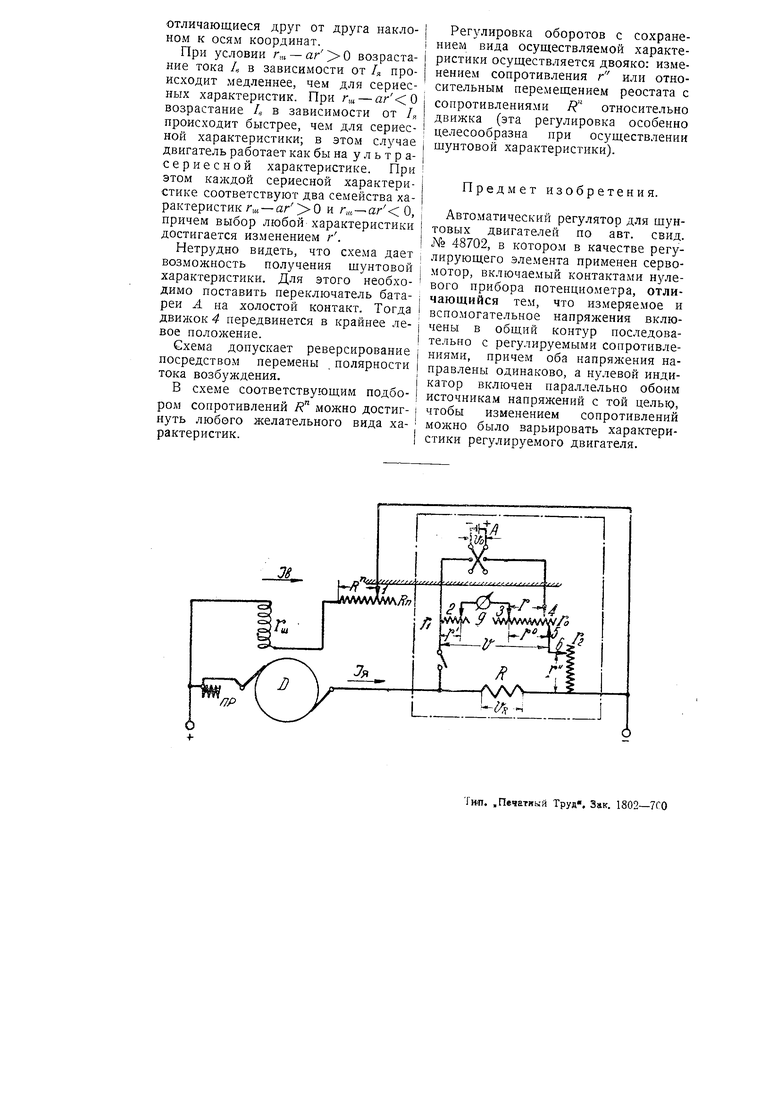
Предметом настоящего изобретения является автоматический регулятор для шунтовых электрических двигателей, являющийся усовершенствованием регулятора, описанного в авторском свидетельстве № 48702. В устройстве по авторскому свидетельству № 48702 в цепь регулируемого двигателя включался через регулируемое сопротивление и переключатель направления тока сервомотор в виде гальванометра специального типа, нагруженный регулировочной пружиной и служащий для автоматического-в соответствии с нагрузкой двигателя - изменения возбуждения последнего. Путем измен ния регулировки сервомотора, гальванометра и направления тока в одной из его обмоток достигалась pa6ota регулируемого двигателя на различных характеристиках. В предлагаемом регуляторе вместо гальванометра в качестве регулирующего элемента применен сервомотор, включаемый контактами нулевого прибора потенциометра. Для этого, согласно изобретению, измеряемое и вспомогательное напряжения включены в общий контур последовательно с регулируемыми сопротивлениями, причем оба напряжения направШйы одинаково, а нулевой индикатор включен параллельно обоим источникам напряжений. При этом характеристики регулируемого двигателя можно варьировать изменения сопротивлений. Поскольку упругие свойства всякой пружины изменяются с течением времени, постольку и настройка регулятора (по авт. свид. № 48702) должна с течением времени меняться. От этого недостатка свободен предлагаемый регулятор с автоматическим потенциометром. Сущность изобретения поясняется чертежом, на котором изображена принципиальная электрическая схема предлагаемого регулятора. В нижеследующем описании буквами с индексом внизу (Гц, rj, Гз и т. д.) обозначены соответствующие сопротивления схемы, а буквами с индексами вверху (г, г , г и т. д.) обозначены действующие части этих сопротивлений, т. е. те, которые введены в цепь. В цепи якоря регулируемого двигателя D находится сопротивление /. Параллельно с ним включены сопротивления г г„ и п, соединенные между собою последовательно. Между сопротивлениями r и r включен нуль-гальванометр g. Параллельно с цепью из - TO через переключатель полярности включена батарея аккумуляторов А, имеющая напряжение V. В цепи обмотки возбуждения находится регулировочное сопротивление Кп, движок 7 которого связан механически с движком 4 сопротивления г,,, так что одновременно с перемещением движка 4 происходит перемещение движка 7.
