1
Изобретение относится к области измерения параметров движения.
Известный бесконтактный датчик положений рабочего органа механизмов по авт. св.. 362789 не позволяет регулировать положение точки срабатывания в обе стороны от исходного положения.
Цель изобретения - расширение диапазона дистанционного регулирования точки срабатывания датчика.
Для этого предлагаемый датчик снабжен диодом, анод которого через нормально открытый контакт реле контроля подключен к точке соединения нормально закрытого контакта дополнительного реле и магнитоуправляемого контакта, а катод - к выходу обмотки подмагничивания, и резистором, образующим с резистором цепи регулирования мост.
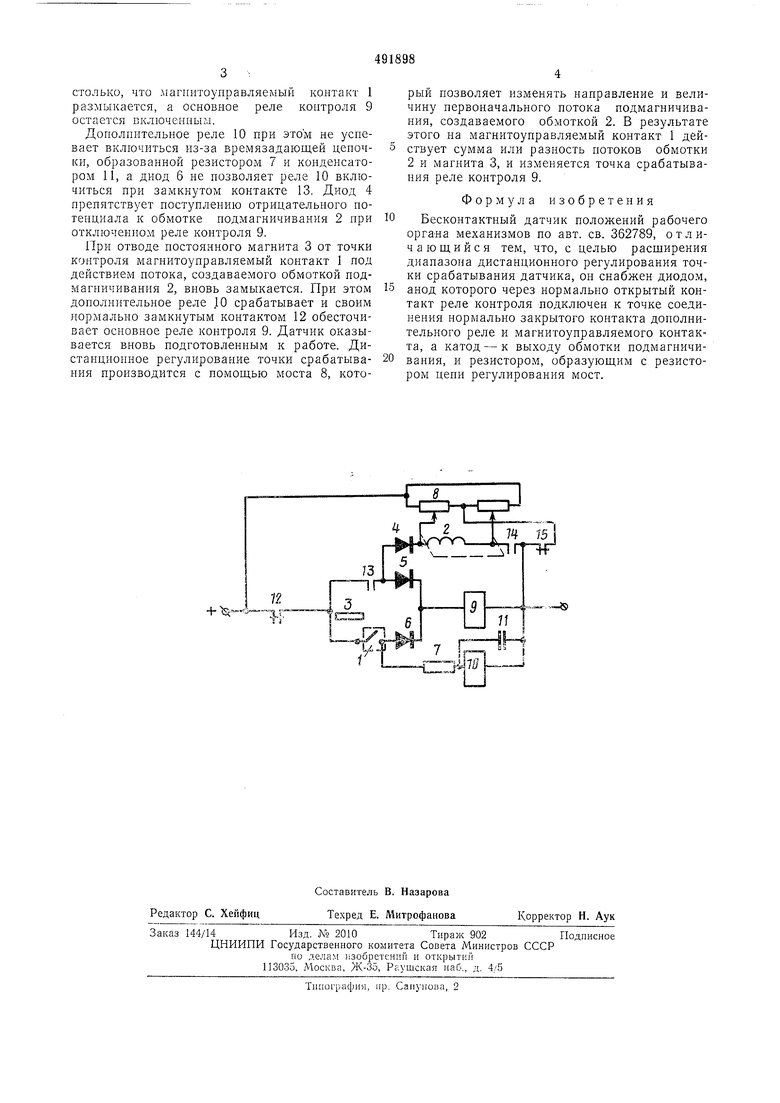
На чертеже приведена принципиальная схема описываемого устройства.
Устройство содержит магнитоуправляемый контакт 1, обмотку подмагничивания 2, постоянный магнит 3, диоды 4, 5, 6, ограничивающий резистор 7, регулируемый мост 8 постоянного тока, реле контроля 9, дополнительное реле 10, конденсатор 11, нормально закрытый контакт 12 дополнительного реле 10, нормально открытые контакты 13, 14 и нормально закрытый контакт 15 реле контроля 9. Устройство работает следующим образом.
