1
Изобретение относится к медицинской технике, а именно к диагностической аппаратуре.
Известно устройство для ультразвуковых исследований, содержащее приемно-передсиощий блок, блоки электронного сканирования и стробирования блок nporpciMM, блок памяти, ультразвуковые преобразователи, механизм перемещения преобразователей вокруг оси исследуемого тела, датчик положения преобразователей и контактноакустическую камеру 1.
Однако зто устройство не обеспечивает визуальный контроль выполнения акта репозиции отломков кости конечности, что затрудняет проведение остеосинтеза.
Целью изобретения является обеспечение визуёшьного контроля выполнения акта репозиции отломков кости конечности.
Поставленная цель достигается тем, что в устройстве контактно-акустическая камера выполнена в виде цилиндрической контактно-жидкостной подушки, предназначенной для размещения на исследуемом участке конечности, мембраны, расположенной поверх подушки по всей площади образующей
цилиндра, двух полуколец и закрепленных на них ультразвуковых преобразователей, соединенных электрически с блоком электронного сканирования, а механически с датчиком положения преобразователей, причем одна пара полуколец жестко соединена с дополнительно установленным кронштейном, предназначенным для
10 закрепления на горизонтальном мосту тороко-абдукционной шины.
Кроме того, ультразвуковые преобразователи выполнены в виде линейной решетки преобразователей, имеющих искривление излучающей поверхности по радиусу, равному радиусу цилиндрической мембраны.
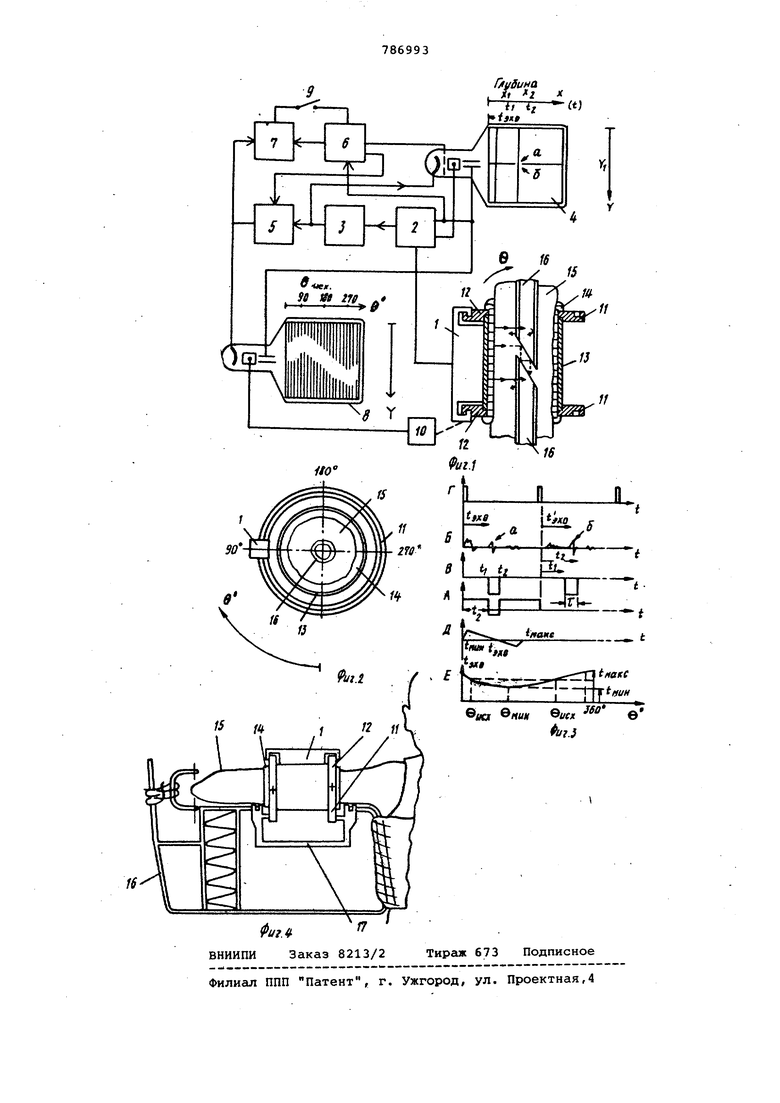
На фиг. 1 изображена структурная
20 схема устройства для ультразвуковых исследований; на фиг. 2 - электроакустическая часть устройства визуализации, вертикальная проекция; на фиг. 3 - временные диагрс1ммы работы устройства; на фиг. 4 - схема установки электроакустической части устройства визуализации на торокоабдукционную шину.
