(54) ПНЕЗМАТИЧЕСКОЕ УСТРОЙСТВО ПЕРЕМЕШЕНИЕМ УПРАВЛЕНИЯ ПОЗИЦИОННЫМ РАБОЧЕГО ОРГАНА
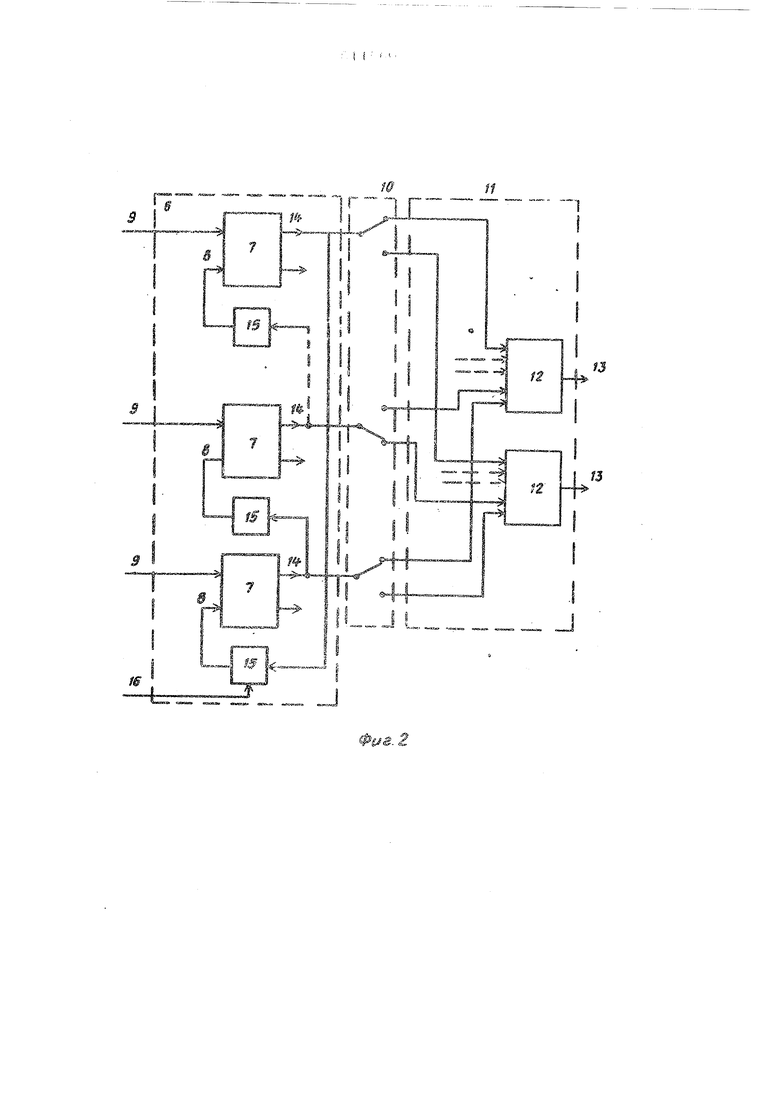
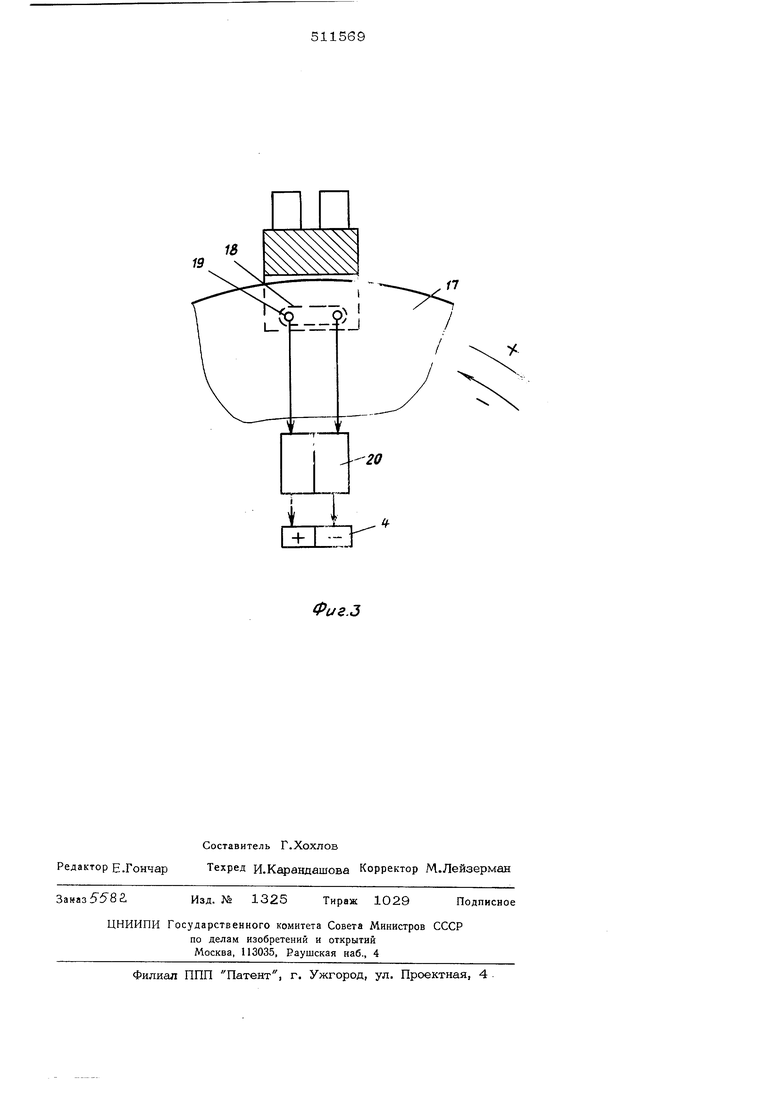
фиг. 2 - схема блока переключения позиций; на фиг. 3 - схема направления датчик