Эти перемещения осуществляются при помощи реверсивного сервомотора (не показанного на чертеже), включение которого на прямой или обратный ход, или выключение производится от стрелки нулевого прибора g.
При обозначенных, на чертеже полярностях ток от батареи А через гальванометр пойдет в направлении справа налево, т. е. обратно току якоря. При исходном положении схемы движок- стоит в крайнем правом положении. В случае появления в цепи якоря тока /„ на сопротивлении R создается падение напряжения, равное . При этом сопротивления i4-о+ з считаются достаточно большими для того, чтобы можно было пренебречь ответвлением в них тока якоря, т. е. считаем, что ток, идущий через сопротивление R, равен полному /«. Это падение напряжения распределяется по сопротивлениям г , г° и г пропорционально абсолютным значениям последних.
Обозначим ту часть падения напряжения, которая падает на сопротивление r-j-r, через V. Когда абсолютное значение V станет равным абсолютному значению V (напряжению батареи), то в цепи нуль-прибора g тока не будет, так как полярности V н Vo обратны. При дальнейшем увеличении /я напряженке V станет больше VQ и ток в цепи нульнрибора совпадет по направлению с током /я.
Контакты на нуль-приборе устроены так, что при этом движок 4 посредством сервомотора передвинется в сторону уменьшения г, т. е. в сторону компенсации напряжения V. При уменьшении /, движок 4 пойдет
в обратную сторону. Таким образом, всякому значению /« соответствует определенное положение движка 4. Очевидно, что при изменении величин сопротивлений г , г и г положение движка 4, соответствующее данному значению /я, будет меняться. Именно:
1.При увеличении г путем перемещения движка 2 вправо движок 4 должен переместиться влево.
2.При перемещении движка 3 вправо движок 4 также перемещается вправо.
3.Перемещение движка 5 влево вызовет перемещение и движка 4 влево,
4.Увеличение г перемещением движка б вверх вызовет перемещение движка 4 вправо.
Таким образом, изменение сопротивлений г , г и г влияет на величину перемещения движка 4 при изменении /я на определенную величину. Так как движок 4 связан с движком 7, то это приводит к тому, что:
1.Изменение тока якоря /я влечет за собой изменение сопротивления в цепи возбуждения, т. е. изменяет /«.
2.Степень изменения /в при изменении /я зависит от относительных величин сопротивлений г , г и г. Поэтому, меняя г , г и г, можно по желанию менять вид характеристики, по которой работает двигатель.
Путем элементарных математических расчетов можно показать, что предлагаемая схема делает возможной работу шунтового двигателя на любой из бесконечного количества характеристик различного вида. Так, если обозначить сопротивление обмотки возбуждения двигателя D через Гш и через а-отнощение R к r(R аг), то при
Гм - аг О
двигатель будет работать по чисто сериесной характеристике
/в А/я.,
где /е - сила тока возбуждения двигателя, а Л-коэфициент, зависящий от г, меняя которое можно получить различные сериесные характеристики.