Устройство содержит линейную реЗЬ шетку 1 электроакустических ультразвуковых преобразователей, соединенную с последовательно включенными блоком 2 электронного сканирования и прйемно-передающим блоком 3, выход которого соединен с катодом первой электроннолучевой, трубки 4 и с входом блока 5 временного стробирования. Один иэ входов блока 5 подключен к выходу блока 6 программ, а выход блока 5 к первому входу дискриминатора импулсов и к катоду второй электроннолучевой трубки 8 с электронной памятью блока памяти. Второй вход дискриминатора импульсов через блок 6 программ соединен с управляющей сеткой первой электроннолучевой трубки 4 и с входом управления блока 5 временного стробирования, а выход через переключатель 9 с входом автоматического управлвния блока 6 программ. Вход синхронизации блока б подключен к выходу напряжения первой развертки блока 2 электронного сканирования, к пластинкам веотикального отклонения электроннолучевой трубки 8 с электронной памятью и электроннолучевой трубки 4, пластинки горизонтального отклонения которой соединены с выходом напряжения второй развертки блока 2 электронного сканирования. Датчик 10 положения преобразователей электрически соединен с пластинами горизонтального отклонения электроннолучевой трубки. 8 и механически с решеткой 1 пьезоэлектрических преобразователей, которая подвижно фиксируется на направляняцих полукольцах 11, 12, между; которыми устанавливается акустически прозрачная мембрана 13, с внутренней стороны которой уложена цилиндрическая контактно-жидкостная подушка 14, контактирующая с исследуемым объектом 15. Линейная решетка
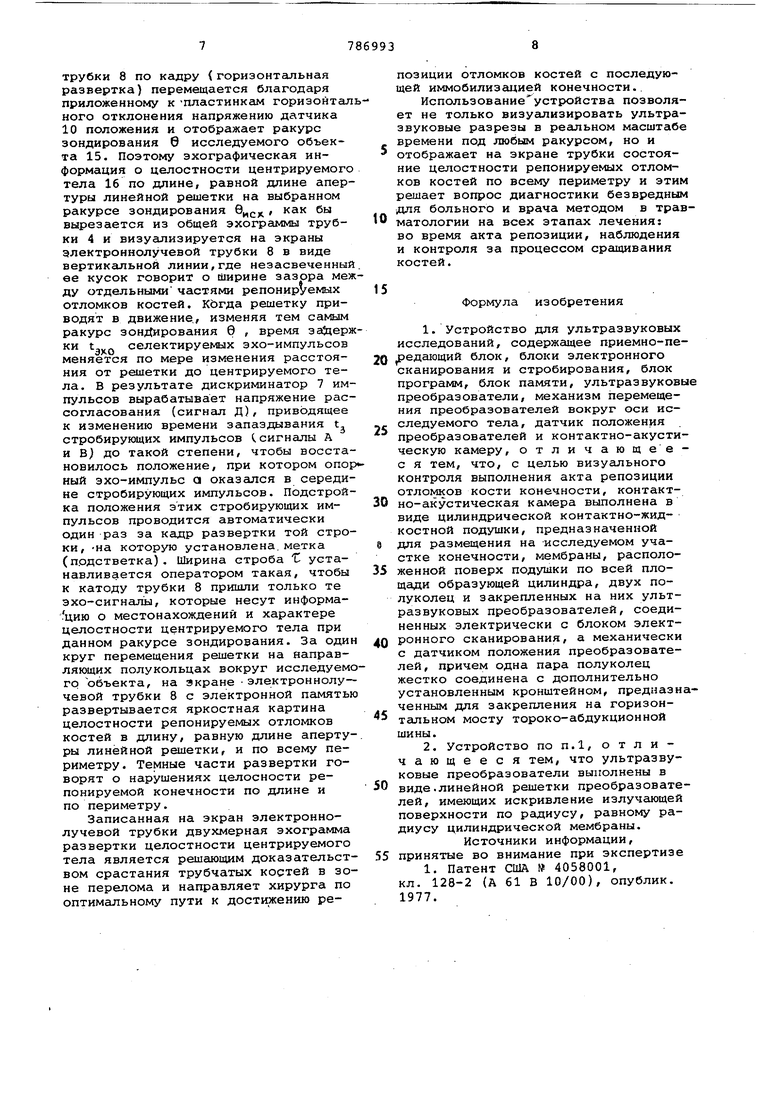
Iпреобразователей имеет искривление излучающей поверхности по радиусу, равному радиусу цилиндрической мембраны 13. Во время репозиции отломков трубчатой кости верхней конечности (плеча) на тороко-абдукционной шине 16 (фиг.4) части ее горизонтального моста заменяется кронштейном 17, служащим не только звеном жесткости видоизмененного моста шины, но и предназначенным для временного прикрепления электроакустической части устройства визуализации так, чтобы решетка 1 электроакустических преобразователей могла свободно обойти плечо. К кронштейну 17 крепятся нижние полукольца .11.
Устройство работает следующим образом.
На переменное место плеча (исследуемый объект 15) накладывают контактно-жидкостную подушку 14, сверху ее мембрану (в виде свернутого листа которая ложится в нижние полукольца
