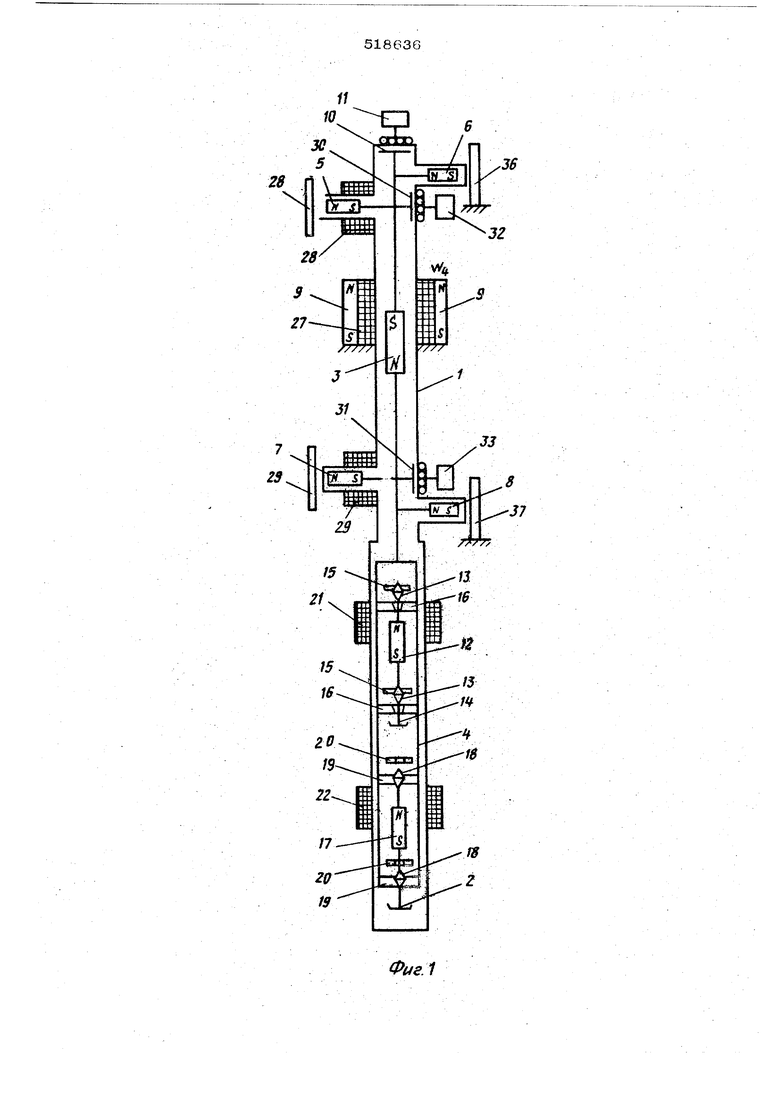
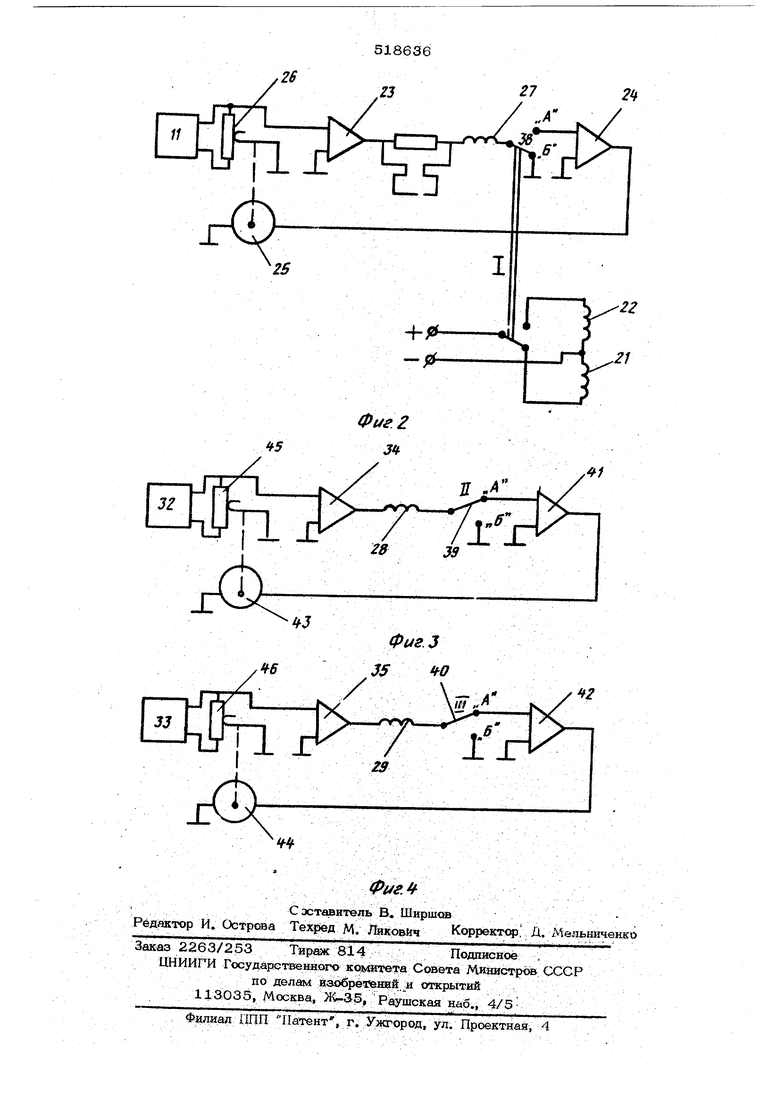
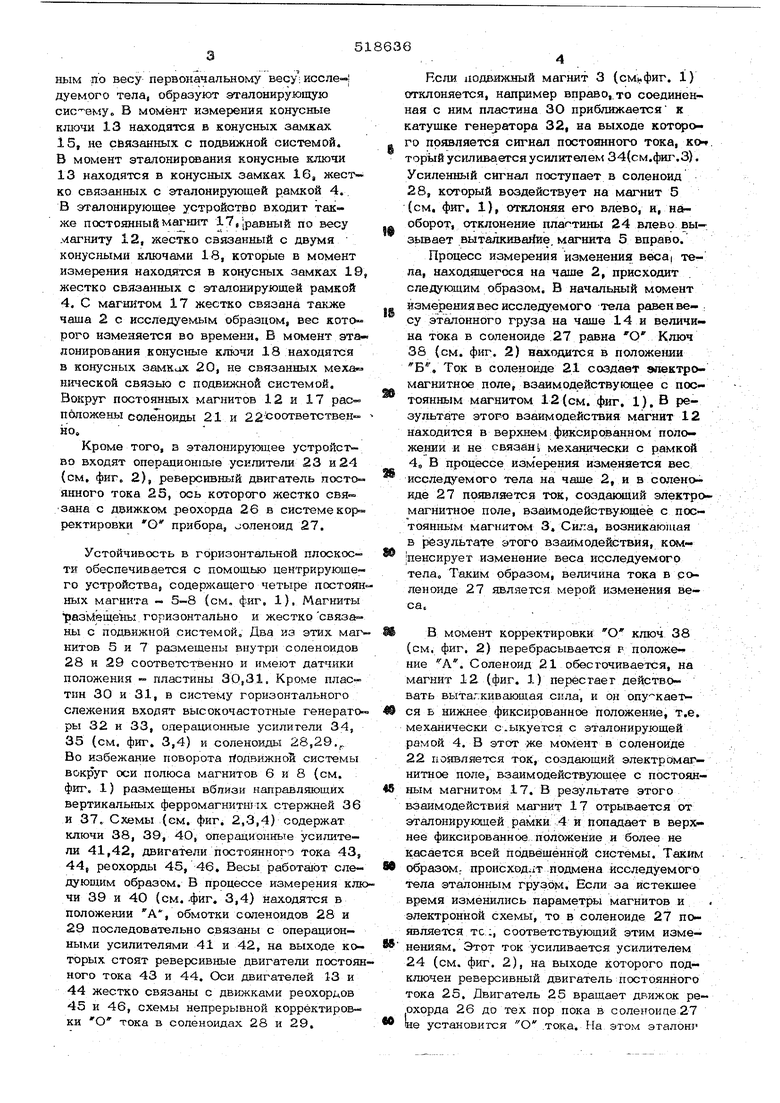
(54) АНАЛИТИЧЕСКИЕ ЭЛЕКТРИЧЕСКИЕ ВЕСЫ ным по весу первоначальному весу; иссле-1 дуемого тела, образуют эталонирующую В момент измерения конусные ключи 13 находятся в конусных замках 15, не обязанных с подвижной системой. В момент эталонирсжания конусные ключи 13 находятся в конусных замках 16, жестко связанных с эталонирующей рамкой 4. В эталонирующее устройство входит также постоянныйi arHHT 17, равныи по весу магниту 12, укестко связанный с двумя конусными ключами 18, которые в момент измере1шя находятся в конусных замках 19 жестко связанных с эталонирующей рамкой 4. С магнитом 17 жестко связана также чаша 2 с исследуемым образцом, вес котО рого изменяется во времени, В момент эта« лонирования конусные ключи 18 находятся в конусных закшах 20, не связанных меха-нической связью с подвижной системой. Вокруг постоянных магнитов 12 и 17 расположены соленоиды 21 и 22соответствен- но. Кроме того, в эталонирующее устройство входят операдионные усилители 23 и 24 (см, фиг. 2), реверсивный двигатель постоянного тока 2S, ось которого жестко свя« зана с движком реохорда 26 в системе кор« ректировки О прибора, vJOлeнoид 27. Устойчивость в горизонтальной плоскости обеспечивается с помощью центрируюшего устройства, содержащего четыре постоян ных магнита - 5-8 {см, фиг, 1), Магниты