Способ измерения скорости и пневматический скоростемер для тела относится к способам и устройствам, использующимся при навигации летательных аппаратов, при измерении ускорения и скорости.
Известен способ измерения скорости объекта путем интегрирования ускорения, измеренного инерционной массой из Д.И.Агейкин, М.А.Балашов, С.П.Колосов и др. Руководство по проектированию элементов и систем автоматики. Вып.2 под ред. Б.Н.Петрова, Гос. Изд. Оборонпром, М., 1959, с.5-26. Недостатком известного способа является малая точность измерения вследствие применения механических передач.
Известен способ измерения ускорения инерционной массой, с силовой компенсацией ускорения моментом электродвигателя и его суммирования на оси с моментом обратной связи из Г.Г.Раннев, А.П.Тарасенко. Методы и средства измерений. М.: Издательский центр Академия, 2008, с.221. Недостатки: дополнительное преобразование аналогового сигнала, зависимость амплитуды выходного сигнала от измеряемой скорости вращения, что затрудняет измерение малых скоростей.
Известен также способ измерения скорости, принятый за прототип, с помощью интегрирующего акселерометра из Д.А.Браславский. Приборы и датчики летательных аппаратов. М.: Машиностроение, 1970, с.354-357.
В известном способе применено интегрирование ускорения, измеряемого инерционной массой в виде маятника, в полном диапазоне ускорения, причем интегрирование ускорения происходит вне контура обратной связи с помощью электродвигателя, угол поворота которого является выходом устройства.
Недостатками известного способа являются небольшая точность измерения ускорения и преобразование его в скорость электродвигателем, а также процедура измерения ускорения во всем диапазоне, а не отдельных участках. Отсутствие разбиения всего диапазона измерения на отдельные участки не позволяет увеличить точность измерения или изменить масштаб измерения на отдельных участках диапазона теми же деталями (элементами) измерения и той же точностью, что применяемые первоначально по всему диапазону измерения ускорения.
Кроме того, в известном способе измерение ведется аналоговым способом, без использования устройств с частотным преобразованием, что также снижает точность преобразования и измерения ускорения и перевод его значений в скорость объекта.
Известно устройство измерения скорости объекта путем интегрирования ускорения, измеренного инерционной массой, из Д.И.Агейкин, М.А.Балашов, С.П.Колосов и др. Руководство по проектированию элементов и систем автоматики. Вып.2 под ред. Б.Н.Петрова, М.: Гос. Изд. Оборонпром, 1959, с.5-26. Недостатком известного устройства является наличие механических преобразователей с подвижными частями, малым ресурсом и точностью.
Известно устройство измерения ускорения инерционной массой, содержащее электродвигатель, диск, постоянный магнит, преобразователь недокомпенсации из Г.Г.Раннев, А.П.Тарасенко. Методы и средства измерений. М.: Издательский центр Академия, 2008, с.221. Недостатки: наличие индукционного преобразователя, необходимость непосредственного доступа к валу, зависимость амплитуды выходного сигнала от измеряемой скорости вращения, что затрудняет измерение малых скоростей.
Известно также устройство, принятое за прототип, измерения скорости с помощью интегрирующего акселерометра, содержащее инерционную массу, преобразователь, усилитель и интегратор из Д.А.Браславский. Приборы и датчики летательных аппаратов. М.: Машиностроение, 1970, с.354-357. Недостатками известного устройства являются небольшая точность измерения ускорения, наличие механических подвижных деталей в виде маятниковой группы с преобразователем угла поворота в электрический потенциал, дополнительного преобразователя напряжения в момент обратной связи.
Техническим результатом способа является повышение точности измерения разбиением на отдельные участки всего интервала изменения ускорения с одновременным увеличением масштаба измерения, получения результата в цифровой форме, причем на всех этапах измерения.
Техническим результатом устройства является измерение ускорения и его преобразование в скорость с помощью пневматической аппаратуры с использованием частотных сигналов, а также повышение помехоустойчивости и снижение влияния различного рода воздействий.
Технический результат способа достигается тем, что предлагается способ измерения скорости тела, при котором ускорение инерционной массы преобразуют, усиливают и интегрируют, в котором весь интервал ускорения разделяют на основной диапазон и поддиапазон, основной диапазон измерения ускорения движения тела, а также поддиапазон разделяют на отдельные участки по ускорению с выбранными приращениями, участок с наибольшим по величине ускорением (последний в диапазоне) считают поддиапазоном, на участках диапазона и поддиапазона преобразуют ускорение в давление, участок диапазона с наименьшими величинами ускорения считают в качестве нулевого (текущего) участка, на котором компенсируют аналоговой обратной связью силовое воздействие в пределах приращения ускорения на каждом участке диапазона, и значениями давления на текущем участке измеряют величины приращения ускорения на других участках диапазона, преобразуют давление в частоту, для равновесия инерционной массы при изменении вектора приращения ускорения вместе с его более/менее граничной величиной в сумматор вводят/выводят для каждого участка диапазона дополнительную силовую компенсацию обратной связью по командам верхнего и нижнего значений порогов давления, формируют код участка, суммируют (интегрируют) импульсы на соответствующих участках диапазона со своим кодом, вычисляют величину скорости на участках диапазона, интервал ускорения инерционной массы на последнем участке диапазона преобразуют в интервалы входных давлений по участкам поддиапазона, для силовой компенсации используют аналоговую обратную связь участков поддиапазона, на которых функционально отделяют общий выходной интервал давления для всех участков поддиапазона от интервала входных давлений участков поддиапазона, соответствующих участкам приращения ускорения поддиапазона, также по командам верхнего и нижнего порогов давлений последовательно включают/выключают участки давлений поддиапазона, также преобразуют давление в частоту, также формируют код участков поддиапазона и также суммируют импульсы на соответствующих участках со своим кодом для вычисления значений скорости по участкам поддиапазона.
Технический результат устройства достигается тем, что пневматический скоростемер, содержащий сумматор с преобразователем интервала ускорения в перемещение, инерционную массу, усилитель мощности и интегратор, в котором интервал ускорения разделен на диапазон и поддиапазон, дополнительно введены участки в диапазоне и поддиапазоне, выходы которых соединены с линией обратной связи, также введены струйный генератор частоты, струйные триггеры пороговых значений минимального и максимального давления на участке, которые через струйные импульсаторы вместе с выходами реверсивного счетчика-указателя кода участка измерения и через свои по участкам элементы И подключены к входам струйных триггеров-переключателей участков, а выходы последних - к клапанам переключения участков, своими проточными входами подключенные к стабилизированному источнику давления, а выходы которых подключены к введенным также по числу участков диапазона ускорения камерам обратной связи в сумматоре, выход усилителя мощности подключен через дискретный клапан переключения диапазон/поддиапазон к струйному генератору, подключенному к счетчику, который вместе с выходами реверсивного счетчика-указателя кода участков соединен с вычислителем, также введены повторители со сдвигом по числу участков поддиапазона ускорения, объединенные входы которых соединены с усилителем мощности и выходы которых подключены по питанию к своим по участкам поддиапазона струйным триггерам переключения своих участков, к входам которых через свои по участкам элементы И подключены струйные импульсаторы вместе с выходами реверсивного счетчика-указателя кода участка измерения, а объединенные выходы струйных триггеров переключения соединены через усилитель давления и дискретный клапан переключения диапазон/поддиапазон к струйному генератору.
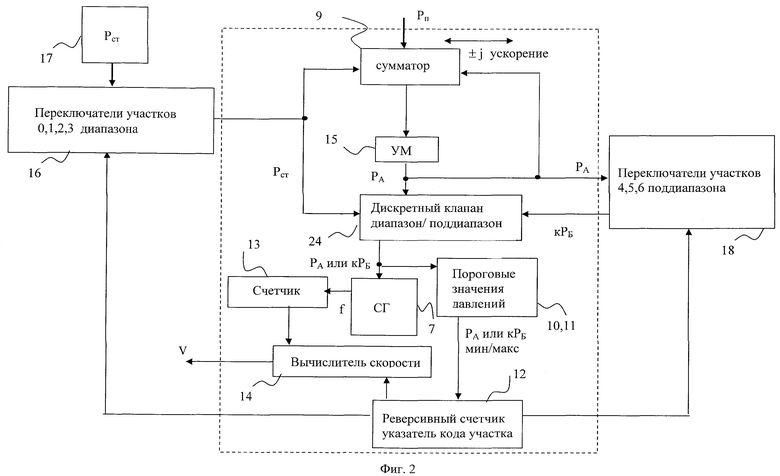
На фиг.1 представлена схема скоростемера (интегрирующего акселерометра), реализующего предложенный способ на пневматических элементах.