IIи сверху надевают верхние полукольца 12 с закрепленной на них решеткой 1 электроакустических преобразователей. Дёшее подушку 14 наполняют прозрачной для ультразвука жидкостью/ благодаря создавшемуся при этом давлению на поверхность исследуемого объекта 15 с одной стороны, и акустически прозрачной мембраны 13 с другой стороны, обеспечивается акустический контакт исследуемого объекта с решеткой 1 преобразователей . Решетка в свою очередь имеет искривление излучающей поверхности одинаковое и криволинейностью установленной на направляющие полукольца мембраны 13.
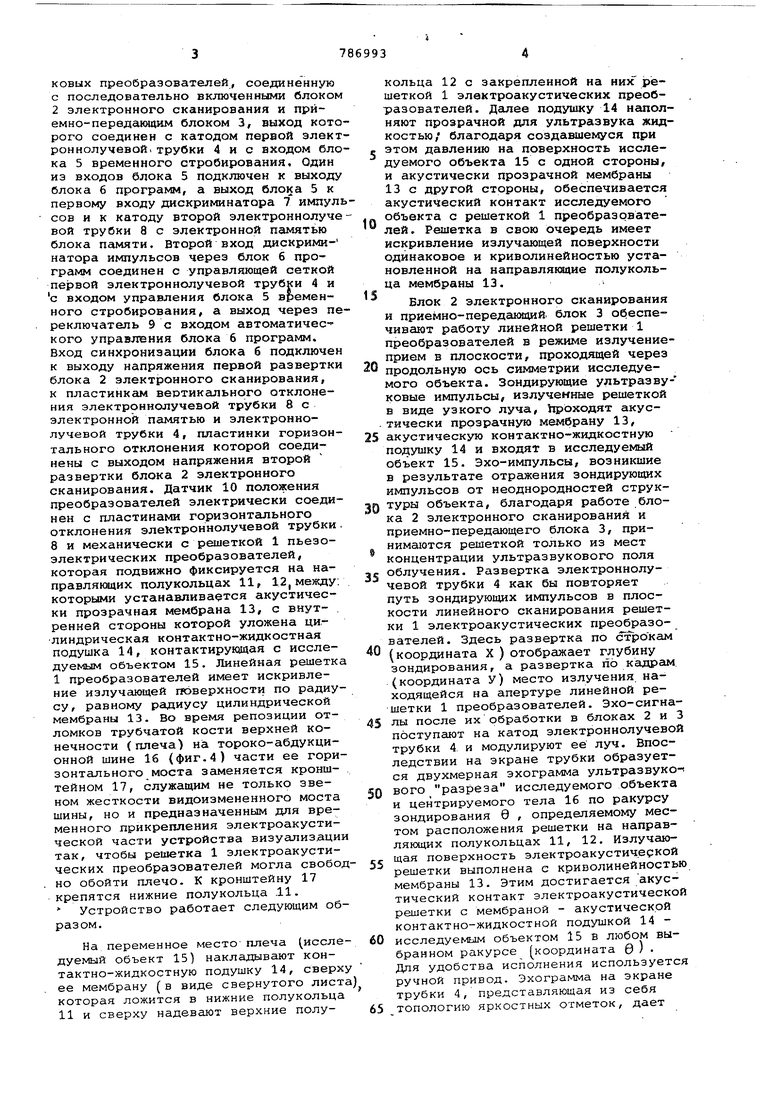
Блок 2 электронного сканирования и приемно-передающий, блок 3 обеспечивают работу линейной решетки 1 преобразователей в режиме излучениеприем в плоскости, проходящей через продольную ось симметрии исследуемого объекта. Зондирующие удьтразвуковые импульсы, излученные решеткой в виде узкого луча, проходят акустически прозрачную мембрану 13, акустическую контактно-жидкостную подушку 14 и входят в исследуемый объект 15. Эхо-импульсы, возникшие в результате отражения зондирующих импульсов от неоднородностей структуры объекта, благодаря работе блока 2 электронного сканирования и приемно-передающего блока 3, принимаются решеткой только из мест концентрации ультразвукового поля облучения. Развертка электроннолучевой трубки 4 как бы повторяет путь зондирующих импульсов в плоскости линейного сканирования решетки 1 электроакустических преобразователей. Здесь развертка по строкам (координата X ) отображает глубину зондирования, а развертка по кадрам (координата У) место излучения находящейся на апертуре линейной решетки 1 преобразователей. Эхо-сигналы после их обработки в блоках 2 и поступают на катод электроннолучево трубки 4 и модулируют ее луч. Впоследствии на экране трубки образуется двухмерная эхограмма ультразвуко вого разреза исследуемого объекта и центрируемого тела 16 по ракурсу зондирования 9 , определяемому местом расположения решетки на направляющих полукольцах 11, 12. Излучающая поверхность электроакустической решетки выполнена с криволинейность мембраны 13. Этим достигается акустический контакт электроакустическо решетки с мембраной - акустической контактно-жидкостной подушкой 14 исследуемым объектом 15 в любом выбранном ракурсе координата 6 ) Для удобства исполнения используетс ручной привод. Эхограмма на экране трубки 4, представляющая из себя топологию яркостных отметок, дает врачу представление о дислокации и характере перелома репонируемой конечности, помогает локализировать костные отломки. После того, как врач добивается приемлемого осевого псхпожения отломков трубчатой кости пациента, используя при этом ручной метод и растяжение на абдукционной шике 16 (фиг. 4), наступает эаверШсЬощий этап репозиции-сближение частей отломков. На этом этапе работы проводится ультразвуковой контроль за так называемой целостностью кости по его периметру. Эту информацию имеют только те эхо-импульсы, которые возникают в результате отражения зондирующих ульразвуковых импуль сов от раздела иccлeдye.