Электрическая тяга на постоянном токе при помощи компаундных двигателей за последнее время в силу целого ряда преимуществ получила довольно широкое применение, особенно в трамвае и троллейбусе. Однако, применяемые системы контакторного управления являются ручными, что объясняется чрезмерной сложностью автоматической системы управления с индивидуальными контакторами в применении к компаундным моторам.
Настоящим предлагается групповая система управления, при помощи которой можно получить автоматическое ускорение и замедление экипажа, оборудованного одним или несколькими компаундными двигателями. Такая система не сложнее применяемых до сих пор контакторных схем с ручным управлением. Автоматическое управление дает возможность применить компаундные двигатели, кроме городского транспорта, также для метрополитена и пригородных железных дорог в тех случаях, когда частые остановки делают такое применение выгодным.
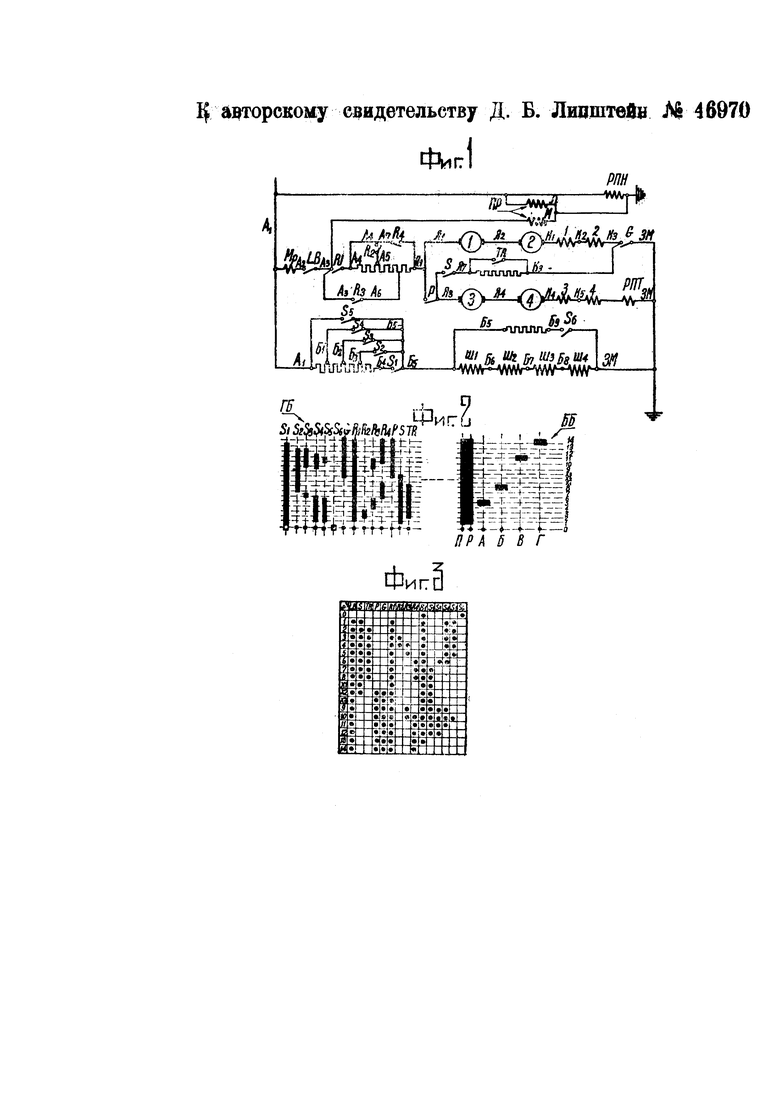
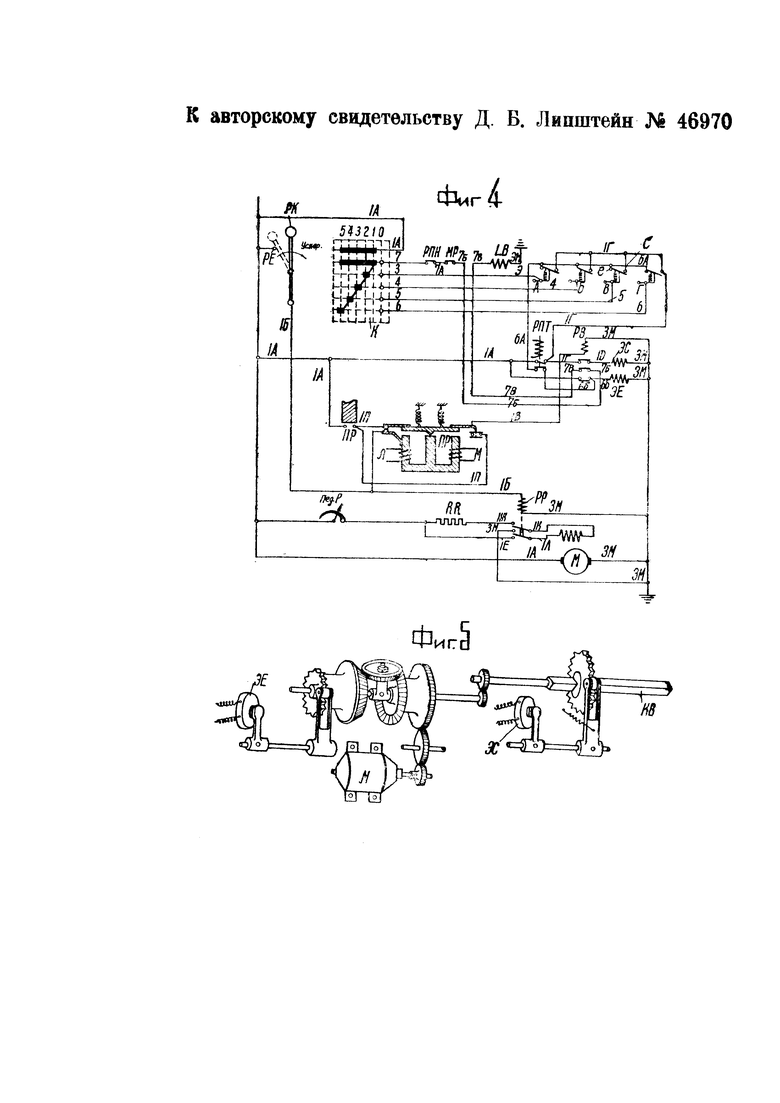
На чертеже фиг. 1 изображает схему обычного соединения компаундных тяговых двигателей (для ясности некоторые детали, например, реверсоры, в схеме опущены); фиг. 2 - развертку главного группового контроллера, служащего для управления контакторами схемы по фиг. 1; фиг. 3 - таблицу включений контакторов в схеме по фиг. 1; фиг. 4 - схему устройства для управления сервомотором и стопорным электромагнитом главного контроллера по фиг. 2; фиг. 5 - механическую часть привода главного контроллера по фиг. 2.
