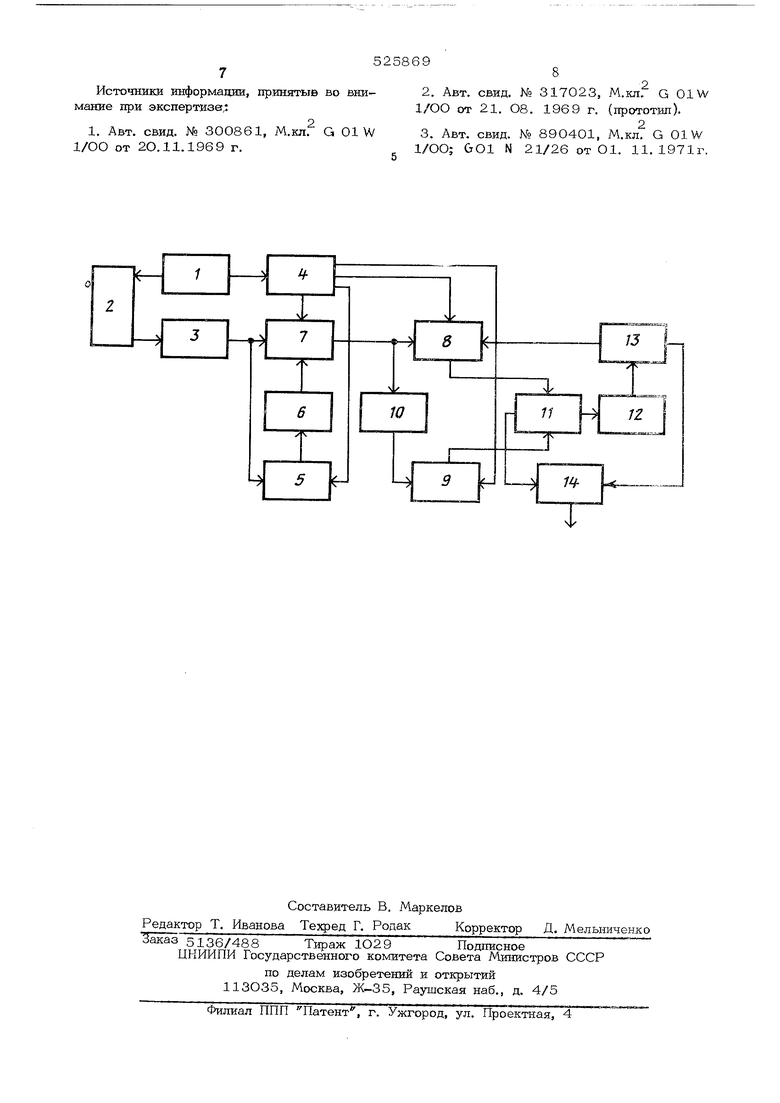
мосферой, отводят на фотоприемник 3 и используют ее для формирования опорного сигнала измерительного сигнала 3 и сигнала сравнения 3 . В оптическом тракте; включающем излучатель 1, фотопри емник 3 и объект измерения 2 , предусмот рена кo ffleнcaция сигнала на квадрат расстояния. Часть энергии разряда накопитель ного элемента в иачучателе 1 направляют в блок cшixpoнизaции 4 и используют ее для огфеделения времени запаздывания эхосигнала. С помощью интегратора 5 определяют величину опорного с.игнала как площад под огибающей эхо-сигнала на щтервале времени, равном удвоенной длительности светового иьшульса 2 Т , отсчитывая этот интервал в блоке 4 от момента начала излучения. Полученную таким образом величину в виде электрического сиг-нала направ Л5ПОТ через делитель напряжения 6 на один иа входов вычитающего устройства 7, другой вход которого подключают к выходу фотоприемника 3 после момента окончания излучения светового импульса. Сигнал с вы хода .вычитающего устройства 7 подают на интегратор 8 непосредственно, а на интегратор 9 - через нелинейный элемент 1О, например пол ттроводниковый диод. С помощью интегратора 8 и вычитающего устро ства 7 определяют разность площадей, одна из которых ограничена участком огибающей эхо-сигнала иа интервале времени i , отсчитанном от момента окончания излучения и нулевым тэовнем, а другая предста ляет собой площадь прамо тольника с основанием и высотой, равной уровню сигнала iJ - иоступающему на вход вычитающего устройства 7 от делителя 6, Определенную таким образом величтшу используют в качестве сигнала сравнения 3, С помощью интегратора 9 определяют площадь под участком огибающей эхо-сигнала, расположенным над уровнем 3 на интервале времени Т,, отсчитывая этот интервал после момента окончания излучения. Определенную таким образом величину использу ют в качестве измерительного с.игнала Э, Разность между измерительным сигналом и сигналом сравнегшя ,, полученную на выходе схемы сравнения 11, используют для управления блоком экстремального регулирования 12, который, в свою очередь, управляет блоком времени 13, на выходе которого, в зависимости от управляющего напряжения блока 12, формируется интервал времени i для управления работой интегратора 8. Величину, пропорциональную t , подают одновременно на схему запрета 14. которая подключает этот сигнал на выход устройства в случае, если уровень нала, поступающего на схему запрета схемы сравнения 11, равен нулю. Сиг, полученный на выходе схемы запрета , используют в качестве величины, пряпропорциональней значению метеорологикой дальности видимости на исследуемом стке трассы зондирования. Наличие блока экстремального регулироия в схеме устройства для определения зрачности по предлагаемому способу объястся следующим. Сигнал рассогласования в виде разности DC, можно представить следующим об:2Г , тп - i;,U5dx-j t J, г2Г а)ах т - опорный сигнал; Змдкс - измерительный сигнал t. If. - сигнал сравнения; ax-i3 , 1 гЧ Гг С X) огибающая с.игнала на интервале времени от момента начала излучения; СЧ) - огибаюшая сигнала на интервале времени t от момента окончания излучеаи; - постоянный коэффициент, меньше I; - интервал времени пропорциональный толщине исследуемого участка трассы зондирования 6 -у- t, С - скорость света; - длительность светового импульса. ри этом ля И1 шульса света достаточно болыиой ельности, когаа обеспечивается услоС о(.Г 1, выражения для участков ающей сигнала обратного рассеяния при вии, что в оптическом тракте устройпредусмотрена компенсация на квадрасстояния; будут иметь вид монотонарастающей ( для i ) и монотонно ающей ( для i. кривой . -CctCt-C) Ч амляс
Используя полученное ранее выражение для .с учитывая условие Csi tr можно записать
i i i 3
1МАКС2. ЛЛАКСМАКСАЛАКС
Суммируя измерительный сигнал и сигнал сравнения с функцией
fi,Cx)dx,
о
предстал5пот сигнал рассогласования в виде разности функций
т1 l 3 Iri.
