(54) ИНТЕРФЕРЕНЦИОННЫЙ СПОСОБ МЗМЕРЕНИЯ КИНЕМАТИЧЕСКОЙ ПОГРЕШНОСТИ МЕХАНИЗЛ ОВ В РАБОТЕ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения кинематической погрешности механизмов | 1981 |
|
SU1013752A1 |
| Устройство для измерения кинематической погрешности механизмов | 1977 |
|
SU678274A1 |
| СПОСОБ ИЗМЕРЕНИЯ ФАЗОВОГО СДВИГА ПРОЗРАЧНОГО ОПТИЧЕСКИ АНИЗОТРОПНОГО ОБРАЗЦА | 2000 |
|
RU2184365C2 |
| Интерференционное устройство для измерения угловых перемещений | 1990 |
|
SU1770741A1 |
| Устройство для измерения шага точных винтов | 1980 |
|
SU953452A1 |
| ИНТЕРФЕРЕНЦИОННОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 1993 |
|
RU2095752C1 |
| Трехкристальный рентгеновский спектрометр | 1983 |
|
SU1146546A1 |
| ИНТЕРФЕРОМЕТРИЧЕСКОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2005 |
|
RU2307318C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕЙСТВИТЕЛЬНОГО ЗНАЧЕНИЯ ДЛИНЫ ВОЛНЫ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ | 1994 |
|
RU2083962C1 |
| Способ измерения параметров механизма | 1973 |
|
SU506758A1 |
..1. -, : : Иаобретение относится к измерительной технике, а именно к. спосс ам измерения кинематической и циклической погрешностей зубчатъ1х колес и угловых перемещений.
Извёстнь способы измерения кияематичес кой погрешности и углорых перемещений: механические, магнитрэлектрические, фотоэлектрические, сейсмические и оптические.
Из известных оптических способов измерения угловых перемещений более точным является Интерференционный. Этот способ заключается в том, что на вращающихся концевых звеньях механизма закрепляют отражатели света, а на его станине неподвижно закрепля1бт двухлучевой интерферометр, длину оптических плеч которого ограничивают отражателями, и измеряют угол поворота рычага по смещению интёрферен- иионной картины.
Этот способ имеет малый диапазон из- меряемого угла поворота рычага, поэтому его нельзя применять для непрерывного измерения кинематической погрешности механизмов с вращающимися концевыми звеньями на полном их обороте. Недостаток этот
обусловлен физическими особекн-тстями ин- терференцион№1х измереннй{ большой угчзл поворота рычага вызывает такую большую разность оптических пу.тей дкух. лучей- интерферометра, что их интер(рё1щияр бе-лом свете невозможна,. а интерфе;р.енция в монохроматическом свете не дает чадеж- цых результатов измерения.
, Целью изобретения является повышение ;ТЬчности измерения, т.е. обеспечение не-; прерывного измерения килсматггчеокой по- ;грешности мехшдаэмов на полном оборота IHX звеньев. - /-,
Дг этого отражатели располагак на . ;:равных расстояниях от осей вращения концевых звеньев Механизма и закрепляют их в одинаковых фазах движения относительно интерферометра.
