(54) ВИСКОЗИМЕТР

| название | год | авторы | номер документа |
|---|---|---|---|
| Сигнализатор положения якоря электромагнитных механизмов | 1977 |
|
SU637791A1 |
| Цифровой измеритель отношения давлений в двигателе внутреннего сгорания | 1977 |
|
SU750300A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ВРЕМЕНИ СРАБАТЫВАНИЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2773298C1 |
| Устройство для управления тяговым электроприводом постоянного тока транспортного средства | 1984 |
|
SU1270039A1 |
| Устройство для контроля работы электромагнита | 1988 |
|
SU1522160A1 |
| Устройство для управления электромагнитом | 1985 |
|
SU1295459A1 |
| Устройство для контроля уточной нити | 1987 |
|
SU1444418A1 |
| КОЛЕБАТЕЛЬНЫЙ ВИСКОЗИМЕТР | 1973 |
|
SU369468A1 |
| Устройство для управления электромагнитом | 1989 |
|
SU1617472A1 |
| Устройство для управления электромагнитом | 1984 |
|
SU1247952A1 |

1
Изобретение относится к приборам для измерения вязкости различных жидкостей, расплавленных металлов и пульп, в том числе кристаллизующихся.
Известно устройство для измерения вязкости жидкости, содержаш,ее рабочее тело, устройство, подъема этого тела и измеритель времени падения рабочего тела в исследуемой жидкости 1.
Однако погрешность измерения устройства весьма значительна. Кроме того, оно работоспособно лишь при исследуемых средах, не содержащих твердых частиц, измерение вязкости расплавленных металлов, кристаллизующихся жидр остей и пульп невозможно.
Известен также шариковый визкозиметр, содержащий рабочее тело, электромагнит, коммутатор тока электромагнита, датчик положения рабочего тела и измеритель времени падения рабочего тела, включающий два триггера, вторичный прибор, вход которого соединен с выходом первого триггера, а вход первого триггера подключен к первому выходу датчика положения рабочего тела 2. Показания вторичного
прибора зави(ят не только от вязкости исследуемой среды, но и от величины избыточного давления в трубопроводе с исследуемой средой, поскольку время падения рабочего тела в незаполненном участке трубы
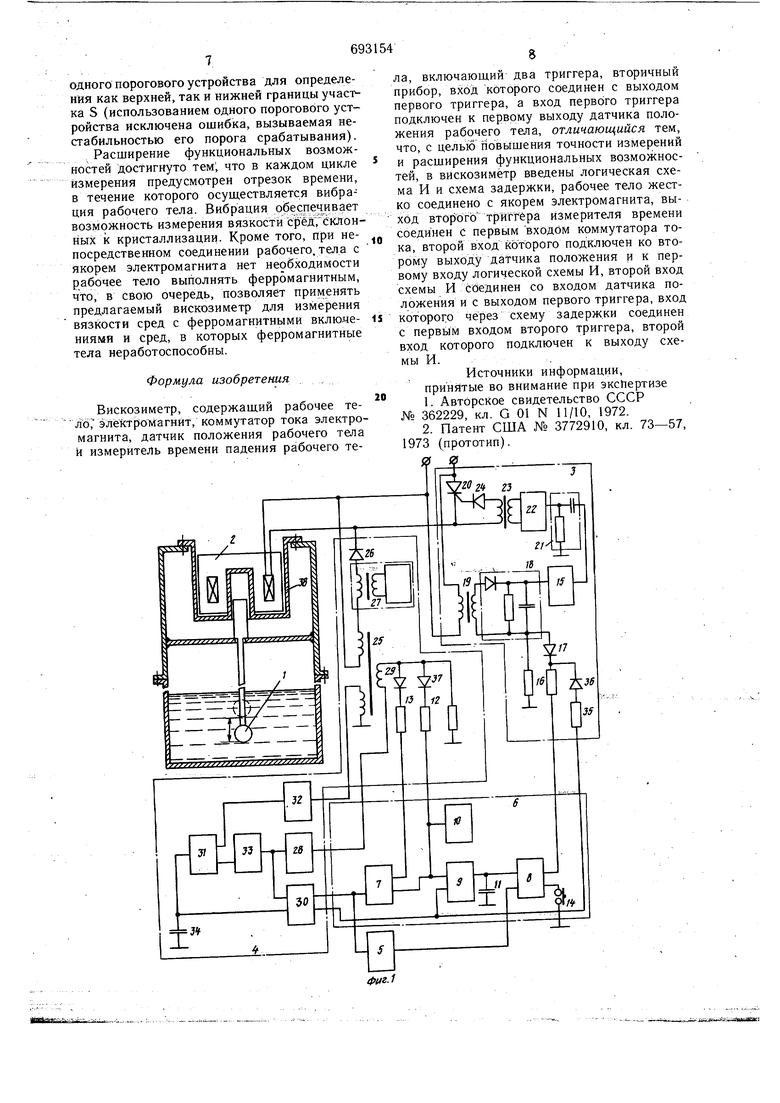
предполагается неизменным, а в действительности длина этого участка, а следовательно, и время падения рабочего тела над исследуемой средой, зависят от величины избыточного давления в трубопроводе. Алгоритмом функционирования известного устройства не предусматривается выделения времени разгона tp (tp - время, за которое скорость рабочего тела, при падении его в исследуемую среду, достигает установивщегося значения), что вызывает нелинейность выходной характеристики. Дополнительную нелинейность выходной характеристики устройства вызывает и использование в немв качестве датчика положения рабочего тела индукционных катушек. Точность определения положения такими катушками недостаточна, поскольку величина еигнала, снимаемого с катушки; зависит не только от расстояния рабочего тела от катущки, но и от скорости перемещения рабочего тела. Цель изобретения - повышение точности измерений и расширение функциональных возможностей. Это достигается тем, что в вискозиметр введены логическая схема И и схема задержки, рабочее тело жестко соединено с якорем электромагнита, выход второго триггера измерителя времени соединен с первым вхо-. дом коммутатора тока, второй вход которого подключен ко второму выходу датчика положения и к первому входу логической схемы И, второй вход схемы И соединен со « «„входом датчика положения и с выходом первого триггера, вход которого через схему задержки соединен с первым входом второго триггера, второй вход которого подключен к выходу схемы