На фиг.2 представлена структурная схема устройства - пневматического скоростемера.
Способ измерения скорости тела, при котором ускорение инерционной массы преобразуют, усиливают и интегрируют, в котором весь интервал ускорения, например 0…4 g, разделяют на основной диапазон и поддиапазон, основной диапазон измерения ускорения движения тела 0…3 g разделяют на отдельные участки 0, 1, 2 по ускорению с выбранными приращениями, например 1 g, а также в поддиапазоне 3…4 g участок, например 3, с наибольшим по величине ускорением (последний в диапазоне) считают поддиапазоном, на участках диапазона 0, 1, 2 (поддипазона 4, 5, 6) преобразуют приращение ускорения 0…1 g (0…0,3 g) в давление PA или кРБ=0,1…1,0 атм, участок 0 диапазона с наименьшими величинами ускорения 0…1 g считают в качестве текущего участка, на котором компенсируют аналоговой обратной связью силовое воздействие в пределах приращения 1 g ускорения на каждом участке 0, 1, 2 диапазона, и значениями давления РА=0,1…1,0 атм на текущем участке измеряют величины приращения ускорения 1…2 g, 2…3 g на участках 1, 2 диапазона, преобразуют генератором 7 давление PA в частоту, для равновесия инерционной массы 8 при изменении вектора приращения ускорения вместе с его более/менее граничной величиной, например 1 g, в сумматор 9 вводят/выводят для каждого участка диапазона дополнительную силовую компенсацию обратной связью по командам триггеров верхнего 10 и нижнего 11 значений порогов давлений 1,0 атм и 0,09 атм, формируют 12 код участка, суммируют 13 (интегрируют) импульсы на соответствующих участках диапазона со своим кодом, вычисляют 14 величину скорости на участках диапазона, интервал 3…4 g ускорения инерционной массы на последнем 3 участке диапазона преобразуют в интервалы входных давлений, например по 0,3 атм по участкам 4, 5, 6 поддиапазона, для силовой компенсации используют аналоговую обратную связь на всех участках 4, 5, 6 поддиапазона без дополнительной силовой компенсации для каждого участка поддиапазона, на которых функционально отделяют общий выходной интервал РБ=0,1…0,3 атм давления для всех участков поддиапазона от интервала входных давлений 0,1…0,4 атм, 0,4…0,7 атм, 0,7…1,0 атм участков поддиапазона, соответствующих участкам 4, 5, 6 приращения ускорения 3…3,4 g, 3,4…3,7 g, 3,7…4 g поддиапазона, также по командам триггеров верхнего 10 и нижнего 11 значений порогов давлений 1,0 атм и 0,09 атм последовательно включают/выключают участки 4, 5, 6 давлений поддиапазона, также преобразуют давление кРБ=0,1…1,0 атм в частоту, также формируют 12 код участков 4, 5, 6 поддиапазона и также суммируют 13 импульсы на соответствующих участках со своим кодом для вычисления 14 значений скорости по участкам 4, 5, 6 поддиапазона.
В представленной на фиг.2 структурной схеме устройства можно выделить три части - пунктиром выделена измерительная и вычислительная часть для подсчета скорости движения объекта, справа и слева от нее - пневматические устройства для переключения участков измерения ускорения, расположение которых (участков) соответствует расположению на фиг.1. Измерение сигнала ускорения ±j и преобразование его в скорость происходит с помощью аналоговых сигналов давления PA или кРБ, которые проходят через сумматор 9, усилитель мощности 15 УМ, дискретный клапан 16 переключения первый/второй метод измерения ускорения, струйные триггеры 10, 11 для фиксирования пороговых значений давления (максимальных и минимальных величин давлений) при переключении участков измерения, далее путем преобразования аналоговых значений давления в частоту струйным генератором 7 СГ, число импульсов которого передается через счетчик 13 вычислителю 14, и определяется скорость передвижения объекта, учитывая код участка измерения реверсивным счетчиком 12. Переключатели 16 участков 1…3 диапазона подключают давление источника 17 Рст в компенсационные камеры сумматора 9 и в камеру дискретного клапана 24 для перехода измерения ускорения вторым методом, при котором работают переключатели 18 участков 4, 5, 6 поддиапазона.
Первый метод измерения ускорения (метод «участки на входе») конструктивно ограничен числом камер обратной связи в сумматоре. Для расширения диапазона измерения по участкам необходимо в помощь введение второго метода измерения (метод «участки на выходе»), при котором число камер обратной связи не связано с числом участков и не увеличивается пропорционально числу участков измерения. Т.е. выбирается один участок (любой) диапазона. Этот выбранный участок для работы второго метода называем поддиапазоном, он разделяется в свою очередь на участки, пределы измерения входных значений ускорения также выбираем по участкам, например 0,3 g, но с уменьшенными интервалами входных давлений соответствующих входным участкам по ускорению. Например, для диапазона соответствие 0…1 g / 0,1…1,0 атм по всем участкам 0, 1, 2, участок 3 имеет расширенный интервал ускорения - 3…4 g, который измеряется также давлением 0,1…1,0 атм, для поддиапазона - соответствие 3,0…3,4 g / 0,1…0,4 атм по всем участкам. При этом уменьшенные интервалы выходных значений давления усиливаются до значений давлений, аналогичных давлениям по участкам при измерении ускорения по первому методу - «участки на входе».
В качестве примера на фиг.1 выбран последний 3 участок диапазона для переключения на второй метод измерения по участкам 4, 5, 6 поддиапазона.
Если выбранный участок для поддиапазона находится внутри диапазона (не последний участок диапазона), то необходимы командные сигналы на переключение методов измерения, с первого на второй и обратно для продолжения измерения ускорения по первому методу, после того как число участков поддиапазона будет исчерпано для измерения.
На фиг.2 показана схема, по которой пневмоустройства 8, 9, 15 (инерционная масса 8, сумматор 9, усилитель мощности 15) проводят измерение величин ускорения с помощью аналоговых значений давления, переводят последние струйным генератором 7 в частотные сигналы и далее с помощью пневмоустройств 5, 10, 11 (счетчик 13, реверсивный счетчик 12, вычислитель скорости 14) преобразуют в скорость. Остальные пневмоэлементы схемы служат для переключения участков приращения ускорения при его измерении по первому или второму методу.
Сначала работает левая часть схемы с измерением по методу «участки на входе» (первый метод), например, на диапазон 0…3 g с «текущим» первым участком. «Текущий» участок измеряет ускорение только в пределах, например, 0…1 g. При увеличении ускорения более 1 g действующая инерционная сила на входе «обнуливается», т.е. компенсируется включением давления в своей камере обратной связи, дополнительной, предназначенной только для следующего - второго участка. Измерение продолжается снова на «текущем» участке 0…1 g, так продолжается и на других участках диапазона, для работы которых требуется наличие дополнительных камер обратной связи в сумматоре.
При измерении большого диапазона ускорения с разбиением на малые участки неконструктивно работать с большим числом камер обратной связи, тогда переходят к другому методу измерения. «Текущий» участок при этом теряет свои функции текущего и становится полноценным поддиапазоном измерения ускорения для заданной оставшейся части величин ускорения, которая не измерена в диапазоне. При этом выделенная камера обратной связи (одна), в которой давление (умноженное на эффективную площадь мембраны камеры обратной связи) компенсирует силы, возникающие в поддиапазоне измерения, и поддиапазон также делится на отдельные участки измерения.