.3dx
где
- функция
оценки сигнала по параметру t ;
Is Т
ог функция,
пропорциональная среднему значению сигнг: ла от исследуемого участка трассы зондирования.
Измерительный сигнал представляют в виде г-и
.,
«АЦС
гдet - искомое значе ше параметра i .
С учетом этого пишут выражение для сигнала рассогласования имея в виду, что -t .
r+t
С )i(x)dx + Ji
Cx)dx+ i,Cx)dx-j3
(ЛАКС
д.е
i
MAKclT где L -2 - значение. показателя ослаб ления на участке трассы Д Следовательно, сигнал рассогласования в виде функции разности сигналов 3, - 3 имеет экстремум при равенстве парамет- С ИСКОМОМУ значению t ров С искомому значению t , для кото рого справедливо равенство i expc-c Zt). Вьшолняют оценку методической погреш ности измерений. Из выражения j eiip( следует , что§ (J-i, где знаком c обозначены относительные погрешности определения соответствующих элементов. Очевидно, что погрешность как погрешность делителя напряжения может быть достаточно малой. Поэтому можно считать, что ai --с( - I.Из вьфажешш для вания следуетz
С д 6
откуда Д 3 ot- / 1 -сГЛ,
1J п ль- . А
J MAKC- e
потому что согласно выражению для сигнала 3
:)L
I-
момент отсчета .
Раскрывая еще раз выражение для 6 пользуясь зависимостью
3 expC-Co :t),
получают
и
ti-i)o«.
(
..
В частном случае при j е имеют
(5 0 -/ce-i)-(,
,- где - основаш1е натуральных логарифмов.
Из последнего выражения видно, что погрешность измерения по предлагаемому способу определяется не мгновенным, а
средненным на интервале времени 4 С
значеш1ем 3
от исследуемого
Этим участка трассы зондирования определяется высокая помехоустойчивость предлагаемого способа измерения. Достоинством способа является также линейная связь выходной величины t с измеряемым параметром - метеорологической дальностью видимости.
40
Формула изобретения Способ определения прозрачности атмосферы путем облучения исследуемой трассы импульсным источником света с квазинепре- рывным режимом излучения, пространственно - временной селекции эхо-сигналов и их накопления, отличающийся тем, что, с целью уменьшения требуемой мощности излучения, получаемые в процессе накопления суммарные значения эхо-с.игналов от рассеивающих слоев, накапливают дважды до и после момента окончания излучения светового импульса и по получен- ному таким образом .интегральному значению эхо-сигналов, накопленных за время, равное длительности светового импульса от каждого из рассеивающих слоев, составляющих исследуемый отрезок трассы зондирования, судят об измеряемом параметре.
Источники информации, принятые во внимание при экспертизе,:
1. Авт. свид, № 300861, М.кл. G 01 W 1/ОО от 2О.11.1969 г.
2.Авт. свид. № 317023, М.кл. G 01W 1/ОО от 21. ОБ. 1969 г. (прототип).
2
3.Авт. свид. № 89О401, М.кл. G 01W 1/ОО; GO1 N 21/26 от 01. 11.1971г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения оптическихХАРАКТЕРиСТиК АТМОСфЕРы | 1979 |
|
SU838625A1 |
| Оптическое устройство зондирования атмосферы | 1978 |
|
SU731409A1 |
| Устройство для определения оптических характеристик атмосферы | 1982 |
|
SU1103083A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОЗРАЧНОСТИ АТМОСФЕРЫ | 2008 |
|
RU2395106C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО РАСПРЕДЕЛЕНИЯ КОНЦЕНТРАЦИИ ГАЗА | 2000 |
|
RU2170922C1 |
| Устройство для ультразвуковых исследований | 1979 |
|
SU786993A1 |
| Способ определения коэффициентов отражения границ биологической ткани и устройство для его осуществления | 1986 |
|
SU1397026A1 |
| Способ определения оптических характеристик рассеивающих сред | 1981 |
|
SU966639A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОЗРАЧНОСТИ АТМОСФЕРЫ | 2009 |
|
RU2439626C2 |
| СПОСОБ ОПТИЧЕСКОГО ЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2010 |
|
RU2441261C1 |