На чертеже обозначены: 1-4 якоря тяговых двигателей и их сериесные катушки, Ш1-Ш4 - шунтовые катушки их, MP - максимальное реле, РПН - реле повышения напряжения, LB - линейный контактор, R1-R4 - контакторы сопротивления в цепи якоря, S1-S6 - контакторы в шунтовой цепи, С, R, S, TR - контакторы для перехода с последовательного соединения групп двигателей на параллельное, РПТ - реле повышения тока, АВ - реле выбега, ПР - поляризованное реле, Л и М - его катушки, М - сервомотор для привода главного контроллера, RR - сопротивление в цепи возбуждения сервомотора, Р - педальный реостат в той же цепи, РР - реверсивное реле, K - контроллер для управления цепью стопорных электромагнитов, PK - рукоятка этого контроллера, ЭС - стопорный электромагнит для перевода главного контроллера на положение "стоп", ЭЕ - стопорный электромагнит для перевода этого контроллера на положение "езда", А, Б, В, Г - контакторы в цепи электромагнитов, управляемые кулачками блокировочного барабана ББ главного группового контроллера (фиг. 2), П, Р - контактные пальцы, управляемые барабаном ББ, ЗМ - провод, соединяющий цепь с землею; провода в цепи двигателей имеют двойные обозначения, состоящие из буквы и цифры; провода в цепи управления - обозначения, состоящие из цифры, и буквы.
В предлагаемом устройстве контакторы как силовой, так и шунтовой цепи, за исключением линейного контактора LB, управляются кулачками, посаженными на вал. Кулачковый вал КВ приводится в движение каким-нибудь сервомотором, например, электрическим или пневматическим.