ый объект 15 (мышечная система плеча) - внешняя поверхность трубчатой кости (центрируемое тело 16). Часть устройства визуализации, решающая задачу селекции и индикации эхо-импульсов, отобр жающих целостность костей, работает следующим образом. Импульс напряжения, выработанный блоком б программ задает режим работы блоку 5 стробирования. В результате чего блок 5 проходит только те эхо-сигналы, которые попадают в интервал времени ц-1, отсчитывая от очередного зондирующего импульса. Ширина этих электронных ворот Т t.j-t и место их положения по строкам растра элект роннолучевой трубки 4 устанавливаетс вручную врачом, исходя из конкретных условий эксперимента. Визуальный контроль за действительным местом интервала селекции эхо-сигнгшов осуществляется благодаря дополнительной подсветке одной строки У (фиг.1), подачей на управляющую сетку трубки 4 импульса напряжений (сигнал А на фиг.З). Темный зазор глубины ,, подсвеченной строки говорит о том, что эхо-импульс а (сигнал Б на фиг. находящийся во временном интервале , выбран как опорный для осуществления слежения электронных вор с целью селекции блоком 5 стробирования эхо-сигналов, которые приходя из глубинного слоя (стробирую щие импульсы - сигнал в на фиг.З) для выявления целостности репонируе мых костей (дентрируе1лого тела 16) по периметру. В общем случае центрируемое тело 16 не будет находиться в геометриче ком центре электроакустической круговой системы зондирования. А это означает, что расстояние между излучающей плоскостью апертуры линейной решетки 1 преобразователей и пе ресекаемой ее ультразвуковым лучом ближайшей поверхности отломков костей, соответственно и запаздывание t селектированию подлежащих эхоимпульсов а сигнала Б фиг.З , буду меняться в зависимости от ракурса зондирования 8.. Вначгше оператором решетка 1 устанавливается под таким ракурсом в„, при котором эхо-импульс а , выбранный в качестве опорного, займет rto отношению к очередному моменту запуска зондирующего импульса (сигнал Г на фиг.З) в диапазоне полного круга механического сканирования решетки среднее положение. Это значит, что решетка должна быть установлена на направляющих полукольцах в таком месте, в котором будет выполняться условие - импульсный дискриминатор 7 настраивается так, чтобы его характеристика дискриминации ( сигнал Д на фиг.