I
.Изобретение предназначено для работы в тех отраслях проььлцленности, где п{5именя-. liOTCH устройства управления потоком жидкнх и газовых сред.
Известны датЧ| ХИ положения затвора клапана, содержащего герметичный корпус, внутри которого установлеи постояннь1й магнит, (воздействующие своиц полем на мапшто . упраляемый контакт.
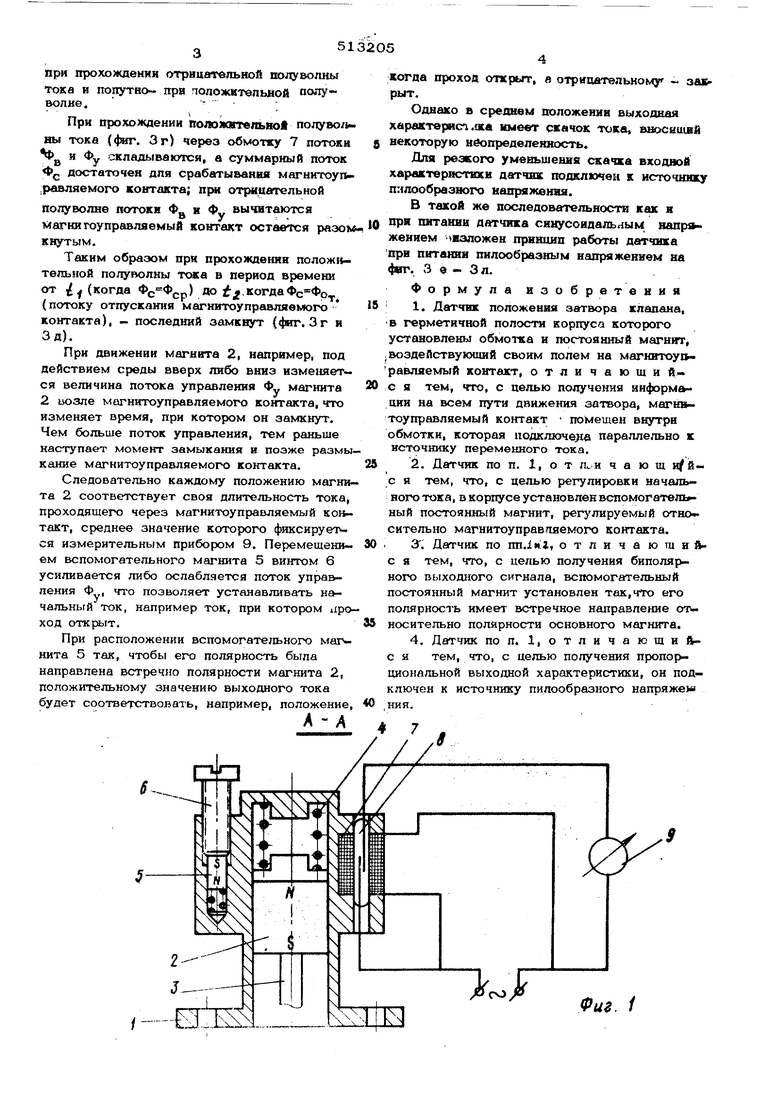
, Предлагаемый датчнк отличается от из- вестных тем, что магнитоупуавляемый хон- I такт помещен внутри обмотки которая подкпю чена параллельно к источш.ку переменного тока, на корпусе установлен вспомогатель ный постоянный магнит, регулируемый относнтел.но магнитоуправляемого контакта, а его полярность имеет встречное направление относительно полярности основного магнита. Это позволяет получнть информацию а по- ложенни затвора на всем пути его движения, регулировать начальный ток, иметь биполярный выходной сигнал и пропорциональную выходную характеристику ( за счет подключения к источнику пилообразного напряжения). На фкр. 1 изображен предлагаемый деггчкк, продольный разрез А-А; на фиг. 2то же, вид сверху; на фяг. 3 - график работы датчика.
Датчнк вкгючает герметичный немагнит|ный корпус 1, внутри которого перемещает;ся яостоянный к-агнит 2, одновременно выполняющий роль ползуна, поджимаемого к штоку 3 пружиной 4. Снаружи корпуса 1 Jacпoлoжeн вспомогательный постоянный магнит 5, положение которого относительно магшта 2 регулируете я (виятом 6, и обмот |ка 7, намотанная на магннтоуправляемый контакт 8, выходной сигнал от которого снимается измерительным прибором 9.
Дчтчик работает следующим образом.