Далее включается правая часть схемы фиг.1 и 2, работающая по второму методу - сначала давлением, а далее выходным диапазоном частоты f измеряем приращение ускорения на фоне уже скомпенсированного перемещения мембранного штока от действия 3 g, не привлекая для этого дополнительные камеры обратной связи сумматора. Как бы шток сумматора 2 поддерживается силой от 3 g и измерение далее идет от условного нуля «0» g при увеличении ускорения, например, еще до следующих в сумме 1 g, т.е. от 3 до 4 g. Ранее при измерении в диапазоне ускорения по участкам сумматор 9 перемещался от сопла питания до сопла слива (практически от упора до упора), то при измерении в поддиапазоне ускорения сумматор 9 перемещается на часть полного хода, т.е на такую величину хода, при котором происходит силовая компенсация силы ускорения на данном участке поддиапазона. В общем, при работе левой и правой частей схема, приведенная на фиг.1 и 2, позволяет осуществить измерение ускорения до 4 g с более детальным измерением величин ускорения на последнем участке измерения 3…4 g.
Пневматический струйный генератор 7 СГ (фиг.1) как выходной элемент, преобразующий аналоговый сигнал в частоту, имеет ограниченный линейный диапазон характеристики «давление-частота».
Процедура увеличения точности состоит в том, что этим ограниченным линейным (близко к линейному) диапазоном частоты измеряем не весь диапазон входных значений параметра - ускорения, а его отдельные участки. Т.е. увеличиваем масштаб измерения участков по очереди или рассматриваем отдельные участки входного сигнала под «микроскопным» увеличением с последовательным переключением.
Таким образом, входные участки имеют уменьшенный диапазон, а выходной частотный диапазон измерения ускорения устройства один и тот же для всех входных участков.
Например, если в схеме измерения весь входной диапазон ускорения Δj=10 g, а весь выходной диапазон изменения частоты струйного генератора Δf=1000 Гц, в линейной шкале ошибка на 1 импульс будет составлять 10 g /1000=0,01 g или 1%.
В предложенном способе измерения диапазон (поддиапазон) ускорения делится, например, на Δj=1 g (0,3 g) и выходной диапазон частоты тот же Δf=1000 Гц. При этом ошибка на 1 импульс будет составлять 1/1000=0,1% (в поддиапазоне 0,3/1000=0,03%). Следовательно, в данном примере, применяя предложенный способ измерения для 4 g на 4 участка, величины ускорения измеряются с погрешностью 0,1%, а на последнем - 0,03%.
Этот способ является комбинацией двух методов измерения при разбиении полного диапазона измерения ускорения. Первый метод - метод «участки на входе» с числом камер обратной связи в сумматоре, равным числу участков. Второй метод разбиения поддиапазона - метод «участки на выходе» с одной камерой обратной связи на все участки измерения. Аппаратурным переключением в работу различных по составу участков измерения ускорения достигается процесс измерения, в котором участвует только один участок, но методы измерения разные. При измерении первым методом действует только один и тот же участок для различных интервалов величин ускорения. При измерении вторым методом действуют различные участки на разных интервалах ускорения, но всегда по одному. На всех участках при использовании обоих методов измерение значений ускорения ведется величинами давлений, далее преобразованных в частоту импульсов давления с их дальнейшим подсчетом для определенного отрезка времени и выявления скорости передвижения тела. Комбинация этих методов введена для сокращения состава пневматической аппаратуры скоростемера при измерении более точной величины скорости.
Пневматический скоростемер (фиг.1), содержащий сумматор 9 с преобразователем интервала ускорения в перемещение, инерционную массу 8, усилитель мощности 15 и интегратор, отличающийся тем, что интервал ускорения разделен на диапазон и поддиапазон, дополнительно введены участки 0, 1, 2, 3 в диапазоне и 4, 5, 6 поддиапазоне, выходы которых соединены с линией обратной связи, также введены струйный генератор 7 частоты, струйные триггеры 10, 11 пороговых значений PA минимального 0,09 атм и максимального давления 1,0 атм на участке, которые через струйные импульсаторы 19, 20 вместе с выходами 20, 21, 22 и др. реверсивного счетчика-указателя кода участка измерения 12 и через свои по участкам 1, 2, 3 элементы И 21, 22, 31, 32, 41, 42, 43, 44 подключены к входам струйных триггеров-переключателей 51, 52, 53 участков 1, 2, 3, а выходы последних - к клапанам 61, 62, 63 переключения участков 1, 2, 3, своими проточными входами подключенные к стабилизированному источнику давления Рст, а выходы которых 61, 62, 63 подключены к введенным также по числу участков диапазона ускорения камерам обратной связи в сумматоре 9, выход усилителя мощности 15 подключен через дискретный клапан 24 переключения диапазон/поддиапазон к струйному генератору 7, подключенному к счетчику 13, который вместе с выходами 20, 21, 22 и др. реверсивного счетчика-указателя кода участков 12 соединен с вычислителем 14, также введены повторители 74, 75, 76 со сдвигом по числу участков 4, 5, 6 поддиапазона ускорения, объединенные входы которых соединены с усилителем мощности 15 и выходы которых подключены по питанию к своим (по участкам 4, 5, 6 поддиапазона) струйным триггерам 84, 85, 86 переключения своих участков 4, 5, 6, к входам которых через свои (по участкам) элементы И 140, 141, 150, 151, 160, 161 подключены струйные импульсаторы 19, 20 вместе с выходами 20, 21, 22 и др. триггеров состояния T31 Т32, Т33, например трехразрядного реверсивного счетчика-указателя кода 12 участка измерения, а объединенные выходы струйных триггеров 84, 85, 86 переключения соединены через усилитель 23 давления и дискретный клапан 24 переключения диапазон/поддиапазон к струйному генератору 7, преобразующему аналоговый сигнал PA или кРБ в частоту f.
На фиг.1 также обозначено: обратные клапаны 164, 165, 166 участков 4, 5, 6 измерения поддиапазона; источник Рст стабилизированного пневмопитания; источник Pn пневмопитания.
Сумматор 9 с преобразователем перемещения в давление состоит из многокамерного элемента сравнения с дифференциальными соплами и инерционной массой 8, укрепленной на общем штоке, связывающим мембраны, с числом камер, предназначенных для силовой компенсации инерционной силы ускорения по участкам, равным числу участков измерения. В сумматоре 9 выход камеры, в которой расположено сопло питания, и выход камеры, в которой расположено сопло с выходом в атмосферу, соединены между собой и с усилителем мощности 15 с блоком предварения. Перемещение X инерционной массы 8 относительно корпуса сумматора является мерой действующего ускорения j в данный момент времени и выражается формулой X=k1j для некоторого значения времени t, а давление выхода сумматора 9 связано с перемещением P1=k2X. Отсюда P1=k2k1j. Усилие разделительных элементов мембранного блока 1, возникающее при перемещении инерционной массы 8, принимается малой величиной, входящей в погрешность измерения.
Усилитель мощности 15 с устройством предварения выполнен как, например, трехмембранный элемент сравнения с дифференциальными соплами с пневмоповторителем (например, типа П2П.7) предназначен для создания выходного сигнала, равного по величине давления входному сигналу и увеличенного по расходу. Выходное давление равно PA=Р1+Tn (dP1/dt) или PA=k2k1j+Tn(dj/dt).
Сигнал выхода усилителя мощности, равный PA=kAP1, поступает одновременно к струйному генератору 7, ко всем повторителям со сдвигом 74, 75, 76 и далее как питание струйных триггеров 84, 85, 86 под соответствующим пропорциональным давлением.
Аналоговый сигнал PA преобразуется в выходной частотный сигнал струйным генератором (СГ), построенным на одном или нескольких (например, трех) дискретных струйных элементах. Принимая в ограниченном диапазоне частот линеаризованную зависимость типа QA~k3PA, можно принять зависимость f=k4QA. Частотный выход СГ в виде импульсов давления передается на счетчик 13 и далее вычислителю 14. Реверсивный счетчик-указатель кода участка 12 согласует работу вычислителя для счета по участкам и получает команду передачи кода участка по командам струйных триггеров 10, 11 в ту или другую сторону (увеличение или уменьшение) ускорения j на величину, например, 1 g. Реверсивный счетчик 12 выполнен, например, по патенту №470801.
