Изобретение относится к способам регистрации работы различных электромагнитных механизмов, являющихся приводами клапанов, вентилей, задвижек и т. д., которые находят широкое применение в различных отраслях промышленности. Известен электромагнитный кланан, выполненный в виде размеш,енных в магнитопроводе управляюп1их обмоток и якоря, снабженный постоянным магнитом и сигнализатором положения якоря (магнитоуправляемый контакт) 1, а также импульсный электромагнитный привод, в который введен сигнализатор положения якоря в виде катушки индуктивности, сердечником которой является участок магиитопровода из быстронасыш,аюн;егося магнитного материала. Известен также электромагнитный сигнализирующий клапан, содержащий кроме катушки управляющего электромагнита, якорем которой является плунжер клапана, дополнительную катушку электромагнита, которая расположена над катушкой управляющего электромагнита 3. Недостатками перечисленных технических решений контроля является необходимость конструктивного вмешательства в устройства электромагнитных механизмов, что приводит к низкой надежности работы механизмов, к их удорожанию, невозможности использования серийно выпускаемых электромагнитных механизмов без их переделки. Известен также способ контроля, основанный на изменении формы прямоугольных импульсов при их прохождении через обмотку электромагнита. При этом контроль осуществляют подсчетом количества прямоугольных импульсов, получаемых при усилении и ограничении отрицательной части выходного имиульса 4. Этому способу присуща недостаточная точность контроля ноложення якоря, так как затрудннтельно контролировать ход якоря на всем иути его движения из-за существенной нелинейности зависимости напряжения на катушке с ферромагнитным сердечником от тока. Цель изобретения - повышение точности контроля положения якоря на всем пути его движения. Это достигается тем, что через обмотку электромагнита пропускают дополиительные импульсы напряжения с частотой, превьпнающей частоту основных питающих импульсов, а о положении якоря судят но величине изменения амплитуды дополнительных импульсов. Способ основан на известном положении о том, что индуктивность катушки электромагиита при прочих неизменных величииа.х определяется магнитным сопротивлением участка
между якорем электромагнита и его сердечником. При движении якоря электромагнита к сердечнику изменяются магнитное сопротивление этого участка и индуктивность катушки (она возрастает), а также индуктивное сопротивление катушки, что ведет к изменению амплитуды дополнительных импульсов, пропускаемых через катушку. Пропускание дополнительных импульсов с частотой, превышаюш,ей частоту основных питающих импульсов, необходимо для уменьшения задержки сигнала при контроле хода якоря, а кроме того, при этом меньше нагружается источник дополнительных импульсов, так как индуктивное сопротивление с ростом частоты возрастает и ярче проявляется зависимость индуктивного сопротивления от величины хода якоря.
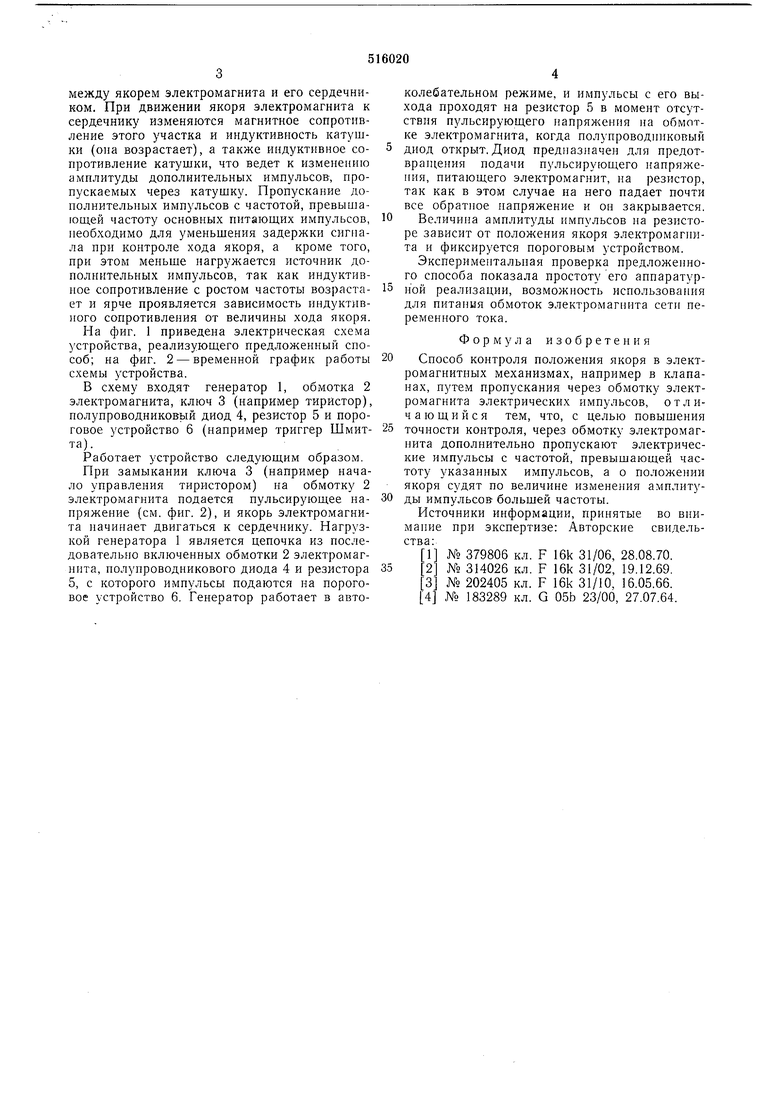
На фиг. 1 приведена электрическая схема устройства, реализующего предложенный способ; на фиг. 2 - временной график работы схемы устройства.
