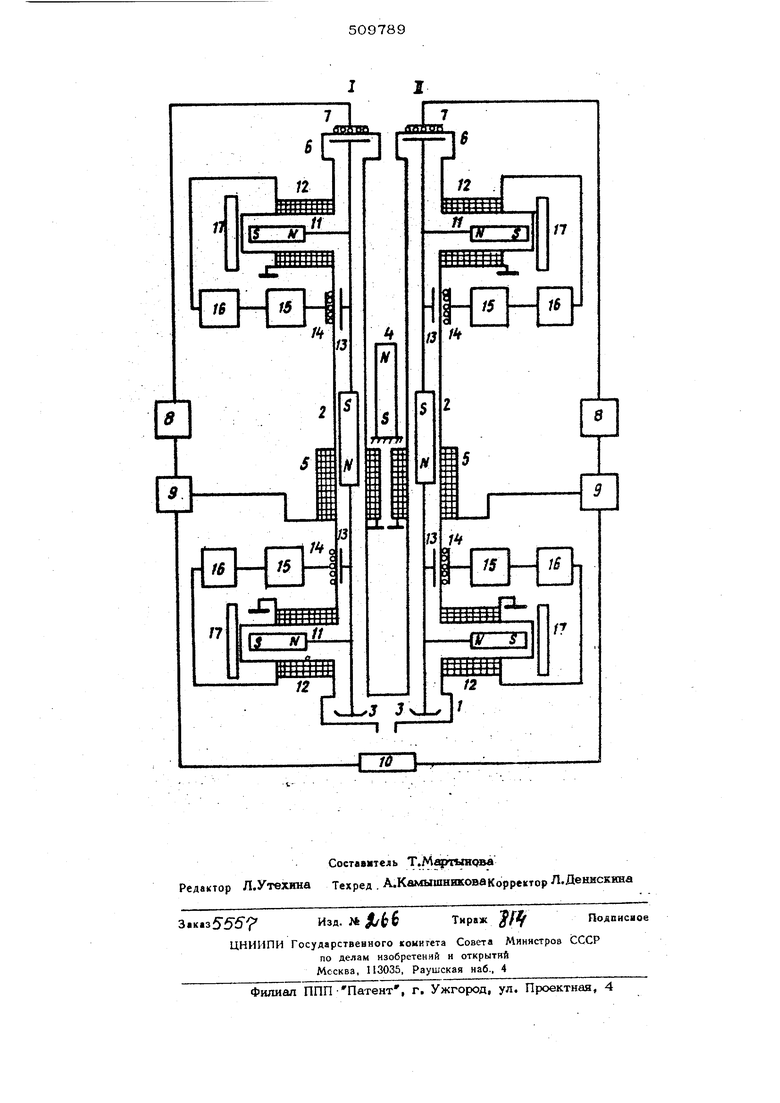
Изобретение относится;к области веооиэ мерительной техники. Известны аналитические весы с 9лектрс магнитчым уравновешиванием, содержащие помешенный в герметичньй корпус подвнж ный постоянный магнит, размешенный BHyiw ри неподвижного соленоида и связанный с центрируюшим приспособлением и;грузЬприемной чашей, элементы автоматического рв гулирования и регистрирующий прибор. Однако точность работы таких весов недостаточна. . С целью повышения точности предложенные весы снабжены дополнительными эталон ным подвижным постоянным магнитом с цент рируюшим приспособлением и грузоприемной чашеф, расположенными в герметичном кор лусе параллельно подвижному постоянному магниту внутри неподвижного соленоида, и дополнительным неподвижным постоянным (магнитом, расположенным между подвижнып |ми магнитами. На чертеже пр«ядс гав;;«нс схема весов. Йвса содержат две идентичные; 9лектр :магнитные системы I и II, Система I пред назначена для измерения веса, система П {ДЛЯ уравновешивания начального веса ПОА|вижных частей. В замкнутом сосуде 1 помешена подвижная система, состояшая из посто5шного магнита 2, жестко соединенного с грузоприемной чашей 3. Магнит 2 разме-. |шен в магнитном поле неподвнжного магни1та 4 и внутри соленсжда 5, являюшегося j исполнитель&1м элементом системы верти кального слежения. Положение подвижной системы в вертикальной плоскости контролируется системой вертикального слежения, состоящей из датчика положения - пласт |ны 6, жестко связанной .с подвижной енотем й, катушки 7 высокочастотного генерато ра 8, операционного усилителя 9, соленоида 5 и измерителя разности токов 10. В результате взаимодействия магнитов 2 и 4 обеспечивается устойчяовость магн№|та .2 по вертикали. Устойчивость в горизон 1тальной плоскости обеспечнвается с помощью центрирующего устройства. i Центрируюшее устройство содержит два Iдополнительных постоянных магнита 11. Маг ниты Нежестко связанные с подвижной си- стемой, размешены гориэ онтально внутри соленовда 12 и имеют датчики положения - nnacTinibi 13, Кроме пластины 13 в систему горизонтального слежения входят катушки 14 высо KoqacTOTiibix генераторов 15, операшюнныв усилнтега 16 и соленоиды 12. Для исключе ния поворота подвижной системы вокруг оси полюса магнитов 11 размешены вблизи направляюшик ферромагнитных стержней 17, Длина стерждей 17 выбрана такой, чтобы ; на результатах измера шй не сказывалась реакция на вертикаш ихэе перемешение nof ижиой системы. Центрирующее устройство работает следующим образом., При отклонении подвижного магиита 2, например, BiipaBo соеднкеииая с ним пласт но 13 приближается к катушке 14.