Для повышения чувствительности по частоте f по предлагаемому способу в скоростемере введены пневматические элементы для каждого участка измерения. Весь диапазон измеряемого ускорения по первому методу делится несколькими участками, крайние величины давления которых будут соответствовать минимальному и максимальному значению по частоте f. Весь диапазон ускорения можно разделить на любые по величине участки и любое количество, т.е. увеличить точность измерения в наиболее интересующих значимых изменениях ускорения j.
Пневматические функциональные устройства 9, 8, 15 входят в контур, в котором от входного ускорения j изменяется давление РА для силовой компенсации j с прибавлением скоростной обратной связи усилителя мощности 15 для большей помехоустойчивости при изменении знака приращения по ускорению. Пневматические устройства 21, 22, 31, 32, 41…44, 51…53, 61…63 только переключают расположение мембранного блока между дифференциальными соплами сумматора 9 при увеличении ускорения j или уменьшении для отсчета ускорения с нового условного нуля.
Источник стабилизированного пневмопитания Рст позволяет более строго выдержать компенсирующую силу, противопоставляемую изменяемой по величине инерционной силе от измеряемого ускорения, и снизить погрешность измерения.
Рассмотрим работу пневматического скоростемера (интегрирующего акселерометра).
Давление питания Pn подано в прибор и при этом на инерционную массу M действует ускорение j. Давлением PA запитан струйный генератор 7, который вырабатывает частотный сигнал f, пропорциональный расходу QA, протекающему через его сопло питания. Частотные импульсы откладываются в счетчик 13 на участке 0…1 g, если весь диапазон измерения разделен, например, по 1 g на участок.
Частота f, вырабатываемая струйным генератором 7, является одним из выходных сигналов устройства, и можно принять в начале характеристики «частота-давление», что частота прямо пропорциональна измеряемому ускорению f=k5j.
Нулевой участок диапазона измерения ускорения j, например, в пределах 0…1 g служит как «текущий» участок, в котором каждый раз начинается измерение ускорения при его увеличении на 1 g при сдвиге условного нуля измерения ускорения. Т.е. фактически интервалом значений давления этого участка сканируются величины ускорений по приращению по всему диапазону (первый метод измерения) от начала до конца после его каждого увеличения или уменьшения. При этом величина ускорения проходит через границы участков максимального и минимального значений между первым и вторым, вторым и третьим и далее и на обратном ходе измерения, при уменьшении абсолютной величины ускорения.
На выходе сумматора 9 формируется давление, пропорциональное ускорению j инерционной массы 8, укрепленной на мембранном блоке. Блок предварения и усилитель мощности 15 формирует сигнал давления, пропорциональный ускорению и его производной, который изменяется, например, в диапазоне 0,1…1 атм.
Далее сигнал давления поступает в камеру отрицательной обратной связи «текущего» (нулевого) участка чувствительного блока для компенсации действия ускорения j на инерционную массу 8 в пределах 0…1 g. Переменное давление PA, зависящее от входного ускорения j, может меняться в любую сторону, при этом изменяется положение общего штока мембранного элемента относительно дифференциальных сопел, т.е. сопла питания и сопла слива или сопла связи с атмосферой. Причем это может происходить на любом участке измерения всего диапазона и поддиапазона ускорения j. При ускорении j=1 g инерционная масса М развивает усилие такой величины, что мембранный блок перемещается на максимальное удаление от сопла питания. Для измерения следующего по величине приращения ускорения в диапазоне мембранный блок сумматора 9 следует переместить в прежнее начальное положение и одновременно изменить точку отсчета и зафиксировать условный ноль «0» для измерения ускорения j в новом положении.
На этом этапе происходят действия, определяемые предложенным способом, в частности первым методом, когда весь диапазон измерения ускорения делят на отдельные участки, преобразуют ускорение в давление, выбирают участок в качестве текущего участка, на котором силовое воздействие от ускорения компенсируют аналоговой обратной связью в сумматоре, и значениями давления текущего участка измеряют величины ускорения на остальных участках, для равновесия инерционной массы при приращении ускорения вводят/выводят для каждого участка дополнительную компенсацию обратной связью в сумматор по командам пороговых датчиков давления, преобразуют давление в частоту, которую передают на счетчик от любого участка, формируют код участка, суммируют импульсы на соответствующих участках и вычисляют величину скорости.
Одновременно давление PA проходит в струйный генератор 7, который вырабатывает импульсы давления для счета в счетчике 13. При переходе на другой участок измерения по команде вычислителя 14, определяемой реверсивным счетчиком-указателем кодов 12, набранное число импульсов сбрасывается вычислителю 14 и на счетчике 13 устанавливается начальное число.
Частота следования импульсов струйного генератора 7 минимальна в начале участка и максимальна в конце, которое вычисляется на струйном счетчике 13, например, в двоичном коде. Это число отражает скорость объекта, передвигающегося с ускорением j≤1 g на отрезке времени 0…t1. При ускорении j≅1 g выходная частота f струйного генератора 7 имеет максимальное значение.
Первый участок диапазона измерения ускорения j находится в пределах 1 g…2 g и ведется он величинами давлений на «текущем» участке. Все участки диапазона ускорения переходят для измерения давлениями «текущего» участка, а в разные соответствующие своим участкам компенсационные камеры чувствительного блока 1 подается только давление после включения клапанов 9 для равновесия мембранного блока между двумя дифференциальными соплами питания и слива блока сумматора 1. При разных значениях ускорения в интервалах участка и его инерционной силы, действующей на инерционную M массу 8, при измерении первым методом требуется сложение компенсационных сил в разных камерах отрицательной обратной связи сумматора 9.
Измерение на первом участке диапазона снова начинается с минимальной частоты f струйного генератора 7, так как в мембранном блоке заслонка элемента «сопло-заслонка», камера которого связана с атмосферой, находится на максимальном удалении от сопла слива и на минимальном расстоянии от сопла питания находится заслонка другой пары «сопло-заслонка». В это время через струйный генератор 7 проходит минимально возможный расход QA, одинаковый для всех участков измерения в диапазоне.
При увеличении ускорения j>1 g увеличивается давление PA, одновременно вырабатываются СГ 7 пневмоимпульсы, которые передаются на счетчик 13. Два струйных пороговых триггера (реле) 10 и 11 определяют коридор (0,09…1,0 атм) изменения давления PA (0,1…1,0 атм). При давлении PA>1,0 атм реле 10 переключается в новое устойчивое верхнее положение (фиг.1). Сформированный сигнал от реле 10 после импульсатора 19 поступает в следующих направлениях: 1) на изменение кода в «+» реверсивного счетчика-указателя кода 12 при увеличении ускорения при зачете импульсов счетчика 13 с другим весом для вычислителя 14, т.е. знак 20=0 меняется на 20=1; 2) переключает струю питания струйного триггера 51 в верхнее положение после срабатывания И элемента 22; 3) далее по этой команде открывается дискретный клапан 61 и пропускает давление Рст=1 атм=const от стабилизированного источника, которое поступает в камеру обратной связи сумматора 9 первого участка измерения и обозначает сдвиг условного нуля «0» измерения ускорения j.
Если ранее при j<1 g необходимо было обратной связью компенсировать силу, равную до 1 Mg, то на первом участке измерения ускорения сила компенсации должна быть до 2 Mg. После срабатывания триггера 51 на сумматоре 9 уже суммируется к имеющейся ранее силе дополнительная сила по противодействию j на первом участке. Поскольку в дополнительную камеру обратной связи подано максимальное давление, соответствующее концу первого участка измерения, то частота f изменила свое значение с max на min и соответствует j≅1 g+0,0. Так как инерционная масса M вместе с мембранным блоком сумматора 9 вернулась в исходное состояние (положение) по перемещению, то и вслед за этим давление РА имеет минимальное значение.
Одновременно реверсивный счетчик-указатель кода участков 12 для участка 1, на котором j=1…2 g, передает код 20=1 вычислителю 14. Так закончилась перестройка измерения ускорения с нулевого участка на первый участок.