При отсутствии постоянного магнита 3 в точке контроля магнитоуправляемый контакт 1 разомкнут. Обмотки основного реле контроля 9 и дополнительного реле 10 обесточены. По обмотке подмагничивания 2 протекает ток, поступающий с моста 8 постоянного тока, который питается через нормально закрытый контакт 15 реле контроля 9. При этом поле, создаваемое обмоткой подмагничивания 2, направлено встречно или согласно с полем постоянного магнита 3 в зависимости от полярности напряжения, поступающего с выхода регулируе.vioro моста 8. Ток через обмотку подмагничивания 2 может быть выбран от нуля до близкого к току срабатывания магнитоуправляемого контакта 1.
При подходе постоянного магнита 3 к положению срабатывания магнитоуправляемого
контакта 1 поток его, составляющий сумму или разность с потоком обмотки 2, вызывает замыкание магнитоуправляемого контакта 1. Реле контроля 9 срабатывает и через нор.мально замкнутый контакт 12 дополнительного реле 10 и нормально разомкнутый контакт 13 самоблокируется. Контакты 14 и 15 реле контроля 9 переключаются, и по обмотке подмагничивания 2 начинает протекать ток. поле которого будет направлено встречно полю постояьного магнита 3, К01мпе сируя его на
столько, что .магпитоуправляемыр контакт 1 размыкается, а основное реле контроля 9 остается включенным.
Дополнительное реле 10 при этом не усневает включиться из-за времязадающей ценочки, образованной резистором 7 и конденсатором 11, а диод 6 не позволяет реле 10 включиться при замкнутом контакте 13. Диод 4 препятствует поступлению отрицательного нотенциала к обмотке нодмагннчнвания 2 при отключенном реле контроля 9.
При отводе ностоянного магнита 3 от точки контроля магнитоунравляемый контакт 1 под действием потока, создаваемого обмоткой подмагничивання 2, вновь замыкается. При этом донолнительное реле 10 срабатывает и своим нормально замкнутым контактом 12 обесточивает основное реле контроля 9. Датчик оказывается вновь подготовленным к работе. Дистанционное регулирование точки срабатывания производится с номощью моста 8, который позволяет изменять направление и величину первоначального потока подмагннчивания, создаваемого обмоткой 2. В результате этого на магнитоуправляемый контакт 1 действует сумма или разность потоков обмотки 2 и магнита 3, и изменяется точка срабатывания реле контроля 9.
Формула изобретения
Бесконтактный датчик положений рабочего оргаиа механизмов по авт. св. 362789, отличающийся тем, что, с целью расширения диапазона дистанционного регулирования точки срабатывания датчика, он снабжен диодом, анод которого через нормально открытый контакт реле контроля подключен к точке соединения нормально закрытого контакта дополнительного реле и магнитоуправляемого контакта, а катод - к выходу обмотки подмагничивания, и резистором, образующим с резистором цени регулирования мост.
| название | год | авторы | номер документа |
|---|---|---|---|
| Бесконтактный датчик положений рабочего органа механизма | 1977 |
|
SU708232A1 |
| Путевой выключатель | 1978 |
|
SU855777A1 |
| Устройство для управления работой путевого выключателя | 1977 |
|
SU700879A1 |
| Датчик положений рабочего органа механизма | 1979 |
|
SU873132A1 |
| Устройство для управления работой путевого выключателя | 1979 |
|
SU807878A1 |
| БЕСКОНТАКТНЫЙ ДАТЧИК ПОЛОЖЕНИЙ РАБОЧЕГО ОРГАНА МЕХАНИЗМОВ | 1973 |
|
SU362789A1 |
| Бесконтактный датчик положения рабочего органа механизма | 1975 |
|
SU676859A1 |
| Устройство для управления работой путевого выключателя | 1975 |
|
SU613416A1 |
| Устройство для управления работойпуТЕВОгО ВыКлючАТЕля | 1979 |
|
SU805437A1 |
| Бесконтактный путевой выключатель | 1973 |
|
SU529502A1 |
+
f I . г-Ы 7у
(ияиих- - I