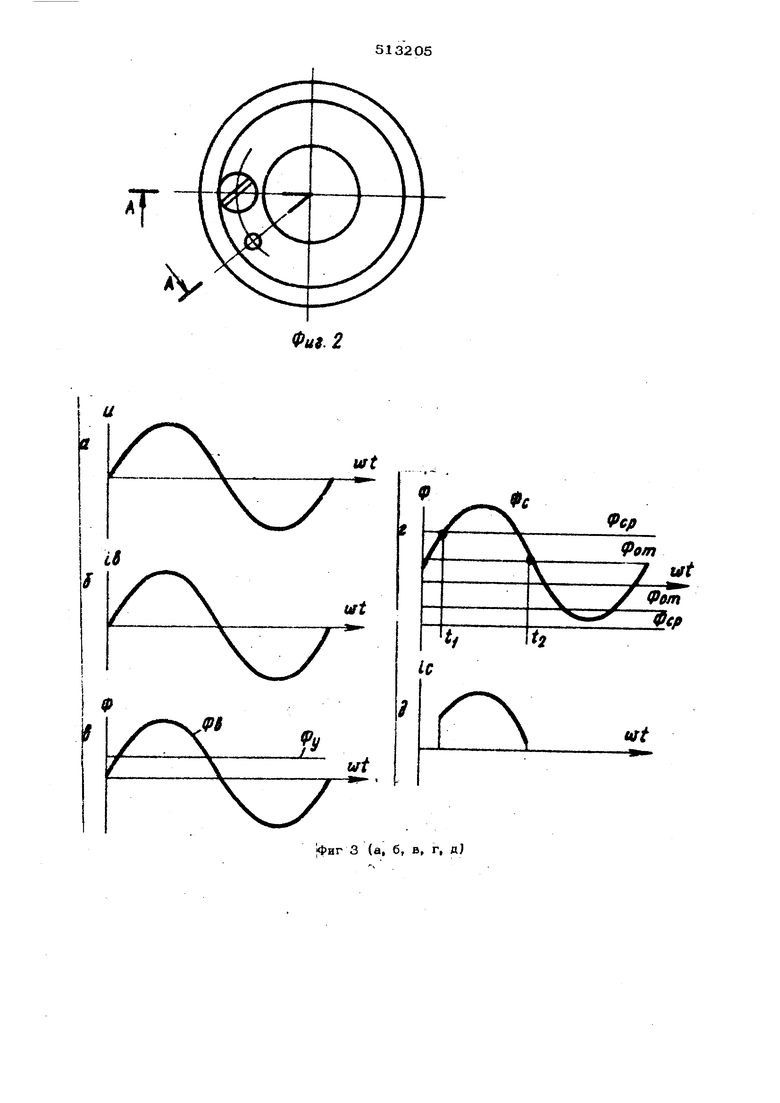
На магнитоуправтшемый контакт воздей™ ствует магнитный поток возбуждения Ф
(фиг. Зв), создаваемый переменным током {фиг. За, б), проходящим по обмотке 7, причем, меньший по величине, чем необход мый для срабатывания магнитоуправляемого
контакта Ф Постоянный магнит 2 созд Iср.
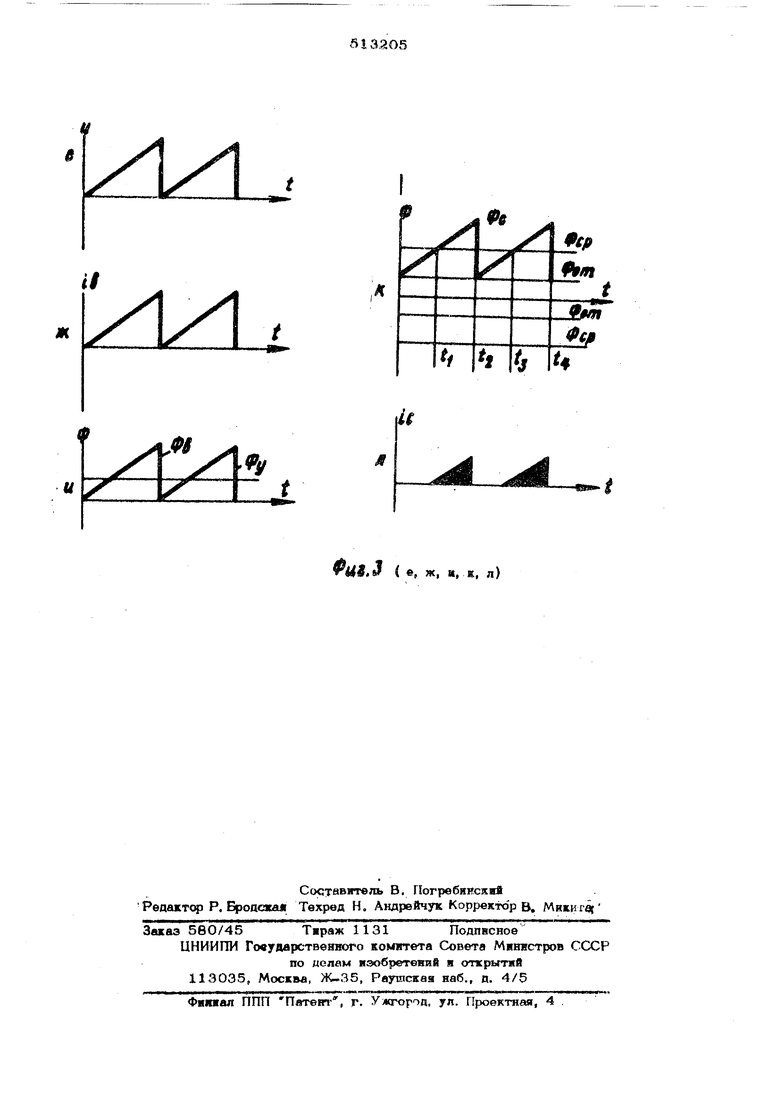
ет поток управления Фу (фиг. Зв), напра - ленный встречно потоку возбуждения Фв 51 при прохождении отрицательной полуволны тока и попутно- при аоложктельной оолуволве.- . При прохождении положнтельвой полу8о/4. ны тока (фиг. Зг) через обмотку 7 потоки в у складываются, а суммарный поток достаточен для срабатывания магнитоуправляемого контакта; пря отрицательной полуволне потоки Ф и Фу вычитаются Магнигоуправляемый контакт остается раэом кнутым. Таким образом при прохождении положительной полуволны тс«а в период времени or 1 (когда ) ДО fjy,когдаФс Фр (потоку отпускания магннтоуправляемого контакта), - последний замкнут (фиг. Зг и Зд). При движении магнита 2, например, под действием среды вверх либо вниз изменяет ся величина потока управления Фу магнита 2 возле магнитоуправляемого контакта, что изменяет время, при котором он замкнут. Чем больше поток управления, тем раньше наступает момент замыкания и позже размы кание магнитоуправляемого контакта. Следовательно каждому положению магни та 2 соответствует своя длительность тока, проходящего через магнитоуправляемый контакт, среднее значение которого фиксирует ся измерительным прибором 9. Перемещением вспомогательного магнита 5 винтом 6 усиливается либо ослабляется поток упра&пения Ф. что позволяет устанавливать качальный ток. например -ток, при котором iipo ход открыт. При расположении вспомогате/шного магнита 5 так, чтобы его полярность была направлена встречно полярности магнита 2, положительному значению выходного тока будет соответствовать, например, положение, 5 когда проход открыт, а отрицательному заврыт. Однако в среднем положении выходная характернее .