Давление PA минимально и равно 0,1 атм, так как осуществлена перестановка мембранного блока сумматора 9 в первоначальное положение для начала работы опять текущего участка уже в пределах измерения ускорения j=1…2 g, т.е. произошел сдвиг условного нуля «0» для измерения ускорения на первом участке. Импульсы поступают от счетчика 13 и передаются вычислителю 14 с другим весом на первом участке. Также учитывается вес на втором, третьем и т.д. участках измерения приращения ускорения j.
Частота следования импульсов струйного генератора 7 минимальна в начале участка и максимальна в конце. Число импульсов определяется счетчиком 5 и отражает скорость объекта, передвигающегося с ускорением 1 g ≤ j ≤ 2 g на отрезке времени t1…t2.
На этом этапе проходят действия, определяемые предложенным способом, когда в разделенном на отдельные участки диапазоне измерения ускорения компенсируют силовое воздействие от ускорения на нулевом участке аналоговой обратной связью по давлению нулевого участка и вводят дополнительную силовую (величина давления, умноженная на эффективную площадь мембраны) компенсацию от источника стабилизированного давления по достижении назначенной величины приращения ускорения, преобразовывают давление, полученное на первом участке, в частоту, интегрируют количество пневмоимпульсов за определенный промежуток времени и вычисляют скорость на первом участке.
Когда давление будет PA>1,0 атм, то это означает, что измерение ускорения j на нулевом участке закончилось и измерение должно автоматически продолжиться на первом участке 1…2 g. Однако при неожиданном уменьшении ускорения менее 1 g необходимо вернуться на нулевой (текущий) участок измерения 0…1 g.
Переменное давление РА, зависящее от входного ускорения j, может меняться в любую сторону, при этом изменяется положение общего штока мембранного элемента сумматора 9 с инерционной 8 массой M относительно дифференциальных сопел, сопла питания и сопла слива (сопла связи с атмосферой). Причем это может происходить на любом участке измерения всего диапазона ускорения j.
Рассмотрим процедуру возврата измерения с первого участка на нулевой (текущий) участок измерения ускорения.
Ускорение j>1 g уменьшается, и давление становится PA<0,09 атм, которое при сравнении переключает струю питания струйного реле 11. Под действием импульсатора 20 происходит несколько автоматических переключений: 1) подан сигнал со знаком минус «-» в счетчик-указатель кода 12 для счета импульсов, поступающих от счетчика 13 в вычислитель 14 с прежним весом импульсов, соответствующих участку измерения 0…1 g; 2) возвращается струя питания в положение «1» струйного триггера 51 после получения сигнала через струйный 21 элемент И от двух сигналов-импульса импульсатора 20 и сигнала  от реверсивного счетчика 12; 3) клапан 61 закрывает доступ давления Рст от стабилизированного источника питания к камере обратной связи первого участка. После этого измерение ускорения полностью переходит на нулевой (текущий) участок.
от реверсивного счетчика 12; 3) клапан 61 закрывает доступ давления Рст от стабилизированного источника питания к камере обратной связи первого участка. После этого измерение ускорения полностью переходит на нулевой (текущий) участок.
При продолжении падения ускорения по величине уменьшается давление PA, которое компенсирует это изменение силового воздействия ускорения на инерционную массу в камере обратной связи текущего участка мембранного блока сумматора 9 и фиксацией числа импульсов на счетчике 13. Измерение продолжается до величины ускорения, равной j=0. При ускорении j<0 давление PA минимально, так как мембранный блок сумматора 9 вместе с инерционной массой M находится на упоре у сопла питания сумматора 9.
При увеличении ускорения j>0 опять начинает возрастать давление PA и измерение продолжается текущим участком в пределах 0…1 g.
Далее, если увеличивается ускорение j и PA>1,0, струйный триггер 10 переключается и струя питания занимает верхнее положение (переключается «0» на «1» на фиг.1). Это момент вступления в работу первого измерительного участка.
Отработав на первом участке, измерение начинается на втором. Струйный триггер 51 не переключается, т.е. струя питания не меняет своего положения, клапан 61 остается открытым, и давление Рст подается в камеру обратной связи 1 участка.
Второй участок измерения ускорения j в пределах 2 g…3 g. В начале второго участка при j≥2 g частота f струйного генератора 7 и давление PA также имеют минимальное значение. Перемещение X мембранного блока в исходное (первоначальное) положение происходит благодаря срабатыванию триггера 52. Положение струи в триггере 51 продолжает оставаться в переключенном верхнем положении (фиг.1) для компенсации воздействия ускорения j на участке до 2 g.
Величина ускорения достигает максимального значения на втором участке, что соответствует максимальному давлению PA>1,0, которое на триггере 10 приводит к переключению струи питания и переходу на участок 2. После выработки импульса элементом 19 происходят переключения в следующих пневмоэлементах: 1) включается реверсивный счетчик-указатель кода 12 участков для участка 2, на котором вырабатывается сигнал 21=1 для переключения на второй участок и передается вычислителю 14 и струйному И элементу 32; 2) подается импульс на струйный И элемент 32; 3) струйный триггер 52 переключается - положение «0» меняется на «1»; 4) открывается клапан 62, и давление Рст проходит в камеру обратной связи участка 2 мембранного блока сумматора 9 для компенсации возросшего ускорения j. Если ранее при j>1 g необходимо было обратной связью компенсировать силу, равную до 2 Mg, то в конце второго участка измерения ускорения сила компенсации должна быть до 3 Mg. Сигнал реверсивного счетчика 12 вычислителю 14 об изменении кода участка с 1 на 2 изменяет условный нуль отсчета ускорения, т.е осуществляется переход измерения к следующему приращению 1 g ускорения.
Между крайними значениями ускорения 2…3 g на участке 2 обратная силовая связь вырабатывается работой текущего участка. После срабатывания триггера 52 и за ним клапана 62 на мембранном блоке сумматора 9 уже суммируется к имеющейся ранее силе дополнительная сила по противодействию j на втором участке. Поскольку в дополнительную камеру обратной связи сумматора 9 подано давление от источника стабилизированного питания Рст=1 атм, то частота f изменила свое значение с max на min и соответствует j≅2 g+0,0. Так как инерционная масса M вместе с мембранным блоком сумматора 9 вернулась в исходное состояние (положение) по перемещению, то и вслед за этим давление PA имеет минимальное значение в начале работы на втором участке. При увеличении ускорения j>2g увеличивается давления PA вследствие перемещения X мембранного блока с инерционной массой 8 к атмосферному соплу слива сумматора 9, что приводит к увеличению частоты f струйного генератора 7. При ускорении j=3 g выходная частота f струйного генератора 7 имеет максимальное значение.
Число импульсов счетчика 13 с кодом второго участка реверсивного счетчика 12, переданное вычислителю 14, показывает скорость движения объекта на втором участке при 2 g < j < 3 g в течение некоторого времени t2…t3.
Третий участок измерения диапазона ускорения j в пределах 3 g…4 g передается для измерения вторым методом другой части схемы, и его необходимо разделить на свои участки, включив на каждом свой набор пневмоаппаратуры.
В начале третьего участка при j≥3 g частота f струйного генератора 7 и давление PA также имеют минимальное значение, обусловленное перемещением инерционной массы 8 в сумматоре 9 в исходное положение.
Положение струи в триггерах 51, 52, 53 продолжает оставаться в переключенном верхнем положении (фиг.1) для компенсации воздействия ускорения j на участке 3.
Когда ускорение на втором участке достигает своей верхней границы, переключается триггер 10. После выработки импульса элементом 19 происходят переключения в следующих пневмоэлементах: 1) включается реверсивный счетчик- указатель кода 12 участков для участка 3, на котором вырабатывается сигналы 20=1, 21=1, и передаются вычислителю 14 и струйному И элементу 44; 2) подается импульс на струйный И элемент 43 и вместе с импульсом струйного И элемента 44 (20=1,+21=1) вырабатывается сигнал для переключения струйного триггера 53 - положение «0» меняется на «1»; 3) открывается клапан 63, и давление Рст проходит в камеру обратной связи участка 3 мембранного блока сумматора 9 для компенсации возросшего ускорения j.
