(54) МЕХАНИЗМ ЗАГРУЗКИ ШТУРВАЛА ЛЕТАТЕЛЬНОГО АППАРАТА
обойму упора-сигнализатора, а другой на внутренний торец корпуса загружателя, причем усилие обжатия пружины упора-сигнализатора выбрано из условия превышения усилия полного обжатия загружающей пружины.
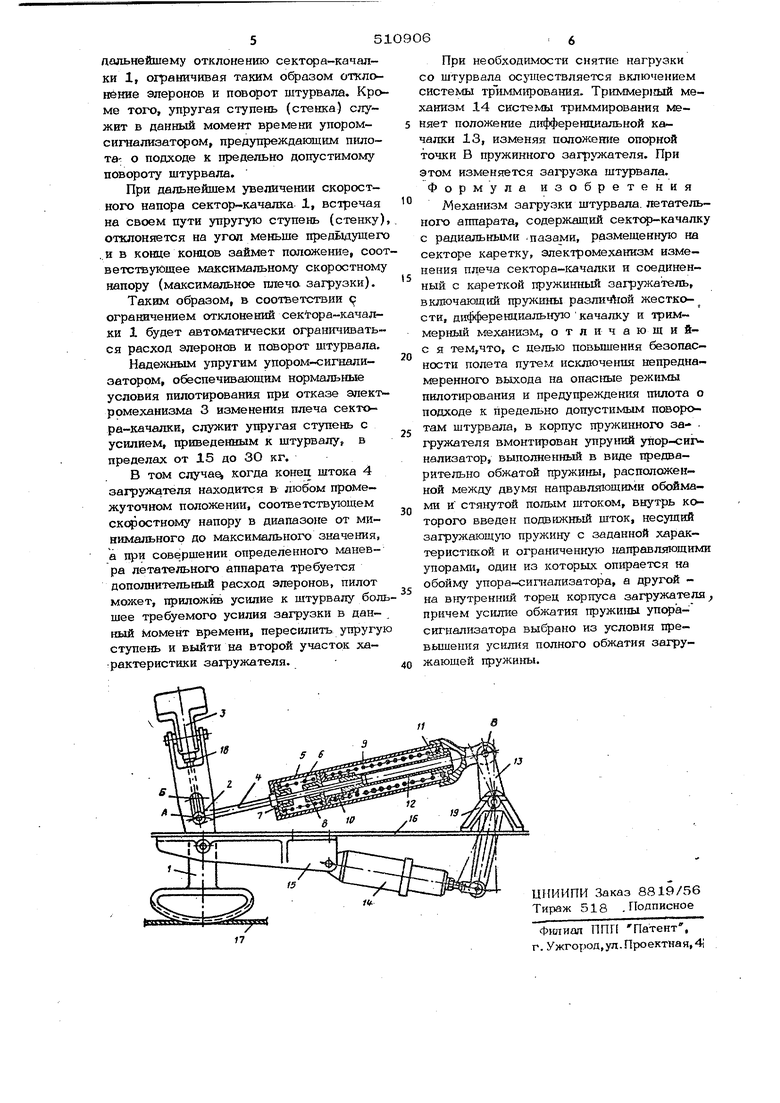
На чертеже изображен механизм загрузки штурвала летательного аппарата.
Механизм загрузки штурвала летательного аппарата включает в себя сектор-качалку 1 с радиальными пазами, размшденную на секторе каретку 2, элек- омеханизм 3 изменения плеча сект а-качалки, соединенный с кареткой 2 пружинный загружатель , состоящий из подвижного штока 4, корпуса 5 с вмонтированными в него загружающей пружиной 6, заключенной между двумя жесткими направляющими упорами 7 и 8, и пружиной 9, расположенной между двумя направляющими обоймами 10 и 11 и стянутой полым штоком 12, внутри которог установлен подвиисный щток 4}-дифференциальную качалку 13, триммерный механизм 14.
Загружающая пружина 6 имеет характеристику, соответствующую условиям пилотирования, а пружина 9 установле11а с предварительным обжатием, превьш ающим усилие полного обжатия загружающей пружины 6, приведенное к штурвалу, в пределах 15-30 кг, образуя упру гую ступень(стенку) в средней части хода заг ужателя, служащую упругим упором-сизгнализатором.
Сектор-качалка 1 шарнирно закреплен в кронштейне 15, установленном на корпусе 16 летательно1Х аппарата.
Один конец сектора-качалки 1 выполнен, например, в виде сектора, в канавк которого закреплены тросы 17, идущие к органам управления (напр1Ш1ер, к элеронам и штурвалу).
Другой конец сектора-качалки 1 выполнен полым, коробчатого сечения, с продольными сквозными пазами, расположенными в перпендикулярных плоскостях радиально от оси вращения. На этом конце сектора-качалки закреплен электромеханизм 3, силовой шток 18 KOTopoix) введен в полую часть качалки и соединен с кареткой 2, имеющей возможность перемещения радиально в продольных сквозных пазах, расположенных в плоскостях, параллельных плоскости чертежа.
К каретке 2 щарнирно подсоединен шток 4 прулсинного загружателя, проходяший через продольный сквозной паз, расположенный в плоскости, перпендикулярной пЯбскости чертежа.
Корпус 5 пружинного загружателя щарнирно соединен с одним коьщом дифференциальной качалки 13, закрепленной, в свою очередь, шарнирно в кронштейне 19, установленном на корпусе летательного аппарата.
К другому концу дифференциальной качалки 13 шарнирно подключен триммерный механизм 14, закрепленный щарнирно относительно корпуса 16.
При взлете и на посадке, когда скорость полета относительно мала, электромеханизм 3 по сигналу скоростного напора перемешает конец штока 4 пружин - HOIXJ загрзжателя в положение А (малое плечо загрузки). В этом случае секторкачашш 1, отклоняясь пропорционально углам поворота штурвала, обжимает только пружину 6, характеристика которой обеспечивает загрузку штурвала, соответствующую условиям пилотирования, а ее ход - максимальный расход элеронов.
По мере увеличения скорости (скоростного напора), при на боре высоты и в режиме крейсерского полета, конец штока 4 загтружателя с помощью электромеханизма 3 и каретки 2 перемешается в пазах сектора-качалки 1, занимая ряд промежуточных положений.
Перемещение конца штока 4 загружателя из взлетного положения А в положение Б ведет к увеличению загрузочноIX) плеча ц. как следствие - к увеличению хода загружателя при равных углах отклонения рулевой поверхности и поворота штурвала.
Установленная упругая ступень (стенка), выполненная в виде предварительно обжатой пружины 9, ограничивает часть хода загружателя, подключенного параллельно проводке управления элеронами, что уменьшает расход элеронов и ход штурвала.
В режиме ограничения механизм работает следующим образом. При скорости ном напо|зе, соответствующем взлетному режиму, полному ходу штурвала соот ветствует полное обжатие пружины 6.
В этом случае сектор-качалка 1, отклоняясь пропорционально углу поворота штурвала, переместится из нейтрального положения в положение, соответствующее повороту штурвала при данном скоростном напоре и встретит упругую ступень (стенку), которая препятствует