оса имеет скачок тока, вносиашй некоторую неопределенность. Для резкого уменьшения скачка входной характернствхи датчшс подключен к источнику пилообразнотч) напряженна. В такой же последовательности как к при питании датчика синусоидальным напр. жением иаложеи прннинп работы датчика при питанни пилообразным напряжением на . 3 е 3л. Формула изобре те н и я 1.Датчик положения затвора клапана, -в герметичной полости корпуса которого установлены обмотка и постоянный магнит, (Воздействующий своим полем на магннтоу равляемый контакт, отличающийс я тем, что, с целью получения ииформа они на всем пути движения затвора, магнвтоуправляемый контакт помещен внутри обмотки, которая подключе ад параллельно к источнику переменного тока, 2.Датчик по п, 1, о т ч а ю щ я тем, что, с целью регулировки начального тока, в корпусе установлен вспомогателл ный постоянный магнит, рег5лируемый относительно магнитоуправляемого контакта, 3. Датчшс по пп.1и:г, отличающийс я тем, что, с целью получения биполярного выходного сигнала, вспомогательный постоянный магнит установлен так,что его полярность имеет встречное направление относительно полярности основного магнита. 4. Датчик по п. 1, отличающиЛс я тем, что, с целью получения пропорциональной выходной характеристики, он подключен к источнику пилообразного напряжет ния. Фиг. i
Фи9.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Сигнализатор перемещения | 1984 |
|
SU1246170A1 |
| Сигнализатор положения | 1984 |
|
SU1247962A1 |
| ИНТЕГРАЛЬНЫЙ ГРАДИЕНТНЫЙ МАГНИТОТРАНЗИСТОРНЫЙ ДАТЧИК | 2010 |
|
RU2453947C2 |
| ЭЛЕКТРОМАГНИТНЫЙ КЛАПАН | 2003 |
|
RU2243441C1 |
| Датчик углов наклона | 1974 |
|
SU513249A1 |
| Коммутирующее устройство реле времени | 1972 |
|
SU478373A1 |
| Устройство для контроля наличия магнетитовой руды на ленте конвейера | 1982 |
|
SU1016246A1 |
| ПЕРЕКЛЮЧАЮЩЕЕ УСТРОЙСТВО | 1972 |
|
SU331440A1 |
| Преобразователь перемешения в длительность импульсов | 1976 |
|
SU559258A1 |
| Бесконтактный датчик положений рабочего органа механизмов | 1974 |
|
SU491898A1 |
9cp
ic
C
3
vt
zl/Ь
g
L/lzl.
y
, J ( e, Ж, H, K, л)