° При зтом изменяется величина выходного 9игнан па v-eHeparopa 15, который поступает на вход операциошшго усилителя 16, а далее в сопапппд .1.2, Последний воздействует на магиит II, отклоняя его влево. При иткло енпи пластшхы 13 влево -магнит 11 вытал и это отклонение компенкиваетси вправо сИРустоя. Процесс измерения веса в зак-кнутом сосуде 1 1ФОЯСХОДИТ спедуюшим образом. В первоначальной момент времени вес подпи.чиюй ciiCTGMi.i 1 равен весу подвижной систсчлы Г1, На 3 (система I) находится навеска, вес которой изменяетсгг в 1ч чоние времени. При увеличении веса, нащшмер, на чаше 3 (система I), наруша-i ется разенство сил йагиитного взаимодейстБия постошпплх tviaPHHTOB 2 .(система- 1). и 4 и веса подвижной системы, и чаша 3 опускается. Пластина 6 отодвигается от катушки 7, на выходе высокочастотного генератора 8 появляется сигнал, который поступает на вход операционного усилителя 9 и далее в соленоид 5. Ток, возникший в соленоиде 5, создает электромагнитное поле, взаимодействующее с магнитом 2. В результате этого взаимодействия возникает сила, компенсируюшая изменение,веса t pyза. Разность токов в солевондах 5 свстем t и П является мерой изменения веса н регистрируется измерителем разности токов 10. I формула нзобретени.я Аналитические весы с электромагнитным уравновешиванием, содержаише помешенный в герметичный корпус подвижный постоянный магнит, размешенный внутри неподвижного соленоида и связанный с центрируюишм пр способленнем и грузоприемной чашей, элементы автоматического регулирования и р гистрируюший прибор, отличающие с я тем, что, с целью повышения точности, они снабжены дополнительным эталонным подвижным постоянным магнитом с центриру шим приспособлением и грузоприемиой чаей, расположенными в герметичном корпуе параллельно подвижному постоянному магиту внутри неподвижного соленоида, и до олнительным неподвижным постоянным маг итом, расположенным между подвижными магнитами.
«L
12
/f
11
IS
16
/J
3L
/2
ff
/7
1 1
/5
/5
/4
| название | год | авторы | номер документа |
|---|---|---|---|
| Аналитические электрические весы | 1974 |
|
SU518636A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСИЛИЙ, | 1973 |
|
SU403974A1 |
| ПРИБОР ДЛЯ ИЗМЕРЕНИЯ КОНЦЕНТРАЦИИ ФЕРРОМАГНИТНЫХ ЧАСТИЦ В ЖИДКОСТЯХ ИЛИ ГАЗАХ | 1971 |
|
SU301107A1 |
| Устройство для автоматического измерения и разбраковки по массе длинномерных изделий | 1977 |
|
SU708168A2 |
| Весы с электромагнитным уравновешиванием | 1984 |
|
SU1216658A1 |
| Датчик углов наклона | 1974 |
|
SU513249A1 |
| ИЗМЕРИТЕЛЬ ВЕСА ТЕЛА, ПОМЕЩЕННОГО В ЗАМКНУТЫЙ | 1973 |
|
SU386286A1 |
| ЭЛЕКТРОННЫЕ ЦИФРОВЫЕ ВЕСЫ | 1999 |
|
RU2162209C1 |
| Весы с электромагнитным уравновешиванием | 1975 |
|
SU559125A1 |
| Автоматические весы с электромагнитным уравновешиванием | 1985 |
|
SU1303837A1 |
5
/5
1Ш
1 LJ rs
I 4-i-xJ 3 jLf И
e
/7
-i 1 I I