Если ранее при j>2 g необходимо было обратной связью компенсировать силу, равную до 3 Mg, то в конце третьего участка измерения ускорения сила компенсации должна быть до 4 Mg. Однако при втором методе измерения ускорения на третьем участке будет использовано полное перемещение X мембранного блока для компенсации приращения по частям 0,3 g. Весь ход по перемещению X предназначен по частям для компенсации давлением ускорения до 4 g. Требуемая сила компенсации на приращение 1 g разделяется в данном примере (фиг.1) на три участка измерения с приращением примерно 0,3 g.
На участке 3 при втором методе измерения ускорения происходит разделение функций - выработка силовой обратной связи и измерение приращений ускорения 0,3 g. На участках 1 и 2 при полном перемещении X текущим участком вырабатывалось давление PA=0,1…1,0 атм. На участке 3 текущий участок продолжает функционировать, обеспечивая обратную связь по давлению в сумматоре 9, но на уменьшенных отрезках перемещения X. Участки 4, 5, 6 измерения ускорения, на которых вырабатывается давление кРБ=0,1…1,0 атм на частичном перемещении X, работают только на генератор 7, а на камеру обратной связи сумматора 9 - давление PA.
После подачи давления Рст в камеру обратной связи сумматора 9 давление PA и частота СГ 7 получают минимальные значения вследствие перемещения мембранного блока сумматора 9 в исходное положение. На третьем участке частотой струйного генератора 7 измеряется возрастающее ускорение и пропорциональное ему давление. При этом на уменьшенных интервалах давления текущего (нулевого) участка, соответствующих уменьшенным перемещениям X инерционной массы сумматора 9, вырабатывается давление в значениях 0,3 атм с помощью повторителей со сдвигом 74, 75, 76.
При уменьшении ускорения j (возможно до чуть менее 3 g) на четвертом участке поддиапазона, расположенного на третьем участке диапазона, инерционная 8 масса M перемещается к соплу питания сумматора 9 и уменьшается давление PA после усилителя мощности 15 до «min» значения, например PA<0,09 атм. При этом обозначен переход на участок 2. Реле 11 посылает сигнал через импульсатор 20 в нескольких направлениях: 1) в реверсивный счетчик-указатель кода 12 для получения знака  и 21=1 в струйный И элемент 42, выход которого вместе с импульсом 20 через струйный И элемент 41 переключает триггер 53 на закрытие клапана 63 и отключение Рст от камеры обратной связи сумматора 9 и восстановления отсчета условного «0» для ускорения j второго участка. Далее измерение ускорения происходит на участке 2. Закрытие клапана 63 переключает дискретные клапаны 24 и выводит из работы пневмоповторитель 74 и второй метод измерения ускорения на участках в поддиапазоне.
и 21=1 в струйный И элемент 42, выход которого вместе с импульсом 20 через струйный И элемент 41 переключает триггер 53 на закрытие клапана 63 и отключение Рст от камеры обратной связи сумматора 9 и восстановления отсчета условного «0» для ускорения j второго участка. Далее измерение ускорения происходит на участке 2. Закрытие клапана 63 переключает дискретные клапаны 24 и выводит из работы пневмоповторитель 74 и второй метод измерения ускорения на участках в поддиапазоне.
При уменьшении величины ускорения и далее повторяется процесс переключения триггеров и реле участков второго и первого для процедуры измерения на текущем участке, подобно переходу от первого участка к нулевому, описанному ранее.
Если вновь увеличивается ускорение j более одного g, переключение пневмоэлементов происходит по схеме, описанной в начале работы предложенного устройства.
При переключении на четвертый участок и включении клапана 63 подается команда давлением Рст на переключение дискретного клапана 24 в положение, пропускающее давление kРБ только от усилителя давления 23 на струйный генератор 7. Работа струйного генератора 7 начинается с минимальной частоты, соответствующей минимальному давлению, поступающему от усилителя давления 23 с разрешения струйного триггера 84 и пневмоповторителя 74 четвертого участка поддиапазона измерения ускорения j.
Пневматические повторители со сдвигом 74, 75, 76, например, на базе типа П2П.2 предназначены для коммутации непрерывных сигналов, поступающих после усилителя мощности 15 и настроенных каждый на свой участок приращения ускорения. Пневматический повторитель со сдвигом создает выходной сигнал, отличающийся по давлению от входного аналогового сигнала на постоянную величину - величину сдвига.
Четвертый участок имеет сдвиг Р4=0, пятый P5=0,3, шестой Р6=0,6 атм относительно условного нуля РА=0,1 атм. Кроме того, повторитель со сдвигом имеет упор ограничения максимального значения давления на участке, например на четвертом - 0,4 атм, на пятом - 0,7 атм, на шестом - 1,0 атм.
Дискретные клапаны 84, 85, 86 участков, выполненные, например, в виде струйных триггеров, предназначены для коммутации непрерывных сигналов давления, отделенных от PA пневмоповторителями со сдвигом 74, 75, 76, пропорциональных измеряемому ускорению j и поступающих после усилителя мощности 15 на аналоговый усилитель давления 23. Выходное давление пневмоповторителя имеет токовую связь со струйным триггером (клапаном), поскольку его аналоговый сигнал поступает в сопло питания триггера и далее в общую линию РБ давления выхода, в которой обратные клапаны участков 164, 165, 166 и переключение струйных триггеров не позволяют смешивать выходные аналоговые сигналы по участкам 4, 5, 6 поддиапазона. В процедуре измерения ускорения функционирует только один участок, остальные еще не включены в измерение или выведены из него.
Усилитель давления 23 аналоговых сигналов, например, типа П2ЭС.1 представляет собой трехмембранный элемент сравнения с дифференциальными соплами. Выходы камер блока, в которых расположены сопла, соединены между собой и с входом струйного преобразователя аналогового сигнала в частоту - струйного генератора 7. Двухвходовой усилитель, охваченный отрицательной обратной связью через пневмосопротивление с проводимостью kос и соединенный с атмосферой переменным сопротивлением с проводимостью k1, позволяет получить умножение входной величины приращения давления РБ на постоянный коэффициент k.
Работает пневматический скоростемер в поддиапазоне следующим образом.
На четвертом участке измеряется ускорение в пределах 3,0…3,4 g, и давление PA после усилителя мощности изменяется в пределах 0,1…0,4 атм, на пятом участке 3,4…3,7g давление PA изменяется в пределах 0,4…0,7 атм, и на шестом участке 3,7…4 g соответственно 0,7…1,0 атм.
При переходе измерения ускорения вторым методом на поддиапазоне участки по приращениям ускорения могут быть различные по величине, но соответствовать интервалам выходного давления после пневмоповторителя, например 0,3 атм.
Весь поддиапазон изменения ускорения можно также разделить на любые по величине участки и любое количество, т.е. увеличить точность измерения в наиболее значимых изменениях j. При этом необходимо увеличивать коэффициент k для получения соизмеримых величин kPБ давления с величинами PA на границах участков и их контроля.
Давление питания Pn подано в прибор и действует ускорение j при движении объекта на инерционную 8 массу M. Подано давление на пневмоповторители со сдвигом 74, 75, 76 с начальным уровнем, например, до 0,1 атм. Давление РА в общей линии, связанной с величиной ускорения j, поступает в пневмоповторители, которые ожидают своей очереди на включение в работу. Все струйные триггеры 84, 85, 86 по участкам включены на слив или закрытие от общего выхода с давлением РБ, имеют на выходе «1», как показано на фиг.1.