Tja3Kieiiieiibi. горизонтально и жесткосвяза ны с подвижной системой. Два кэ этих маг нитов 5 и 7 размещены внутри соленоидов 28и 29 соответственно и имеют датчики положения - пластины 3Q,31, Кроме плас- тин 30 и 31, в систему горизонтального слежения входят высокочастотные генерато ры 32 и 33, операционные усилители 34, 35 (см. фиг. 3,4) и соленоиды 28,2&. Во избежание поворота г одвижнои системы вокруг оси полюса магнитов 6 и 8 (см. фиг, 1) размещены вблизи направляющих вертикальных ферромагнитштх стержней 36 и 37. Схемы (см. фиг. 2,3,4) содержат ключи 38, 39, 4О, операционные усилители 41,42, двигатели постоянного тока 43, 44, реохорды 45, 46. Весы работают следуюищм образом. В процессе измерения клю чи 39 и 40 (см. .фиг. 3,4) находятся в положении А, обмотки соленоидов 28 и 29последовательно связаны с операционными усилителями 41 и 42, на выходе ко торых стоят реверсивные двигатели постоя ного тока 43 и 44. Оси двигателей 13 и 44жестко связаны с движками реохордов 45и 46, схемы непрерывной корректировки О тока в соленоидах 28 и 29. Вели подвижный магнит 3 (см,фиг. 1) тклоняется, например вправо,, то соединеная с ним пластина 30 приближается к атушке генератора 32, на выходе котфоо появляется сигнал постоянного тока, ко. торый усиливается усилителем 34(см.фиг.