18 не зафиксирует отсутствие огибающей в сигнале «еравновесия, что свидетельствует о выполнении равенства модулей ампервитков токов через обмотки 12 и 13. Как видно из фиг. 2, это равенство наступает при выполнении следующего соотнощения (коэффициент передачи по амплитуде регулируемого фазовращателя 7 принят равным единице): т.,п. Откуда |Z,-i oт,,тм„ или, учитывая, что mt m2 - f - An
Как видно из уравнения (9), регулируемое число витков та, прямо пропорционально измеряемому модулю Zx. Коммутацией числа витков П| обмотки 12 при неооходимости можно изменять пределы измерения.
Лосле уравнове1щивания цепи по модулю начинают уравновещивание по фазовому углу. Для этого производят пробное воздействие модулятором фазы 23, а затем при получении отрицательного приращения на выходе экстрем альнаго детектора равновесия производят изменение состояния регулируемого фазовращателя 7. Уравновешивание производят до тех по-р, пока а.мплитуда огибающей сигнала неравновесия не станет равной нулю. Токи через измеряемое 1сопротивление Z,.- и меру RQ соответственно р.авны
Способ измерения 1модуля и фазового угла .векторных величин, содержащий уравновешивание по модулю и фазе экстремальной системой, регулирующие воздействия в которой создаются путем параметрической модуляции, отличающийся тем, что, с целью расширения рабочего диапазона измеряемых величин и повыщения быстродействия, при уравновешивании по модулю производят синхронную противофазную амплитудную модуляцию сравниваемых векторных величин с одинаковыми коэффициента ми модуляции и регулируют амплитуду одной из величин до тех пор, пока амплитуда огибающей сигнала неравновесия, представляющего собой разность сравниваемых векторных величин, нз станет равной нулю. т, OT; -iZ |-e«и/ // о - г ;,«-р-Из приведенных выражений видно, что угол поворота фазы ф регулируемого фазовращателя 7 прямо пропорционален фазовому углу ф,х: измеряемого сопротивления. Измерение модуля и фазы комплексного сопрот1ивления или напряжения по описанному спосоиу может производиться в специально разработанных для этой цели устройствах. Кроме того, описанный способ можно использовать в цифровых универсальных автоматических мостах переменного тока как один из режимов работы универсального моста, так и для вспомогательной операции (напри мер, для 1выбора пределов измерения, т. е. для выравнивания модулей токов через измеряемое и образцовое сопротивление перед выбором рода работы). Реализация предложенного способа наиболее целесообразна в модуляционных экстремальных приборах, так как такие устройства уже содержат практически все необходимые для этого элементы, такие как модулятор, усилитель сигнала неравновесия, экстремальный детектор равновесия и др. Фор.мула изобретения

| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой экстремальный мост переменноготока | 1974 |
|
SU508746A1 |
| Способ автоматического уравновешивания цифровых экстремальных мостов переменного тока | 1980 |
|
SU894580A1 |
| Способ автоматического выбора измеряемых параметров комплексного сопротивления в универсальных экстремальных мостах переменного тока | 1975 |
|
SU769438A1 |
| Уровнемер трехслойных сред | 1978 |
|
SU711365A1 |
| Способ подекадно-следящего уравно-вешивания цифровых автоматических мостовпеременного тока | 1974 |
|
SU508745A1 |
| Способ уравновешивания цифровых экстремальных мостов переменного тока | 1989 |
|
SU1762246A1 |
| Способ автоматического выбора измеряемых параметров комплексного сопротивления в универсальных экстремальных мостах переменного тока | 1973 |
|
SU711479A1 |
| Цифровой экстремальный мост переменного тока | 1987 |
|
SU1479882A1 |
| ЦИФРОВОЙ ЭКСТРЕМАЛЬНЫЙ МОСТ ПЕРЕМЕННОГО ТОКА | 1972 |
|
SU331319A1 |
| ИНДУКТИВНО СВЯЗАННЫМИ ПЛЕЧАМИ ДЛЯ | 1969 |
|
SU247400A1 |
I