На четвертом участке поддиапазона измерения ускорения j, например, в пределах 3,0…3,4 g формируется давление PA, например 0,1…0,4 атм, пропорциональное ускорению j, полученное инерционной массой 8, укрепленной на мембранном блоке сумматора 9. Полный интервал давления PA входной линии изменяется в пределах 0,1…1,0 атм и соответствует полному поддиапазону ускорения 3…4 g и интервалу давления 0,05…0,2 атм в выходной линии давления РБ на любом участке поддиапазона приращения ускорения j. Каждый пневмоповторитель 74, 75, 76 со сдвигом пропускает через себя диапазон давления, равный 0,3 атм. По участкам эти диапазоны следующие - для четвертого 0,1≤PA≤0,4 атм; для пятого 0,4≤PA≤0,7 атм; для шестого 0,7≤PA≤1,0 атм.
Входное давление РА поступает в камеру пневмоповторителя со сдвигом 74, и далее аналоговый сигнал давления, не связанный током с входным давлением PA, поступает в сопло питания струйного триггера 84. Далее под воздействием управляющего сигнала 21 реверсивного счетчика 12 сигнал проходит через обратный клапан 164 в линию выхода с давлением РБ, передается в усилитель давления участков 23, проходит в виде кРБ через дискретный клапан 24 и преобразуется в частотные импульсы давления в струйном генераторе 7, которые откладываются в струйном счетчике 13 для передачи вычислителю 14 и определения скорости движения объекта за определенный период времени по числу накопленных пневмоимпульсов с кодом «110» трехразрядного реверсивного счетчика 12. При давлении кРБ (например, 0,1 атм) фиксируется начальный уровень частоты, соответствующий ускорению j=3 g.
Ускорение j увеличивается до 3,4 g. При достижении значения давления во входной линии PA~0,4…0,42 атм в выходной линии РБ давление на четвертом участке будет 0,21>0,2 атм, увеличенное в усилителе давления 23, становится более верхнего порога (1,0 атм) струйного реле 10, в котором переключается струя питания. Сигнал давления поступает в импульсатор 19 для передачи по трем направлениям: 1) в линию «+» в реверсивный счетчик 12 - указатель кода, фиксируя ввод кода «001» пятого участка в измерение ускорения сигналом 22=1; 2) в триггер 85 для включения связи с линией общего выходного давления РБ и линии давления РА через пневмоповторитель со сдвигом 75 пятого участка измерения ускорения j; 3) одновременно вместе с сигналом 22=1 выключает из работы четвертый участок измерения ускорения j по сигналу от струйного И элемента 150.
После этого давление PA не поступает на четвертый участок, поступает только на пятый участок и далее опять включаются в работу пневматические пороговые элементы, общие для всех участков измерения ускорения j, которые следят за контрольными значениями ускорения и соответствующего давления на границах участков.
Число импульсов струйного генератора 7 на пятом участке накапливается счетчиком 13 и передается вычислителю 14 на струйных триггерах за период времени, которое отражает скорость объекта, передвигающегося с ускорением 3,4 g ≤ j ≤ 3,7 g на некотором отрезке времени. При переходе на пятый участок измерения ускорения набранное число импульсов давления на четвертом участке обнуляется по команде вычислителя 14 и начинается набор числа импульсов для пятого участка. Обнуление возможно также периодически или после подсчета величины скорости на четвертом участке.
На пятом участке поддиапазона измерения ускорения j, например, в пределах 3,4 g…3,7 g усилителем мощности 15 формируется давление РА, например, 0,4…0,7 атм, пропорциональное ускорению j. В общей линии давления РБ этому соответствует вырабатываемое пневмоповторителем 75 через струйный триггер 85 давление 0,05…0,2 атм.
Измерение на этом участке снова начинается с минимальной частоты f струйного генератора 7, так как пневмоповторитель 75 начинает свою работу с минимального давления 0,1 атм, благодаря свойству сдвига передает в линию питания триггера 85 сигнал 0,1 атм и через струйный генератор 7 проходит минимальный расход Q. Увеличивается давление РБ, и усилитель давления 23 подает в струйный генератор 7 расход с увеличенным давлением (~5 раз) на увеличение частоты.
При увеличении ускорения j>3,4 g увеличивается давление кРБ, которое проходит в камеру обратной связи мембранного сумматора 9 для компенсации возросшего ускорения j, т.е. контур обратной связи продолжает работать на пятом участке ускорения, также и на последующих участках, независимо от включенного/выключенного участка измерения. Обратные клапаны 164, 165, 166 обеспечивают независимость работы по участкам.
При неожиданном изменении направления приращения ускорения j с «+» на «-» на пятом участке в общей выходной линии давление уменьшается до величины, например, PA<0,9 атм. Реле 11 переключается для перехода на четвертый участок, посылая сигнал через импульсатор 20 по направлениям: 1) в реверсивный счетчик 12 для изменения кода «001» пятого участка на код «110» четвертого участка и выработки сигнала 20=1; 21=1; 22=0; 2) на переключение триггера 85 струйным И элементом 151, в котором он складывается с сигналом 21=1, для отключения пневмоповторителя со сдвигом 75 от линии давления РБ; 3) одновременно через струйный И элемент 151 на триггер 84 для связи общей линии давления РБ с пневмоповторителем со сдвигом 74 и включения в работу четвертого участка измерения ускорения j.
При изменении (на +) приращения величины ускорения j на четвертом участке вновь давление в линии PA увеличивается. Входное давление PA поступает в камеру пневмоповторителя со сдвигом 74, и аналоговый сигнал давления поступает в сопло питания струйного триггера 84. Если ускорение увеличивается >4 g, включается пятый участок поддиапазона, срабатывает реле 10 и импульс от элемента 19 поступает в реверсивный счетчик 12, вырабатывающий код «001». Далее под воздействием управляющего сигнала 22=1 реверсивного счетчика 12 сигнал проходит от струйного И элемента 150 через обратный клапан 165 в линию выхода с давлением РБ, одновременно выключая триггер 84 из работы. Если ускорение и далее растет на пятом участке, давление в линии РА увеличивается, например, >0,7 атм, в линии РБ увеличивается до величины >0,2 атм. Преодолевая верхний порог сигнал переключает реле 10, от импульсатора 19 реверсивный счетчик-указатель кода 12 вырабатывает код «101» шестого участка, далее элементом И 160 включается триггер 86, выключается триггер 85, и включается в работу шестой участок измерения приращения ускорения j.
Число импульсов в счетчике 13, поступающих от струйного генератора 7, фиксируется вычислителем 14, который отражает скорость объекта, передвигающегося с ускорением 5 g ≤ j ≤ 6 g на отрезке времени.
При уменьшении величины ускорения менее 5g уменьшается давление в линии РБ<0,05 атм и измерение переходит с шестого участка на пятый. После усилителя давления 23 вырабатываются следующие сигналы - от импульсатора 20 по линии «-« в реверсивный счетчик 12, который переходит на код «001» пятого участка и вырабатывает сигнал  . Вместе эти сигналы через элемент И 161 выключают триггер 86 и включают триггер 85 для работы на пятом участке.
. Вместе эти сигналы через элемент И 161 выключают триггер 86 и включают триггер 85 для работы на пятом участке.
Если измерение производилось на шестом участке и ускорение продолжает увеличиваться, при котором давление в линии становится PA>1,0 атм, то давление в камере ОС сумматора 9 уже не компенсируется. При этом мембранный блок устанавливается на упор вблизи сопла слива, максимальное давление и частота струйного генератора 9 не меняется, и процедура измерения ускорения не осуществляется до тех пор, пока ускорение не снизится <4 g и инерционная масса 8 изменит свое положение в сумматоре 9.
Однако при измерении ускорения внутри четвертого участка и определении уменьшения ускорения j<3,7 g происходит переключение пневмоэлементов для включения в работу пятого участка измерения, подобно описанному ранее переходу с пятого участка на четвертый.
Сумма числа импульсов струйного генератора 7 по измерительным участкам со своими кодами, подсчитанная вычислителем 14, выражает скорость объекта в конце шестого участка в течение некоторого периода времени.
В данном примере устройства число участков измерения поддиапазона ускорения j равно трем. Если число участков поддиапазона >3, то необходимо в схему, приведенную на фиг.1, добавить функциональные элементы, аналогичные участку 4.