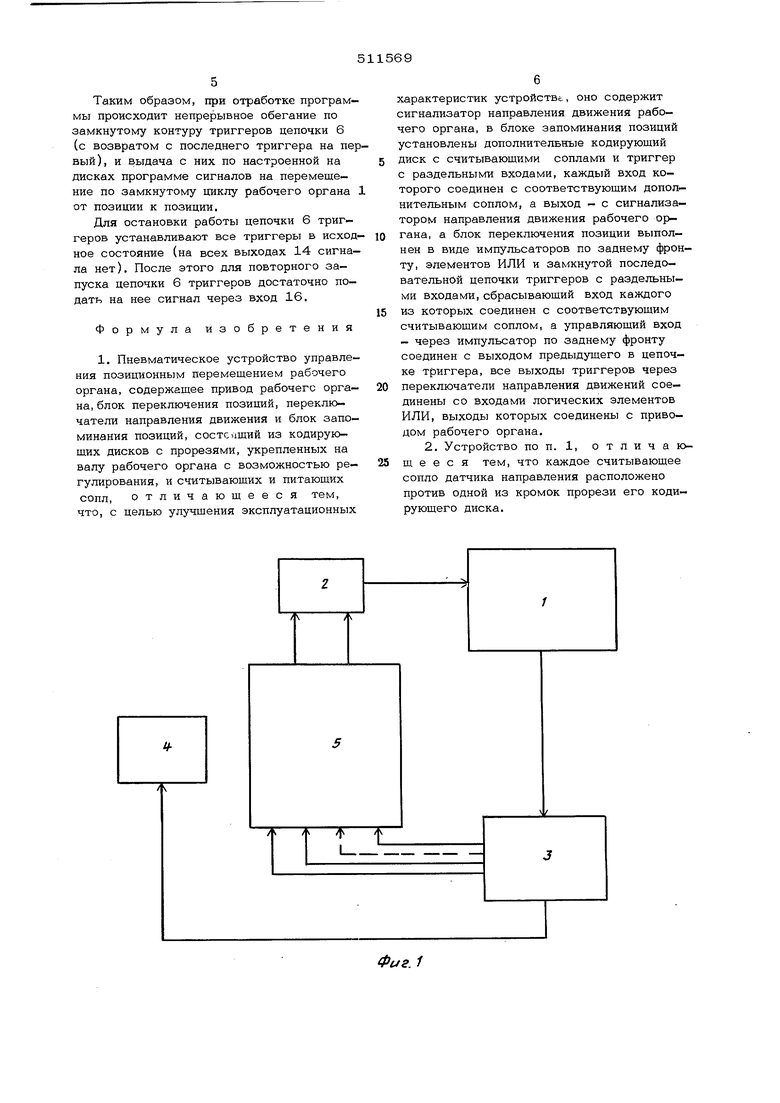
Пневматическое устройство управления позиционным перемещением рабочего органа содержит рабочий орган 1, привод 2 рабочего органа, блок 3 запоминания позиций, сигнализатор 4 направления движения рабочего органа и блок 5 переключения позиций.