Кулачковый вал КВ, вращаясь вперед, ускоряет вагон, а вращаясь назад, замедляет его, как это обычно делается в схемах с компаундными двигателями. Кроме главных кулачков, управляющих контакторами схемы по фиг. 1 и образующих барабан ГБ (фиг. 2), на валу имеется еще другой блокировочный барабан ББ, приводящий в действие контакторы или пальцы управления схемы (фиг. 2).
Электрический (в принципе возможен и любой другой) сервомотор М присоединяется к цепи управления через провод IA и выключатель управления, на схеме фиг. 4 не показанный. Передача от сервомотора к кулачковому валу устроена так, что вал приводится в движение лишь при возбуждении электромагнита ЭЕ защелки "езда" и невозбужденном электромагните ЭС "стоп". Наоборот, при возбужденном электромагните ЭС "стоп" и невозбужденном ЭЕ "езда" кулачковый вал КВ останавливается, хотя сервомотор и продолжает вращаться. Такой общеизвестный механизм показан на фиг 5. Понятно, что привод может быть выполнен конструктивно и иначе, причем, в частности, возможны и методы остановки кулачкового вала путем воздействия только на один электромагнит.
Управление поездом, его ускорение и замедление осуществляется контроллером К. При переводе ручки РК с нулевого положения на первое включается катушка возбуждения линейного контактора LB и поезд начинает двигаться на маневровом положении.
Дальнейшее ускорение поезда происходит передвижением ручки контроллера до какой-нибудь следующей позиции. Для примера рассмотрим постановку контроллера на четвертое положение. Провод 5 при этом возбудится. Этот провод питает блокировочный контактор В, один из числа контакторов (А, Б, В, Г), управляемых барабаном ББ (фиг. 2).
Блокировочный контактор устроен так, что нормально, если кулачковая шайба его не включила, палец В электрически соединен с зажимом е этого контактора и не соединен с c. Таким образом, при переводе ручки с первого положения на четвертое электромагнит ЭЕ "езда" возбудится через провод 5 и 6а, а электромагнит ЭС "стоп" останется невозбужденным, так как реле РПТ обычно выключено (о всех реле см. ниже). Поэтому кулачковый вал начнет вращаться, включать и выключать соответствующие контакторы (см. таблицу включений) и ускорять поезд. Для эксплоатации вагонов, работающих в условиях обычного пуска при постоянных условиях, например, на площадке, все управление может происходить автоматически под влиянием выдержки времени, которая получается из-за определенной скорости сервомотора М. Последний должен иметь явно выраженную шунтовую характеристику. Степень ускорения может быть при таком пуске регулирована реостатом Р в цепи возбуждения сервомотора М. Этот реостат может управляться педалью. Для защиты от чрезмерно больших токов, могущих возникнуть при пуске, например, заторможенного состава или при пуске на большом подъеме имеется реле РПТ. Под влиянием чрезмерного тока в сериесной катушке этого реле (фиг. 1) его блокировочные контакты выключат электромагнит ЭЕ "езда", одновременно включив электромагнит ЭС "стоп", чем останавливается дальнейшее вращение группового контроллера.
Автоматизация пуска, понятно, возможна и не под влиянием выдержки времени, а посредством реле ускорения, аналогичного по принципу реле РПТ. Такое реле останавливает продвижение группового контроллера под действием пиковой величины силы тока при пуске и допускает дальнейшее продвижение вала при падении силы тока. Принцип работы такого реле ускорения общеизвестен.
Групповой контроллер будет вращаться до тех пор, пока блокировочный контактор В не замкнется своим кулачком, т.е. до одиннадцатой ступени на принятом примере. При замыкании контактора В цепь электромагнита ЭЕ "езда" будет разорвана в контакте е, а контакт с контактора В замкнет цепь электромагнита ЭС "стоп". Групповой контроллер таким образом остановится на одиннадцатой позиции (фиг. 1 и 3), отвечающей четвертому положению контроллера К. Таким образом, можно достигнуть любого ездового положения главного контроллера.
Как известно, для того, чтобы получить рекуперативное торможение с компаундными двигателями; нужно кулачковый вал К привести во вращение в обратном направлении, чем при ускорении. Таким обратным ходом получается усиление поля тяговых двигателей и их переключение, вследствие чего двигатели работают генераторами, тормозящими поезд.