З) совпала с выбранным в качестве опорного эхо-импульсом а. И наконец, изменяя режим работы блока 6 программ, оператор добивается такого положения отрицательного перепада напряжения подсветки (сигнал Д) строки, также и стробирующих импульсов, по отношению к выбранным опорным эхо-импульсам а, чтобы последний оказался в середине этого перепада. На экране электроннолучевой трубки 4 это выразится картиной, где яркостная отметка эхо-импульса а будет находиться посредине незасвеченной части строки-метки. На этом заканчивается подготовка устройства визуализации к формированию развертки целостности центрируемого тела 16 на экране электроннолучевой трубки 8. Временный дискриминатор 7 предназначен для определения временно -о рассогласования между опорным эхо-импульсом а и импульсом электронных ворот (сигнал А) настроке-метке и преобразования его в сигнал рассогласования. Переключатель 9 переводится из нейтрального положения в рабочее, определяющее автоматическую селекцию эхо-сигналов, отраженных от поверхности центрируемого тела. Так как решетка поставлена по ракурсу .J , а дискриминатор 7 импульсов настроен на опорный эхоимпульс а / находящийся в середине электронных ворот (сигнал А), выходное напряжение рассогласования (сигнал Д) на выходе импульсного . риминатора при этом будет равно ну-. лю. Время запаздывания импульсов электронных ворот (сигнал в) будет равно . Это значит, что эхоимпульсы, пришедшие из глубинного слоя в плоскости сканирования линейной решетки, направляются в катод электроннолучевой трубки 8. Напряжением развертки строк (вертикальная развертка - координата У) трубки 8, служит тоже самое напряжение кадровой развертки (вертикальная развертка) трубки 4. Оно соответствует положению ультразвукового луча на апертуре линейной решетки 1 преобразователей. Луч электроннолучевой
трубки 8 по кадру (горизонтальная развертка) перемещается благодаря приложенному к -пластинкам горизонталного отклонения напряжению датчика 10 положения и отображает ракурс зондирования 0 исследуемого объекта 15. Поэтому эхографическая информация о целостности центрируемого тела 16 по длине, равной длине апертуры линейной решетки на выбранном ракурсе зондирования 6,сц как бы вырезается из общей эхограммы трубки 4 и визуализируется на экраны электроннолучевой трубки 8 в виде вертикальной линии,где незасвеченный ее кусок говорит о ширине зазора между отдельными частями репонируемых отломков костей. КЬгда решетку приводят в движение,, изменяя тем самым ракурс зондирования 6 , время за55ержки t Q селектируемых эхо-импульсов меняется по мере изменения расстояния от решетки до центрируемого тела. В результате дискриминатор 7 импульсов вырабатывает напряжение рассогласования (сигнал Д), приводящее к изменению времени запаздывания tj стробирующих импульсов (.сигналы А и В) до такой степени, чтобы восстановилось положение, при котором опорный эхо-импульс а оказался в середине стробирующих импульсов. Подстройка положения этих стробирующих импульсов проводится автоматически один раз за кадр развертки той строки, -на которую установлена.