Блок 5 переключения позиций содержит замкнутую последовательную цепочку 6 триггеров с разрядными входами 7 (по числу позиций) с входами и выходами 8 и 9, переключатели 10 направления движения, например, в виде программного барабана, и собирательную схему 11 в виде элементов ИЛИ 12 с выходами 13 для каждого направления.
Выходы 14 каждого триггера соединены с управляющим входом последующего триггера через импульсатор по заднему фронту 15, первый из импульсов имеет запускающий вход 16.
Датчик направления содержит кодирующий диск 17 с прорезью 18, считывающие сопла 19 и 20, триггер 20 с раздельными входами.
Пневматическое устройство управления позиционным перемещением рабочего органа работает cлeдvющим образом.
Перед работой устройство настраивают
(обучают), для чего рабочий орган 1 переводят от позиции к позиции и запоминают как координаты этих позиций, так и направления движений к ним путем соответственно фиксации кодирующих дисков блока 3 запоминания позиций и установки по сигнализатору 4 направления движения переключателей 10 направления движения.
В процессе обучения направлению движения при каждом переходе рабочего органа 1 от предыдущей позиции к последующей диск 17 датчика направления (см. фиг. 3) в предыдущей позиции устанавливают прорезью 18 против двух сопл 19 (приводят датчик к нулевому состоянию), а в последующей позиции оценивают по сигнализатору 4 направления движения,в какую сторону отклонился кодирующий диск 17. При перемещении прорези 18, например вправо от нулевого положения, сопла 19 перекрываются диском 17 в одном порядке, а при перемещении влево в другом (обратном) порядке. Сигналь) со считывающих сопл 19 воздействуют на входы триггера 20, за выходами котор )го следит сигнализатор 4 направления движения.
4
Для отработки программы, настроенной с помощью кодирующих дисков для запоминания позиции и кодирующего диска 17 датчика направлени, запускают через вход
16 триггерную цепочку 6 блока 5 переключения позиций (см. фиг. 2), предварительно установив все триггеры 7 на ноль (соединения на чертеже не показаны), т. а. на всех выходах 14 сигнала нет.
Первый от входа 16 импульсатор 15
активизирует через управляющий вход 8 первый триггер 6. На его выходе 14 появит.ся сигнал, который через один из переключателей 10 направления и собирательную
схему 11 попадет на один из двух ее выходов 13 и далее к приводу 2, который начнет перемещать рабочий орган 1 в соответ- ствуюш.-ю положению этого переключателя 10 направления сторону. Связанный с рабочим органом 1 блок 3 запоминания позиций (см. фиг. 1) прорезью своего первого кодирующего диска будет приближаться к соответствующему этому диску считывающему соплу.
При этом в процессе движения рабочего
органа 1 считывающие сопла других кодирующих дисков не могут оказать влияния на другие триггеры в цепочке 6 триггеров, даже если мимо сопл пройдут прорези соответствующих им кодирующих дисков, запрограммированных на другие позиции, так как в цепочке 6 все триггеры 7, кроме соответствующего данному движению (в этом случае первому), не активизированы.
