Изобретение относится к авиационной технике, может быть использовано в системах управления летательных аппаратов и предназначено для ручного управления учебно-тренировочных самолетов.
Известна система ручного управления тяжелого пассажирского самолета, содержащая в продольном канале управления два механически связанных между собой штурвала, которые посредством механической проводки с механизмом изменения передаточного числа связаны с гидроприводом аэродинамических поверхностей. Загрузка штурвалов осуществляется посредством электрогидравлического устройства, содержащего датчики усилий, размещенные в соответствующих штурвалах, блок формирования управляющего сигнала загрузки, вход которого связан со входом электрогидропривода, который отклоняет штурвалы на угол, пропорциональный величине усилия, приложенного к штурвалу [2]
Известна система управления летательного аппарата, содержащая рычаг управления, кинематически связанный через электромеханизм триммирования и автомат регулировки загрузки с пружинным загрузочным устройством, аэродинамический орган управления, кинематически связанный с выходом силового привода, вход которого через дифференциальную качалку и механическую проводку с автоматом регулировки управления соединен с рычагом управления, кнопку триммирования, расположенную на рычаге управления и электрически связанную с электромеханизмом триммирования, рулевую машинку, выход которой подсоединен ко второму плечу дифференциальной качалки, датчики параметров движения летательного аппарата, подключенные ко входам вычислителя, вход которого соединен со входом рулевой машинки [3]
По технической сущности наиболее близкой к предлагаемой системе является система ручного управления учебно-тренировочного самолета, содержащая в продольном канале механически связанные между собой две ручки управления, которые посредством механической проводки кинематически связаны с механизмом изменения передаточного числа, гидроприводом руля высоты, пружинным устройством загрузки и механизмом эффекта триммирования, который электрически связан с кнопками триммирования, размещенным в рукоятках соответствующих ручек управления [1]
Известное решение имеет следующие недостатки:
не позволяет в процессе учебно-тренировочных полетов отрабатывать действия летчика-курсанта в условиях введения отказов и не обеспечивает имитацию критических режимов полета при одновременном сохранении возможности прекращения указанных режимов и безопасного продолжения нормального полета;
не позволяет производить ознакомление летчиков с особенностями пилотажных характеристик различных самолетов и их модификаций с отработкой соответствующей техники пилотирования;
не обеспечивает однозначного приоритета управления между инструктором и курсантом, т. к. существующий приоритет управления основан на пересиливании друг друга.
Вышеприведенные недостатки не позволяют выполнить требования, которые предъявляются к системам управления современных учебно-тренировочных самолетов.
Задачей изобретения являются расширение функциональных возможностей системы управления и повышение безопасности полета.
Для решения указанной задачи в известную систему управления учебно-тренировочного самолета, содержащую в продольном канале две механически соединенные между собой ручки управления летчика-инструктора и летчика-курсанта и кинематически связанные с механизмом изменения передаточного числа гидроприводом руля высоты, пружинным устройством загрузки и механизмом эффекта триммирования, который электрически связан с кнопками триммирования, размещенными в соответствующих ручках управления, дополнительно введено электрогидравлическое устройство загрузки, состоящее из электрогидропривода, перемещающего ручки управления, датчиков усилий, установленных на этих ручках, и блока управления и контроля, вход которого электрически связан с датчиками усилий, кнопками триммирования и вычислителем репрограммирования характеристик устойчивости и управляемости, а выход с электрогидроприводом и механизмом эффекта триммирования. Кроме того, введен второй электрогидропривод, электрически связанный с вычислителем репрограммирования характеристик устойчивости и управляемости и кинематически связанный с центрирующей его выходной шток пружиной и дифференциальной качалкой, размещенной между механизмом изменения передаточного числа и гидроприводом руля высоты. В рукоятке ручки летчика-инструктора размещены два переключателя с двумя перекидными контактными парами каждый, один из которых связан с датчиком усилий и кнопкой триммирования ручки управления летчика-курсанта, а второй с гидроклапанами соответствующих электрогидроприводов и с собственной кнопкой триммирования. Одна перекидная контактная пара каждого переключателя связана с соответствующей кнопкой триммирования с возможностью ее подключения или к блоку управления и контроля, или к механизму эффекта триммирования, а вторая контактная пара -соответственно с датчиком усилий и гидроклапанами вышеуказанных электрогидроприводов.