метка (п.одстветка) . Ширина строба Т устанавливается оператором такая, чтобы к катоду трубки 8 пришли только те эxo-cигнaJШ, которые несУТ информацию о местонахождений и характере целостности центрируемого тела при данном ракурсе зондирования. За один круг перемещения решетки на направляющих полукольцах вокруг исследуемого Ъбъекта, на экране электроннолучевой трубки 8 с электронной памятью развертывается яркостная картина целостности репонируемых отломков костей в длину, равную длине апертуры линейной решетки, и по всему периметру. Темные части развертки говорят о нарушениях целосности репонируемой конечности по длине и по периметру.
Записанная на экран электроннолучевой трубки двухмерная эхограмма развертки целостности центрируемого тела является решающим доказательством срастания трубчатых костей в зоне перелома и направляет хирурга по оптимальному пути к достижению репозиции отломков костей с последующей иммобилизацией конечности.
Использование° устройства позволяет не только визуализировать ультразвуковые разрезы в реальном масштабе - времени под любым ракурсом, но и отображает на экране трубки состояние целостности репонируемых отломков костей по всему периметру и этим решает вопрос диагностики безвредным для больного и врача методом в травматологии на всех этапах лечения: во время акта репозиции, наблюдения и контроля за процессом сращивания костей.
Формула изобретения
1.Устройство для ультразвуковых исследований, содержащее приемно-пе)едшощий блок, блоки электронного сканирования и стробирования, блок программ, блок памяти, ультразвуковые преобразователи, механизм перемещения преобразователей вокруг оси исследуемого тела, датчик положения преобразователей и контактно-акустическую камеру, отличающеес я тем, что, с целью визуального контроля выполнения акта репозиции отломков кости конечности, контактно-акустическая камера выполнена в виде цилиндрической контактно-жидкостной подушки, предназначенной для размещения на -исследуемом участке конечности, мембраны, расположенной поверх подушки по всей площади образующей цилиндра, двух полуколец и закрепленных на них ультразвуковых преобразователей, соединенных электрически с блоком электронного сканирования, а механически с датчиком положения преобразователей, причем одна пара полуколец жестко соединена с дополнительно установленным кронштейном, предназначенным для закрепления на горизонтальном мосту тороко-абдукционной шины.
2.Устройство ПОП.1, отличающееся тем, что ультразвуковые преобразователи выполнены в
виде.линейной решетки преобразователей, имеющих искривление излучающей поверхности по радиусу, равному радиусу цилиндрической мембраны.