З). Усиленный сигнал поступает в соленоид 28, который воздействует на магнит 5 (см, фиг, 1), отклоняя его влево, и, наоборот, отклонение плаптины 24 влево вы- зьюает выталкивайие. магнита 5 вправо. Процесс измерения изменения веса; тела, находящегося на чаше 2, присходит спедующим. образом. В начальный момент измерения вес исследуемого тела равен ве- : су эталонного груза на чаше 14 и величина тока в соленоиде 27 равна О Ключ 38 (см. фиг. 2) находится в положении Б, Ток в соленоиде 21 создает электромагнитное поле, взаимодействующее с постоянным магнитом 12(см. фиг. 1). В результате этого взаимодействия магнит 12 находится в верхнем фиксированном положении и не связан, механически с рамкой 4, В процессе измерения изменяется вес исследуемого тела на чаше 2, и в соленоиде 27 появляется ток, создающий электромагнитное поле, взаимодействующее с постоянным магнитом 3, , возникающая в результате этого взаимодействия, комиенсирует изменение веса исследуемого тела Таким образом, величина тока в соленоиде 27 является мерой изменения веса,. , . В момент корректировки О ключ 38 (см. фиг. 2) перебрасывается р положе ние А. Соленоид 21 обесточивается, на магнит 12 (фиг. 1) перестает действо- вать вытагкивающая сила, и он опукается Б нижнее фиксированное положение, т.е. механически с.ыкуется с эталонирующей рамой 4. В этот же момент в соленоиде 22 появляется ток, создающий электрЬмаг- , нитное поле, взаимодействующее с постоянным магнитом 17. В результате этого взаимодействия магнит 17 отрывается от эталонирующей рамки 4 и попадает в верхнее фиксированное Положение и более