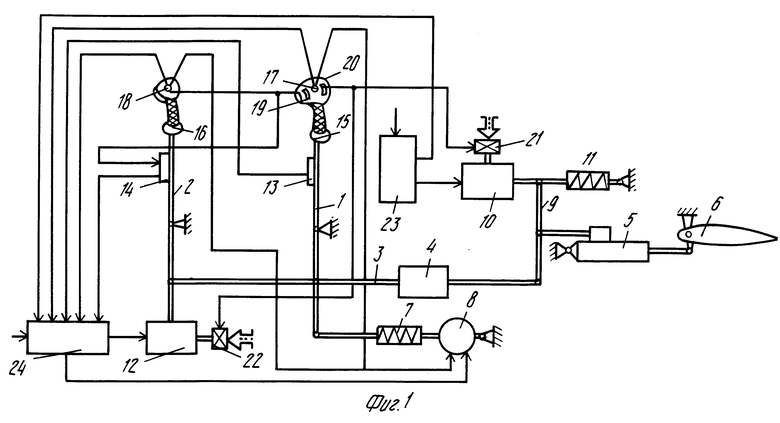
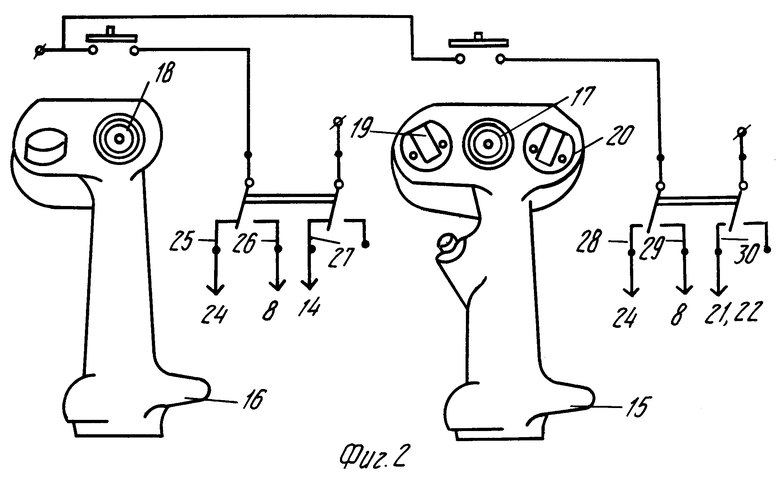
На фиг. 1 представлена структурная схема системы ручного управления учебно-тренировочного самолета; на фиг. 2 схема электрической связи двух переключателей с элементами системы управления.
Система ручного управления /фиг. 1/ в продольном канале содержит жестко соединенные между собой ручку управления 1 летчика-инструктора и ручку управления 2 летчика-курсанта, которые посредством механической проводки 3 кинематически связаны с механизмом изменения передаточного числа 4, гидроприводом 5 руля высоты 6, пружинным устройством загрузки 7, механизмом эффекта триммирования 8, дифференциальной качалкой 9, электрогидроприводом 10, пружиной 11 и электрогидроприводом 12 загрузки ручек управления.
Ручки управления 1 и 2 содержат датчики усилий соответственно 13 и 14, рукоятки 15 и 16, в которых размещены кнопки триммирования 17 и 18. Кроме того, в рукоятке 15 летчика-инструктора размещены два полозковых переключателя 19 и 20 с двумя перекидными контактными парами каждый.
Для отключения электрогидроприводов 10 и 12 предусмотрены соответствующие гидроклапаны 21 и 22, электрически связанные с переключателем 20.
В состав системы управления входит вычислитель 23 репрограммирования характеристик устойчивости и управляемости, формирующий управляющие сигналы для электрогидропривода 10 и блока управления и контроля 24. Вход блока управления и контроля также электрически связан с датчиками усилий 13 и 14 и кнопками триммирования 17 и 18, а выход с электроприводом 12 и механизмом эффекта триммирования 8.