Таким образом, предложенный способ увеличивает точность измерения ускорения путем деления всего диапазона на отдельные измерительные участки, еще более уменьшая погрешность измерения при измерении в поддиапазоне путем деления его также на отдельные участки и преобразование ускорения в диапазоне и поддиапазоне в скорость частотным способом с помощью пневматических элементов.
Предложенные признаки - деление на участки всего измерительного диапазона ускорения, введение дополнительного источника стабилизированного питания с значениями давления текущего участка, выбранного по ограниченному размеру ускорения, измерения ускорения остальных участков, использование частотной характеристики струйного генератора, реализация на пневмоэлементах - все это позволяет получить устройство для измерения скорости в цифровой форме с меньшей погрешностью измерения ускорения. Кроме того, предложенный струйный набор пневмоаппаратуры позволяет повысить надежность работы пневмоскоростемера в условиях активных помех различной физической природы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПНЕВМАТИЧЕСКОГО ПРЕОБРАЗОВАНИЯ УСКОРЕНИЯ ДВИЖЕНИЯ ТЕЛА В СКОРОСТЬ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2421734C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ТЕЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2420745C1 |
| Функциональный генератор напряжения | 1976 |
|
SU734746A2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2003 |
|
RU2244311C1 |
| Способ выбора поддиапазона измерений в универсальных экстремальных мостах переменного тока | 1987 |
|
SU1429044A1 |
| Цифровой вычислитель синуса и косинуса | 1977 |
|
SU682905A1 |
| Цифровой синтезатор изменяющейся частоты | 1988 |
|
SU1525861A1 |
| Устройство для программного управления | 1986 |
|
SU1376065A1 |
| Устройство для измерения времени установления цифроаналогового преобразователя | 1986 |
|
SU1446693A1 |
| Фотоэлектрический анализатор количества и размеров частиц | 1987 |
|
SU1518727A1 |
Заявленная группа изобретений относится к способам и устройствам, использующимся при навигации летательных аппаратов, при измерении ускорения и скорости. Заявленное устройство содержит сумматор с преобразователем интервала ускорения в перемещение; инерционную массу; усилитель мощности; вычислитель; струйный генератор частоты; струйные триггеры пороговых значений минимального и максимального давления на участке; струйные импульсаторы; реверсивный счетчик-указатель кода участка измерения; элементы И; струйные триггеры-переключатели участков; клапаны переключения участков; стабилизированный источник давления; камеры обратной связи в сумматоре; дискретный клапан переключения диапазон/поддиапазон; счетчик; повторители со сдвигом по числу участков поддиапазона ускорения; усилитель давления. Особенностью заявленного способа является то, что весь интервал ускорения разделяют на диапазон и поддиапазон, которые разделяют на отдельные участки по ускорению. На участках диапазона и поддиапазона преобразуют ускорение в давление. Преобразуют давление в частоту, формируют код участков диапазона и поддиапазона, суммируют импульсы на соответствующих участках со своим кодом для вычисления величины и значений скорости по участкам диапазона и поддиапазона. Технический результат - повышение точности измерения, а также повышение помехоустойчивости и снижение влияния различного рода воздействий. 2 н.п. ф-лы, 2 ил.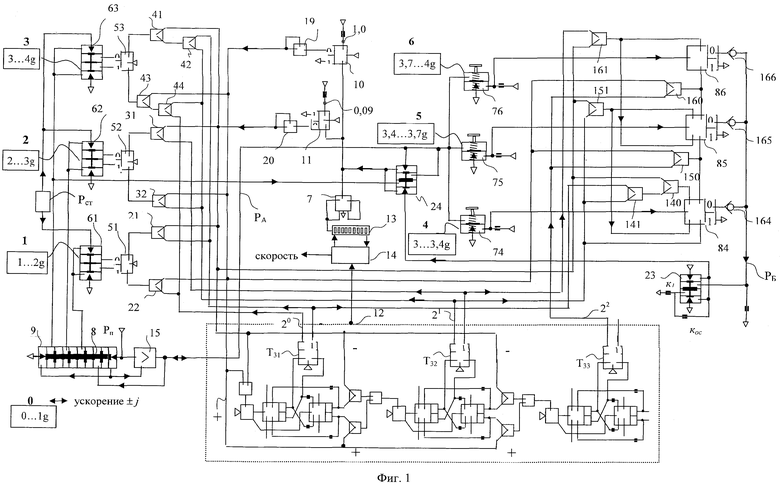
1. Способ измерения скорости тела, при котором ускорение инерционной массы преобразуют, усиливают и интегрируют, отличающийся тем, что весь интервал ускорения разделяют на основной диапазон и поддиапазон, основной диапазон измерения ускорения движения тела, а также поддиапазон разделяют на отдельные участки по ускорению с выбранными приращениями, участок с наибольшим по величине ускорениием (последний в диапазоне) считают поддиапазоном, на участках диапазона и поддиапазона преобразуют ускорение в давление, участок диапазона с наименьшими величинами ускорения считают в качестве нулевого (текущего) участка, на котором компенсируют аналоговой обратной связью силовое воздействие в пределах приращения ускорения на каждом участке диапазона, и значениями давления на текущем участке измеряют величины приращения ускорения на других участках диапазона, преобразуют давление в частоту, для равновесия инерционной массы при изменении вектора приращения ускорения вместе с его более/менее граничной величиной в сумматор вводят/выводят для каждого участка диапазона дополнительную силовую компенсацию обратной связью по командам верхнего и нижнего значений порогов давления, формируют код участка, суммируют (интегрируют) импульсы на соответствующих участках диапазона со своим кодом, вычисляют величину скорости на участках диапазона, интервал ускорения инерционной массы на последнем участке диапазона преобразуют в интервалы входных давлений по участкам поддиапазона, для силовой компенсации используют аналоговую обратную связь участков поддиапазона, на которых функционально отделяют общий выходной интервал давления для всех участков поддиапазона от интервала входных давлений участков поддиапазона, соответствующих участкам приращения ускорения поддиапазона, также по командам верхнего и нижнего порогов давлений последовательно включают/выключают участки давлений поддиапазона, также преобразуют давление в частоту, также формируют код участков поддиапазона и также суммируют импульсы на соответствующих участках со своим кодом для вычисления значений скорости по участкам поддиапазона.
2. Пневматический скоростемер, содержащий сумматор с преобразователем интервала ускорения в перемещение, инерционную массу, усилитель мощности и вычислитель, выполненный с возможностью определения скорости объекта в течение заданного периода времени, отличающийся тем, что интервал ускорения разделен на диапазон и поддиапазон, дополнительно введены участки в диапазоне и поддиапазоне, выходы которых соединены с линией обратной связи, также введены струйный генератор частоты, струйные триггеры пороговых значений минимального и максимального давлений на участке, которые через струйные импульсаторы вместе с выходами реверсивного счетчика-указателя кода участка измерения и через свои по участкам элементы И подключены к входам струйных триггеров-переключателей участков, а выходы последних - к клапанам переключения участков, своими проточными входами подключенные к стабилизированному источнику давления, а выходы которых подключены к введенным также по числу участков диапазона ускорения камерам обратной связи в сумматоре, выход усилителя мощности подключен через дискретный клапан переключения диапазон/поддиапазон к струйному генератору, подключенному к счетчику, который вместе с выходами реверсивного счетчика - указателя кода участков соединен с вычислителем, также введены повторители со сдвигом по числу участков поддиапазона ускорения, объединенные входы которых соединены с усилителем мощности и выходы которых подключены по питанию к своим по участкам поддиапазона струйным триггерам переключения своих участков, к входам которых через свои по участкам элементы И подключены струйные импульсаторы вместе с выходами реверсивного счетчика-указателя кода участка измерения, а объединенные выходы струйных триггеров переключения соединены через усилитель давления и дискретный клапан переключения диапазон/поддиапазон к струйному генератору.
| Устройство для измерения скорости движения объекта | 1990 |
|
SU1780015A1 |
| Устройство для измерения скорости | 1989 |
|
SU1695235A1 |
| JP 62112069 A, 23.05.1987 | |||
| JP 61132872 A, 20.06.1986 | |||
| Устройство для программного управления | 1985 |
|
SU1267362A2 |