И. На фиг. 1 приведена принципиальная схема пpeдлa aeмoгo вискозиметра; на фиг. 2 - временные диаграммы, поясняюшие его работу. Вискозиметр (см. фиг. 1) содержит рабочее тело 1, жестко соединенное с якорем электромагнита 2, обмотка которого включена последовательно с коммутатором 3 тока обмотки электромагнита и с датчиком 4 положения рабочего тела, схему 5 задержки и измеритель 6 времени падения рабочего тела, включаюший первый и второй триггеры 7 и 8 соответственно, логическую схему И 9, вторичный прибор 10 и конденсатор 11. Работа предлагаемого вискозиметра основана на измерении вязкости по методу Стокса, т. е. путем измерения времени ttu перемещения рабочего тела в исследуемой среде с установившейся скоростью. При этом вязкость fj связана линейной зависимостью с величиной t, т. е. . Величина коэффициента К зависит от разности плотности исследуемой среды и рабочего тела, от ускорения силы тяжести, от размеров рабочего тела и от расстояния S, преодолеваемого рабочим телом за время 1„. Расстояние S постоянно и составляет приблизительно 80% хода якоря, причем, верхЧяя г{ анйЦа участка S выбрана так, что расстояние между якорем и статором (неподвижная часть магнитной системы электромагнита 2) составляет около 15% хода якоря, а при цижней границе участка S вышеупомянутое расстояние составляет приблизительно 95% хода якоря. Величина S в широких пределах регулируется резисторами 12 и 13 датчика 4. Сопротивлением резистора 12 задается верхняя граница участка S (т. е. время tp), а сопротивлением резистора 13 - нижняя граница этого участка. Работа вискозиметра заключается в сле дующем. При нажатии на кнопку 14 (момент времени tt.Ha фиг. 2) триггер 8 перебрасывается в состояние «1. Напряжение, подаваемое с триггера 8 на вход формирователя 15 через резистор 16 и диод 17, суммируется с напряжением ячейки 18, запитываемой от синхронизирующего трансформатора 19. Выходное напряжение ячейки 18 положительно, а форма его во время положительной полуволны питающей сети (полуволны, во время которой открывается тиристор 20) близка к линейной. Поскольку напряжение на выходе ячейки 18 положительно, то до подачи отрицательного напряжения (сигнала «1) с выхода триггера 8 импульсы на выходе формирователя 15 отсутствуют. После переброса триггера 8 в состояние «1 суммарное напряжение на входе формирователя 15 (триггер Шмитта) достигает величины порога срабатывания этого формирователя и на его выходе появляются прямоугольные импульсы с частотой 50 Гц (частота питающей сети). После дифференцирования импульсов формирователя 15 дифференцирующей цепочкой 21 и усиления усилителем 22 отрицательнь1х импульсов, получаемых на выходе цепочки 21, на вторичной обмотке импульсного трансформатора 23 формируются импульсы управления тиристором 20. Эти импульсы подаются на управляющий электрод тиристора 20 через диод 24. Фаза управляющих импульсов совпадает с фазой переднего фронта прямоугольных импульсов на выходе формирователя 15 и при прочих равных условиях зависит от сопротивления резистора 16. Эта фаза определяет величину напряжения, подаваемого на обмотку электромагнита 2. С момента ti якорь электромагнита плавно перемещается вверх, соверщая за каждый период питающей сети одно возвратно-поступательное движение (при открытом тиристоре 20 якорь втягивается вверх на величину hi. Во время отрицательной полуволны питающего напряжения, т. е. при обесточенной обмотке электромагнита 2, якорь и рабочее тело под действием собственного веса перемещаются вниз на расстояние hj, причем hi hi, поэтому с момента ti за каждый период питающей сети якорь перемещается