Кнопка триммирования 18 /фиг2/, размещенная в рукоятке 16 летчика-курсанта, выполнена с возможностью подключения ее или к блоку управления и контроля 24, или к механизму эффекта триммирования 8 посредством соответствующих контактных пар 25 или 26 переключателя 19, расположенного в рукоятке 15 летчика-инструктора. Вторая контактная пара 27 этого переключателя отключает цепь питания датчика усилий 14.
Кнопка триммирования 17 летчика-инструктора также подключена к блоку управления и контроля и к механизму эффекта триммирования посредством соответствующих контактных пар 28 и 29 переключателя 20, а вторая контактная пара 30 этого переключателя связана с гидроклапанами 21 и 22, отключающими электрогидроприводы 10 и 12 от гидросистемы.
Система ручного управления работает следующим образом.
В учебно-тренировочном полете при имитации различных режимов управления ручки управления 1 и 2 подключены к электрогидравлическому устройству загрузки. При этом усилия, прилагаемые, например, летчиком-курсантом к рукоятке 16, воспринимаются датчиком усилий 14, электрический сигнал которого подается на вход блока управления и контроля 24. Одновременно вычислителем 23 репрограммирования характеристик устойчивости и управляемости формируются управляющие электрические сигналы в соответствии с параметрами полета и конкретного режима управления и подаются на вход блока управления и контроля 24 и на вход электропривода 10.
С блока управления и контроля электрический сигнал подается на вход электрогидропривода 12, выходной шток которого перемещает ручки управления 1 и 2 на величину, пропорциональную этому сигналу, имитируя тем самым усилие, прилагаемое курсантом. При этом посредством механической проводки 3 через механизм изменения передаточного числа 4 перемещение ручек управления передается на дифференциальную качалку 9, второй конец которой перемещается под воздействием выходного штока электрогидропривода 10. Таким образом, на дифференциальной качалке 9 суммируются перемещения от ручек управления и привода системы улучшения характеристик устойчивости и управляемости и передаются на гидропривод 5 руля высоты 6, который отклоняется в соответствующую сторону и на требуемую величину.
Усилия, развиваемые электрогидроприводом 12, значительно больше максимальных усилий пружинного механизма загрузки, поэтому характеристики последнего не сказываются на точности перемещения и работе ручек управления.
Если требуется в процессе полета отключить от управления летчика-курсанта, то летчик-инструктор должен нажать на полозковый переключатель 19 и посредством размыкания контактной пары 27 отключить датчик усилий 14, размещенный в ручке летчика-курсанта. Одновременно с этим размыкается контактная пара 25 и замыкается контактная пара 26, тем самым кнопка триммирования 18 отключается от блока управления и контроля и подключается непосредственно к механизму эффекта триммирования. Если же снова потребуется подключить летчика-курсанта к управлению самолетом, то летчик-инструктор должен вернуть полозковый переключатель в исходное положение. Таким образом, осуществляется приоритет управления между инструктором и курсантом.
При возникновении аварийной ситуации летчик-инструктор может отключить электрогидравлическое устройство загрузки и систему улучшения устойчивости и управляемости, перейти на основную механическую систему управления и посадить самолет. Для этого он должен нажать на полозковый переключатель 20, и при размыкании контактной пары 30 срабатывают гидроклапаны 21 и 22 и отключают электрогидроприводы 10 и 12 от гидросистемы. Одновременно с этим кнопка триммирования 17 отключается от блока управления и контроля и подключается к механизму эффекта триммирования. По этой же команде отключения блок управления и контроля посылает сигнал автотриммирования на механизм эффекта триммирования. Тем самым обеспечивается безударный переход от режима репрограммирования к основному простому режиму управления.
После отключения гидросистемы оба электрогидропривода 10 и 12 переходят на холостой режим работы режим кольцевания, а пружина 11 центрирует выходной шток электрогидропривода 10. В режиме кольцевания выходные штоки электрогидроцилиндров свободно перемещаются и тем самым начинают выполнять положительную роль демпфирующих устройств загрузки ручек управления. Таким образом, после срабатывания переключателя 20 остается действующей надежная чисто механическая система ручного управления, т.е. обе ручки управления загружены пружинным механизмом загрузки 7, а механизм эффекта триммирования связан только с кнопками 17 и 18, и дальнейшее управление самолетом может производиться как летчиком-инструктором, так и летчиком-курсантом.