не касается всей подвёщенной системы. Таким образом происходлт подмена исследуемого тела эталонным грузом. Если за йстекщее время изменились параметры магнитов и электронной схемы, то в соленоиде 27 появляется тс:, соответствующий этим изменениям. Этот ток усиливается усилителем 24 (см. фиг. 2), на выходе которого подключен реверсивный двигатель постоянного тока 25. Двигатель 25 вращает движок реохорда 26 до тех пор пока в соленоиде 27 не установигся О .тока. На этом аталонр
рование заканчивается и ключ 38 перево:дится в положение Б. Соленоид 22, обесточивается, магнит 17 (см. фиг. 1) с исследуемым телом стыкуется с эталонирун щей рамой 4, а в соленоиде 21 появляерся ток, электромагнитное поле которого Iотрывает магнит 12 с эталоннь м грузом от эталонирующей рамки 4 и он фиксируе1 |ся в верхнем положении до следующего эталонирования.
Формула изобретения
Аналитические электрические весы, со.держащие замкнутый сосуд, внутри расположена подан«ная система иэ жест-
ко соединенных между собой грузовой чаши и основного постоянного магнита, размещенного внутри соленоида, установленного снаружи замкнутого сосуда, центрируюшее приспособление и систему электромаг нитного уравновешивания с рогис трирующим прибором, отличающиеся тем, чт( с целью повышения точности, они снабжены эталонирующей рамкой с четырьмя конусными замками, жестко связанной о п- движной сис;ТРеМОЙ, и двумя дополнительными ПОСТО1Шными магнитами, жестко связанными с конусными ключами, к одному из jfOTopbix подвешена грузовая чаша, с. к др)тому - допоянительная грузовая 4aiua. и ра.