Обратное вращение кулачкового вала достигается при помощи реверсивного реле РР (фиг. 4). Это реле возбуждается контактом Ре, расположенными на ручке контроллера. Контакт Ре замыкается, как только ручка контроллера стронется на маленький угол (2-3°), который является углом холостого хода при движении ручки назад. Другими словами, до того, как контроллер будет сдвинут с какого-то положения на меньшее, например, с четвертого на третье, ручка при движении назад замкнет через контакт Ре цепь реле РР, которое изменит направление вращения сервомотора М, переключив его катушку возбуждения.
Если контроллер находится в положении, например, четвертом, а кулачковый вал в положений, отвечающем четвертому, т.е. в одиннадцатой позиции, то при продвижении ручки контроллера назад, например, на второе положение, кулачковый контроллер начнет вращаться в направлении, обратном направлению ускорения поезда, и последний будет тормозиться. Кулачковый вал остановится в позиции, отвечающей второму положению контроллера, т.е. на пятой, так как в этой точке через провод З и блокировочный контактор А возбудится электромагнит ЭС "стоп" с одновременным разрывом цепи электромагнита ЭЕ "езда".
Вращением ручки PR контроллера вперед и назад достигается ускорение либо замедление поезда. Если требуются различные скорости вращения кулачкового вала РВ при езде и торможении вследствие формы характеристик двигателей, то реверсивное реле может включать (или закорачивать) специальное сопротивление RR.
Защита тяговых двигателей осуществляется: 1) общеизвестным максимальным реле, воздействующим на линейный контактор, 2) реле повышенного напряжения РПН, которое при повышении напряжения свыше определенного, например, при поломке токоприемника, выключает линейный контактор (и включает не показанное в схеме сопротивление в шунтовую цепь двигателей, если этого требуют последние), 3) поляризованным реле ПР, которое имеет якорь, оттянутый пружинами так, что если обе катушки его не возбуждены, то все его контакты разомкнуты.
Если переводом ручки контроллера на нулевое положение выключить контактор LB (или если он выключится под влиянием реле РПН или MP), то в зависимости от условий (длительность выбега, профиль пути) катушка Л поляризованного реле перетянет катушку М или же наоборот. В первом случае возбудится катушка РР через провод IБ, а также электромагнит ЭЕ "езда" через реле выбега РВ; следовательно групповой контроллер повернется в направлении меньшей скорости (т.е. последовательного соединения двигателей при сильном шунтовом поле). Движение это будет продолжаться до тех пор, пока напряжение линии не станет равным или больше напряжения двигателей. В такой момент может включиться контакт LB, так как реле выбега РВ окажется выключенным. Во втором случае групповой контроллер будет двигаться вперед до такого же момента. Поляризованное реле таким образом защищает двигатели от эффекта длительного отсутствия напряжения в линии (если повысится напряжение холостого хода тяговых двигателей). Поляризованное реле из-за наличия контактных пальцев ПР на блокировочном барабане ББ группового контроллера не работает на первой его позиции и не мешает таким образом нормальному пуску.
Описанная ниже групповая система, понятно, может быть применена к любому количеству контакторных элементов и ездовых позиций.
В частности, вместо кулачковых контакторных элементов можно применить любое количество (в зависимости от ускорения) скользящих контактов.
В дополнение к рекуперативному торможению можно путем добавления соответствующей аппаратуры получить и несколько ступеней реостатного торможения, которое можно использовать для скоростей ниже предела рекуперации, а также в виде экстреннего тормоза. Такое дополнительное устройство не противоречит основной описанной выше схеме.
Устройство для автоматического управления компаундными тяговыми двигателями, в котором для переключений в цепи двигателей применены контакторы, управляемые кулачками главного контроллера, отличающееся тем, что, с целью дистанционного управления главным контроллерам с помощью постоянно включенного сервомотора М и стопорного электромагнита (или двух электромагнитов), примененный для управления электромагнитом контроллер снабжен, во-первых, контактами по числу ездовых положений главного контроллера, включенными в цепь управления электромагнитом последовательно с соответствующими блокировочными контактами А, Б, В, Г главного контроллера и, во-вторых, вспомогательным контактом, замыкаемым рукояткою контроллера при переводе последнего из ездового положения в нулевое и включенного в цепь реле РР, служащего для реверсирования в этом случае сервомотора М.