вверх на расстояние, равное разности (hj- hz). По мере перемещеция якоря вверх индуктивность обмотки электромагнита увеличивается, а. амплитуда импульсов на вторичных обмотках трансформатора 25, подаваемых через обмотку электромагнита и диод 26 от генератора 27 (например, автоколебательного блокинг-генератора), уменьщается (см. фиг. 2). В момент ti рабочее тело достигает верхней границы участка S, а напряжение на входе формирователя 28, состоящее из постоянной составляющей, поступающей со второго выхода триггера 7 через резистор 13 и диод 29, и переменной составляющей генератора 27, окажется меньше порога срабатывания формирователя 28. При этом исчезнут импульсы на выходе формирователя 28 (триггер Шмитта), а триггер 30 перебросится в состояние «;1 выходным импульсом логической схемы И 31. До момента U с выходов обоих формирователей 28 и 32 поступают импульсы с частотой генератора 27 (частота этого ге.нератора на много больше частоты питающей сети); однако эти импульсы проходят только на второй вход триггера 30, удерживая этот триггер в состоянии «О. На первый вход триггера 30 до момента it. импульсы от формирователя 32 через схему 31 не проходят вследствие того, что одновременно с сигналом «1, поступающим на первый вход схемы 31 от формирователя 32, с выхода инвертора 33 на второй вход схемы 31 поступает сигнал «О. Конденсатор 34 предотвращает возникновение кратковременного импульса помехи, который до момента tz. может при отсутствии этого конденсатора возникнуть на выходах триггера 30 на время 1n.i, причем, Wi 3 + taj, где tji и ij} - время срабатывания соответственно схемы 31 и инвертора 33. В момент tt на втором выходе датчика 4 появляется сигнал «О, а с первого выхода датчика 4 на схему 5 задержки поступает сигнал «1. Сигналом «О датчика 4 через резистор 35 и диод 36 уменьщается напряжение на входе формирователя 15 (уменьшается ток обмотки электромагнита 2). При этом якорь электромагнита и соединенное с ним рабочее тело начинают вибрировать с частотой 50 Гц. Во время вибрации величины hi и hz равны между собой. С появлением сигнала «1 на выходе схемы 5 задержки (момент tj на фиг. 2) триггер 8 перебрасывается в состояние «О, в результате чего исчезает отрицательное напряжение на входе формирователя 15, обмотка электромагнита обесточивается, а якорь и рабочее тело начинают перемещаться в исследуемой среде вертикально вниз. По мере перемещения якоря вниз индуктивностьего обмотки уменьшается, а амплитуда импульсов на выходе трансформатора 25 цостигает величины, при которой на выхоае формирователя 28 появляются импульсы. Этими импульсамн триггер 30 перебрасывается в состояние «1, а положительным перепадом его выходного сигнала триггер 7 переводится в состояние «1. При этом на выходе триггера 7 формируется передний фронт импульса t, задается нижняя граница участка S (путем уменьшения постоянной составляющей напряжения на входе формирователя 28), исчезают импульсы на выходе формирователя 28, а триггер 30 в момент tj (см. фиг. 2) перебрасывается в состояние «О. Постоянная составляющая напряжения на входе формирователя 28 изменяется при смене состояния триггера 7, с плеч которого си1;нал «1 поочередно подается либо через резистор 12 (при задании величины Ip, т. е. верхней границы участка S), либо через резистор 13 (при задании нижней границы участка S), сопротивление которого больше чем сопротивление резистора 12. Диоды 37 и 29, как и диоды 17 и 36 коммутатора 3, являются развязывающими. Время 1, на которое триггер 30 перебрасывается состояние «1 при прохождении рабочим телом верхней границы участка S, складывается из