Источники информации, принятые во внимание при экспертизе
1. Патент США № 4058001, кл. 128-2 (А 61 В 10/00), опублик. 1977.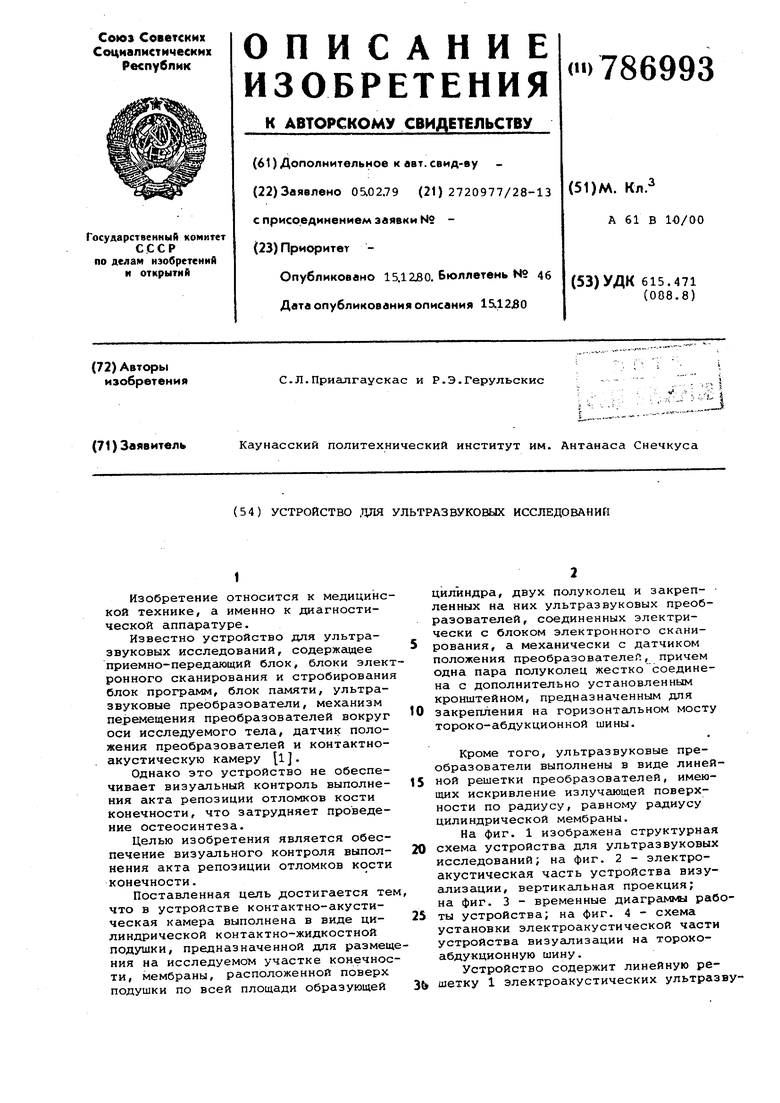

| название | год | авторы | номер документа |
|---|---|---|---|
| Ультразвуковое сканирующее устройство для исследования структуры полостей | 1981 |
|
SU959763A1 |
| Эхолокационное устройство | 1977 |
|
SU616583A1 |
| Устройство для ультразвукового исследования тканей тела | 1979 |
|
SU921524A1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО ОБНАРУЖЕНИЯ МИКРОТРЕЩИН НА ПОВЕРХНОСТИ КАТАНИЯ ГОЛОВКИ РЕЛЬСА | 2017 |
|
RU2652511C1 |
| Способ ультразвукового контроля изделий | 2016 |
|
RU2622459C1 |
| Способ ультразвукового томографического контроля изделий | 1990 |
|
SU1817019A1 |
| Способ высокоскоростной ультразвуковой дефектоскопии длинномерных объектов | 2021 |
|
RU2756933C1 |
| СКВАЖИННЫЙ ГИДРОЛОКАТОР | 1971 |
|
SU317782A1 |
| Устройство для наблюдения объектов в оптически непрозрачных средах | 1983 |
|
SU1102055A1 |
| АКУСТИЧЕСКИЙ БЛОК ДЛЯ НЕРАЗРУШАЮЩЕГО УЛЬТРАЗВУКОВОГО ЛОКАЛЬНОГО КОНТРОЛЯ КАЧЕСТВА ТРУБ | 2016 |
|
RU2623821C1 |