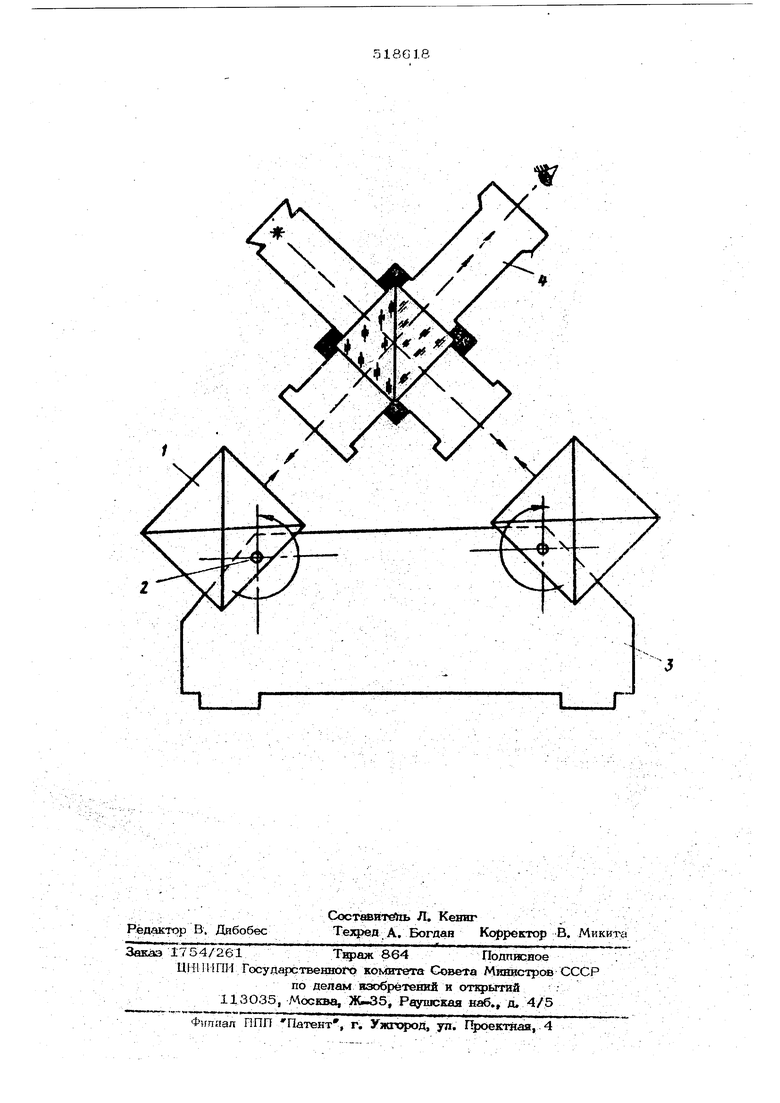
На чертеже изображена оптическая схема реализации предложенного способа.
Схема содержит отражатели 1, выполненные в виде счетвере шых уголковых отражателей, концевые звенья 2 контролируемого механизма 3, двухлучевой интерферометр 4.
Устетавливают два отражателя 1, например счетверенные уголковые отражатепи, ПО одному яа каждом из коип5Ььгх авельев 2 (ведомом и Еюдушим) контролируемого механизма 3, Закрепляют двухлучевой ин терферометр 4 на неподвижном основании (на схеме не показано).
После этого устанавливают отрвжателн на конпевых звеньях механизма на oaHHaiковых расстояниях от осей врашення, ограничивая тем самым длины оптических . ппеч интерферометра. Затем закрепляют о-фа сатели в одинаковых фазах движения их относитепыю интерферометра, уравнивая этим оптические пути Двух его пучей.
Приводят звенья механизма, в непрерванное движение и наблклдают перемощение интерференционных попос, которое будет иметь место при нарущс: .ии равенства оптических путе интерферометра, которое цаблюдьутся при кинематической погрешности; т.е. некоторой небощьШой разности между перемкшениями кОнцев1лх звеньев механизма, нмсюшего номинплы ое переде- точное отношение, равное единице.
В} пшсляют разность длины плен интерферометра, возникшую в результате лрояв- пакия кинематической погрешности на данном угле поворота, и известными приемам
пересчитывают ее на кинекатическую погрешность
Многочисленные экспернментальт11е данные показали, что точность кзмерения но данному способу вьпие, нежели известными способами и устройствами, основаны на этих способах.
Ф
о р м у я а я зоб р е т
е н ив
Интерференционный способ измерения кинематической погреиюости механизмов в работе, имеющих передаточное отношение равщх) единице, закпючаюшибря в тОм, что .на вращающихся концевых мехаввэма закрепляют отражатели, света, п на e станине неподвижно закрепляют двухлуче- вой интерферометр,длкну оптических плеч которого ограничивают отражателямн, и измерякуг им однов| емешго углы поворота обоих звеньев а rto смей1еннк) интпрфс реннионнов судят о киаематической погрешности мехаивзмов, о т пи ч а loш н ft с я тем, что, с Делью П1 иышения ТОЧ1ГОСТИ измереося, отражатели распбпагают на равных расстоягшях от осей вращения концевых звеньев и закре1ш;шрт их в одинаковьис фазах движен ш относительно интерферометра.