трех составляющих:ter + ( + эо, где tj и tjo - время срабатывания схем соответственно 7 и 30; 1з4 - время задержки сигнала «1, поступак)Щего с выхода схемы 31 на вход триггера 30, вызываемое наличием конденсатора 34. По мере прохождения рабочим телом участка S амплитуда импульсов на вторичных обмотках трансформатора 25 продолжает увеличиваться. По истечении времени t, (при прохождении рабочим телом нижней границы участка S) снова появляются импульсы на выходе формирователя 28 (порог срабатывания формирователя 32 выбран таким, что На его выходе импульсы есть при любом положении якоря), а триггер 30 в момент 1« уже на сравнительно длительное время перебрасывается в состояние «1. При этом триггер 7 перебрасывается в состояние «О (формируется задний фронт импульса t), уменьшается постоянная составляющая напряжения на входе формирователя 28, через логическую схему И. 9 триггер 8 перебрасывается в состояние «1, запитывается обмотка электромагнита, и цикл измерения повторяется. Длительность импульса trt. измеряется вторичным прибором 10. Конденсатор 11 предотвращает ложное срабатывание триггера 8 при кратковременном (на время te/-) перебросе триггера 30 в состояние «О. При отсутствии конденсаора 11 на выходе схемы 9 возникает импульс помехи, длительность которого , оставляет W , где i - время срабатывания схемы 9. Рубашка 38 предназначена для зашиты обмотки электромагнита от воздействия иследуемой среды. Большая точность в предложенном вискоиметре достигнута благодаря тому, что алгоритм функционирования предлагаемого вискозиметра предполагает, во-первых, выдеение разгона tp из всего времени перемещения рабочего тела, во-вторых, использование одного порогового устройства для определения как верхней, так и нижней границы участ ка S (использованием одного порогового устройства исключена ошибка, вызываемая нестабильностью его порога срабатывания). Расширение функциональных возможностей достигнуто тем; что в каждом цикле измерения предусмотрен отрезок времени, в течение которого осуществляется вибрация рабочего тела. Вибрация обеспечивает возможность измерения вязкости срд; склонных к кристаллизации. Кроме того, при непосредственном соединении рабочего, тела с якорем электромагнита нет необходимости рабочее тело выполнять ферромагнитным, что, в свою очередь, позволяет применять предлагаемый вискозиметр для измерения вязкости сред с ферромагнитными включениямя и сред, в которых ферромагнитные тела неработоспособны. Формула изобретения Вискозиметр, содержащий рабочее телб;электромагнит, коммутатор тока электромагнита, датчик положения рабочего тела и измеритель времени падения рабочего те0ла, включающий два триггера, вторичный прибор, вход которого соединен с выходом первого триггера, а вход первого триггера подключен к первому выходу датчика положения рабочего тела, отличающийся тем, что, с целью повышения точности измерений и расщирения функциональных возможностей, в вискозиметр введены логическая схема И и схема задержки, рабочее тело жестко соединено с якорем электромагнита, выход второго триггера измерителя времени соединен с первым входом коммутатора тока, второй вход которого подключен ко второму выходу датчика положения и к первому входу логической схемы И, второй вход схемы И соединен со входом датчика положения и с выходом первого триггера, вход которого через схему задержки соединен с первым входом второго триггера, второй вход которого подключен к выходу схемы И. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 362229, кл. G 01 N 11/10, 1972 2.Патент США № 3772910, кл. 73-57, 1973 (прототип).
LATLA jv
JVT.
tf