змещенными внутри двух допогаштельных соло1юцдов, устакопленных cнapvжи замкнутот-о сосуда.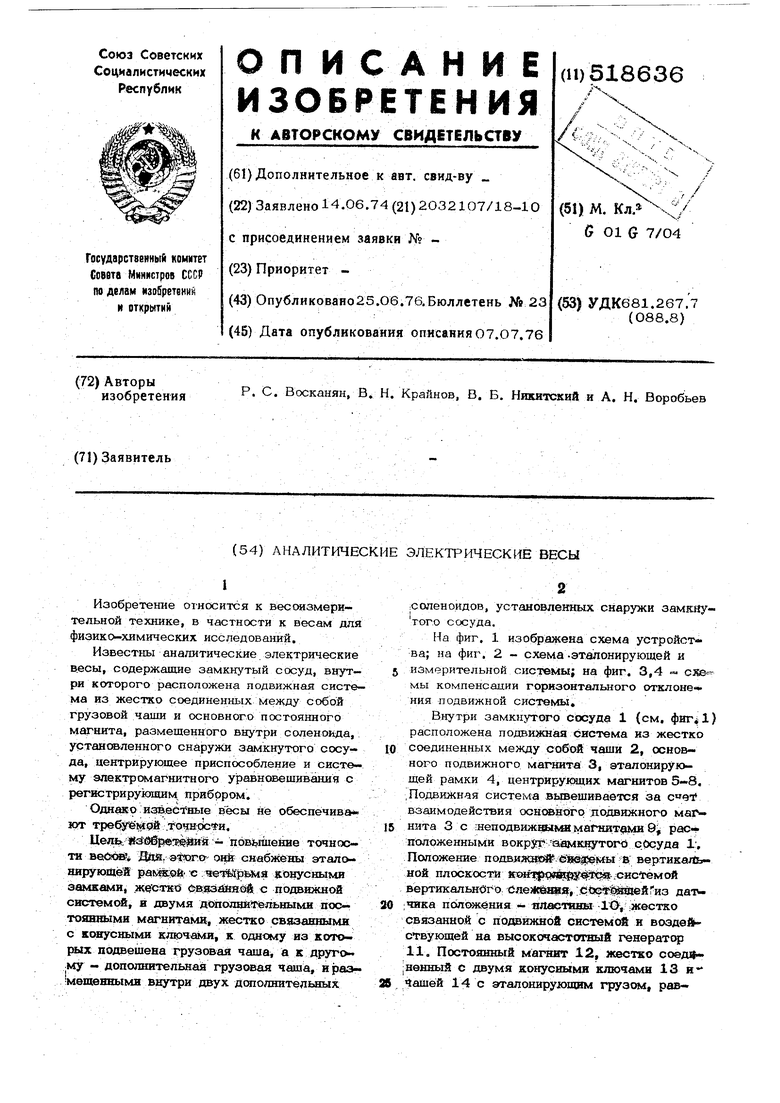
| название | год | авторы | номер документа |
|---|---|---|---|
| Аналитические весы с электромагнитнымуровновешиванием | 1974 |
|
SU509789A1 |
| Весоизмерительное устройство | 1986 |
|
SU1315824A1 |
| Устройство для измерения намагниченности жидких и твердых тел | 1974 |
|
SU600489A1 |
| СПОСОБ ЗАПУСКА МИКРО- И НАНОСПУТНИКОВ И УСТРОЙСТВО НА ОСНОВЕ МИКРОПРОЦЕССОРНОЙ МАГНИТОИНДУКЦИОННОЙ СИСТЕМЫ ДЛЯ ОСУЩЕСТВЛЕНИЯ ЗАПУСКА | 2015 |
|
RU2603441C1 |
| Устройство контроля стабильности состава оптически прозрачных сред | 1989 |
|
SU1718054A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ИЗМЕНЕНИЯ СОСТОЯНИЯ ВРАЩАЮЩЕГОСЯ ВОЛЧКА (ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ ГЕОМЕТРИЗАТОР) | 1999 |
|
RU2172501C2 |
| СПОСОБ ФИКСАЦИИ И ПРИВОДА РИГЕЛЯ ЗАМКА И МАГНИТОЭЛЕКТРИЧЕСКИЙ ЗАМОК (ВАРИАНТЫ) | 2010 |
|
RU2487225C2 |
| Прибор для определения удельного веса твердых тел | 1939 |
|
SU61074A1 |
| Способ бесконтактного контроля теплофизических характеристик материалов | 1990 |
|
SU1778658A1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ТЕПЛОФИЗИЧЕСКИХ ХАРАКТЕРИСТИК МАТЕРИАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2011977C1 |