Когда прорезь первого кодирующего диска достигнет соответствующего ему считывающего сопла, возникнет сигнал остановки на сбрасывающем выходе 9 первого триггера цепочки 6. Первый триггер вернется в исходное состояние, на его выходе 14 сигнал исчезнет и привод 2 остановится в заданной первым кодирующим диском позиции, закончив первое движение.
Исчезновение сигнала на выходе 14 первого триггера цепочки 6 приведет одновременно или с задержкой (на чертеже элементы задержки не показаны) к активации второго триггера цепочки 6 через второй им-
пульсатор 15. В результате появится сигнал на выходе 14 второго триггера, и привод 2 начнет второе движение, перемещая рабочий орган 1 ко второй настроенной позиции, при достижении которой второй ко-
дирующий диск для запоминания позиций своей прорезью придет к соответствующему ему считывающему соплу. Это вызовет остановку рабочего органа 1 во второй позиции и подготовку к запуску третьего
движения и т. д. Таким образом, при отработке программы происходит непрерывное обегание по замкнутому контуру триггеров цепочки 6 (с возвратом с последнего триггера на пе вый), и выдача с них по настроенной на дисках программе сигналов на перемещение по замкнутому циклу рабочего органа от позиции к позиции. Для остановки работы цепочки 6 триггеров устанавливают все триггеры в исход ное состояние (на всех выходах 14 сигнала нет). После этого для повторного запуска цепочки 6 триггеров достаточно подать на нее сигнал через вход 16. Формула изобретения 1. Пневматическое устройство управления позиционным перемещением рабочего органа, содержащее привод рабочего органа, блок переключения позиций, переключатели направления движения и блок запоминания позиций, состсищий из кодирующих дисков с прорезями, укрепленных на валу рабочего органа с возможностью регулирования, и считывающих и питающих сопл, отличающееся тем, что, с целью улучщения эксплуатационных характеристик устройств, оно содержит сигнализатор направления движения рабочего органа, в блоке запоминания позиций установлены дополнительные кодирующий диск с считывающими соплами и триггер с раздельными входами, каждый вход которого соединен с соответствующим дополнительным соплом, а выход - с сигнализатором направления движения рабочего ор- гана, а блок переключения позиции выполнен в виде импульсаторов по заднему фронту, элементов ИЛИ и замкнутой последовательной цепочки триггеров с раздельными входами, сбрасывающий вход каждого из которых соединен с соответствующим считывающим соплом, а управляющий вход - через импульсатор по заднему фронту соединен с выходом предыдущего в цепочке триггера, все выходы триггеров через переключатели направления движений соединены со входами логических элементов ИЛИ, выходы которых соединены с приводом рабочего органа. 2. Устройство по п. 1, отлича ющ е е с я тем, что каждое считывающее сопло датчика направления расположено против одной из кромок прорези его кодирующего диска.
| название | год | авторы | номер документа |
|---|---|---|---|
| Дозатор жидкости | 1989 |
|
SU1703979A1 |
| Система связи электронно-вычислительной машины с пневматическими регуляторами | 1985 |
|
SU1341617A1 |
| Способ контроля работы сеялки | 1984 |
|
SU1197575A1 |
| Пневматическое устройство для определения экстремального сигнала | 1980 |
|
SU920749A1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ И ПНЕВМАТИЧЕСКИЙ СКОРОСТЕМЕР ДЛЯ ТЕЛА | 2010 |
|
RU2421733C1 |
| Устройство для автоматического регулирования концентрации растворов | 1980 |
|
SU935885A1 |
| Пневматическое устройство управления | 1980 |
|
SU894670A1 |
| Устройство для контроля пневматических приборов | 1980 |
|
SU934226A1 |
| Система управления буровым станком | 1982 |
|
SU1065585A2 |
| Устройство для измерения усилий | 1986 |
|
SU1404831A1 |
/V 7
Фиг. 1
19
Фиг.З
П