В схему входят генератор 1, обмотка 2 электромагнита, ключ 3 (например тиристор), нолупроводниковьш диод 4, резистор 5 и пороговое устройство 6 (например триггер Шмитта).
Работает устройство следующим образом.
При замыкании ключа 3 (например начало управления тиристором) на обмотку 2 электромагнита подается пульсирующее напряжение (см. фиг. 2), и якорь электромагнита начинает двигаться к сердечнику. Нагрузкой генератора 1 является цепочка из последовательно включенных обмотки 2 электромагнита, нолупроводникового диода 4 и резистора 5, с которого импульсы подаются на пороговое устройство 6. Генератор работает в автоколебательном режиме, и импульсы с его выхода проходят па резистор 5 в момент отсутствия пульсирующего напряжения на обмотке электромагнита, когда полупроводниковый диод открыт. Диод предназначен для предотвраи1е1тя подачи пульсиру ощего напряжения, питающего электромагнит, на резистор, так как в этом случае на пего падает почти все обратное напряжение и он закрывается.
Величина амплитуды импульсов на резисторе зависит от положения якоря электромагнита и фиксируется пороговым устройством.
Экспериментальная проверка предложенного способа показала простоту его аппаратурной реализации, возможность использования для питания обмоток электромагнита сети переменного тока.
Формула изобретения
Способ контроля положения якоря в электромагнитных механизмах, например в клапанах, путем пропускания через обмотку электромагнита электрических импульсов, отличающийся тем, что, с целью повышения
5 точности контроля, через обмотку электромагнита дополнительно пропускают электрические импульсы с частотой, превышающей частоту указанных импульсов, а о положении якоря судят по величине изменения амплитуды импульсов большей частоты.
Источники информации, принятые во внимание при экспертизе: Авторские свидельства:
№ 379806 кл. F 16k 31/06, 28.08.70.
№ 314026 кл. F 16k 31/02, 19.12.69. № 202405 кл. F 16k 31/10, 16.05.66. № 183289 кл. G ОБЬ 23/00, 27.07.64.
Г
Ж
. /
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для электроискрового легирования | 1979 |
|
SU1006146A1 |
| Сигнализатор положения якоря электромагнитных механизмов | 1977 |
|
SU637791A1 |
| Автоматическое устройство для намагни-чиВАНия и РАзМАгНичиВАНия | 1979 |
|
SU847381A1 |
| УСИЛИТЕЛЬ МАГНИТНОГО ПОТОКА И СИЛОВЫЕ ЭЛЕКТРОТЕХНИЧЕСКИЕ УСТРОЙСТВА НА ЕГО ОСНОВЕ | 2000 |
|
RU2201001C2 |
| Управляемый электромагнитный вибратор | 1982 |
|
SU1030044A1 |
| Вискозиметр | 1977 |
|
SU693154A1 |
| Электропривод переменного тока со встроенным тормозом | 1986 |
|
SU1374387A1 |
| РАСХОДОМЕР САСОВА | 1993 |
|
RU2117254C1 |
| ЭЛЕКТРОННЫЙ ХОМУС | 2012 |
|
RU2498418C2 |
| СПОСОБ ЗАЩИТЫ ЭЛЕКТРОУСТАНОВКИ ОТ НЕДОПУСТИМЫХ ИЗМЕНЕНИЙ ПИТАЮЩЕГО НАПРЯЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2190289C2 |
обмотки