Представленная система ручного управления учебно-тренировочного самолета позволяет варьировать характеристиками устойчивости и управляемости самолета. Репрограммируются следующие характеристики устойчивости и управляемости:
градиент расход ручки по перегрузке 
градиент усилий на ручке по перегрузке 
зависимость усилия на ручке управления по тангажу от ее перемещения в произвольной форме /излом зависимости pх, люфт, трение, демпфирование, стенки по усилиям при ny > nyдоп; α>αдоп предупредительная тряска ручки и т.д./;
балансировочная зависимость отклонения руля высоты от скорости /δb(Vi)/ произвольной формы;
время срабатывания tсраб и заброс по перегрузке  ;
;
зависимость продольной перегрузки от вертикальной nx f(ny) и др.
Таким образом, техническим результатом, который может быть получен при осуществлении изобретения, является то, что данная система ручного управления позволяет в процессе учебно-тренировочных полетов с помощью электрогидравлического устройства загрузки и системы улучшения характеристик устойчивости и управляемости с предложенными связями между ними отрабатывать действия летчика-курсанта, имитируя различные режимы полета и сохраняя при возникновении аварийных ситуаций возможность безопасного продолжения нормального полета с использованием простейшей и надежной системы ручного управления.
Изобретение позволяет имитировать пилотажные характеристики различных самолетов, т.е. позволяет производить ознакомление летчиков-курсантов с особенностями техники пилотирования этих самолетов.
Во всех вышеуказанных режимах выполняется одно из основных требований учебного процесса "делай, как я", т.е. летчик-инструктор в любой момент может отключить курсанта и показать правильную технику пилотирования в каждом конкретном случае.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РУЧНОГО УПРАВЛЕНИЯ САМОЛЕТА | 1994 |
|
RU2089447C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОВОРОТОМ КОЛЕС ПЕРЕДНЕЙ ОПОРЫ ШАССИ | 1992 |
|
RU2042575C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1992 |
|
RU2077028C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235042C1 |
| ЛЕГКИЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2003 |
|
RU2235044C1 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235043C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ЛЕГКОГО УЧЕБНО-БОЕВОГО САМОЛЕТА | 2002 |
|
RU2203200C1 |
| УЧЕБНО-ТРЕНИРОВОЧНЫЙ КОМПЛЕКС АВИАЦИОННЫЙ | 2004 |
|
RU2250511C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ С МУЛЬТИПЛЕКСНОЙ СИСТЕМОЙ ИНФОРМАЦИОННОГО ОБМЕНА | 2001 |
|
RU2174485C1 |
| ПОЛУАВТОМАТИЧЕСКАЯ СИСТЕМА ПРОДОЛЬНОГО УПРАВЛЕНИЯ САМОЛЕТОМ | 2006 |
|
RU2316450C1 |
Использование: в системах управления летательных аппаратов. Сущность изобретения: система ручного управления учебно-тренировочного самолета с расширенными функциональными возможностями содержит в продольном канале жестко соединенные между собой ручки управления летчика-инструктора и летчика-курсанта, которые кинематически связаны с механизмом изменения передаточного числа, гидроприводом руля высоты, пружинным устройством загрузки и механизмом эффекта триммирования, который, в свою очередь, электрически связан с кнопками триммирования, размещенными в каждой ручке управления. В состав системы дополнительно введены вычислитель репрограммирования характеристик устойчивости и управляемости, электрогидравлическое устройство загрузки, содержащее электропривод, перемещающий ручки управления, датчики усилий, установленные на этих ручках, и блок управления и контроля, вход которого электрически связан с датчиками усилий, кнопками триммирования и вычислителем репрограммирования характеристик устойчивости и управляемости, а выход - с электроприводом и механизмом эффекта триммирования. Кроме того, введен второй электропривод, электрически связанный с вычислителем репрограммирования и кинематически с центрирующей его выходной шток пружиной, и дифференциальной качалкой, размещенной между механизмом передаточного числа и гидроприводом руля высоты. В ручке летчика-инструктора размещены два переключателя с двумя перекидными контактными парами каждый, один из которых связан с датчиком усилий и кнопкой триммирования ручки управления летчика-курсанта, а второй - с гидроклапанами соответствующих электрогидроприводов и с собственной кнопкой триммирования. 1 з.п. ф-лы, 2 ил.