(54) СЛЕДЯЩАЯ СИСТЕМА
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1973 |
|
SU463096A1 |
| Система связи | 1982 |
|
SU1030979A1 |
| УСТРОЙСТВО для СЛЕДЯЩЕГО ПРЕОБРАЗОВАНИЯ ГРАФИЧЕСКОЙ ИНФОРМАЦИИ | 1972 |
|
SU359676A1 |
| Металлоискатель | 1982 |
|
SU1071988A1 |
| Устройство для бесконтатного измерения удельной электрической проводимости и магнитной проницаемости электропроводящих материалов | 1984 |
|
SU1180777A1 |
| ИМПУЛЬСНЫЙ ВИХРЕТОКОВЫЙ ИЗМЕРИТЕЛЬ | 1972 |
|
SU323640A1 |
| Устройство для измерения малых угловых скоростей | 1976 |
|
SU591767A1 |
| Автогенераторный многопараметрический измеритель | 1983 |
|
SU1132259A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ТОЛЩИНЫ ЭЛЕКТРОПРОВОДНЫХ ИЗДЕЛИЙ | 1970 |
|
SU278130A1 |
| Устройство для измерения удельной электрической проводимости | 1982 |
|
SU1472845A1 |
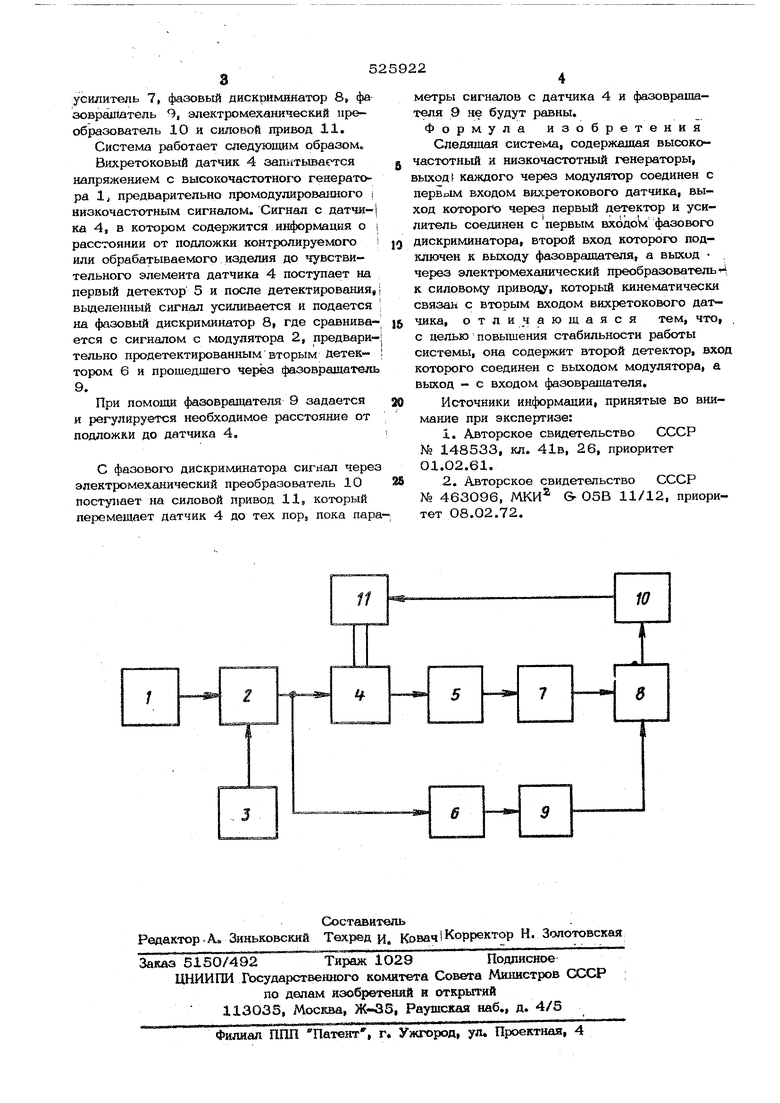
Изобрете1ше относится к активному контролю и бесконтактному измерению размеров и. MOK&s быть использовано в системах а втоматического; регулирования в приборо|Строении, а также в машиностроении. Известна бесконтактная следящая система, в которой в Качестве чувствительного (элемента используется вихретоковый датчик ll. |. Известна также следящая система, со ; держащая высокочастотный и 1низкочастот|ньа генераторы, выходы которых соединены 1с соотеетствую1о1ими входами модулятора, I выход которого соединен с первым входом Iвихретокового датчика, выход которого че|рез детектор и усилитель соединен с пер|вым входом фазового дискриминатора, вход которюго соединен с выходом фа- ; зовращателя, а выход через электромехани|Ческий преобразователь и силовой привод соединен с вторым входом вихретокового I датчика, выход низкочастотного гене ратора подключен к входу фазовращателя, 2J . Однако эта система характевизуется не стабильностью работы измер1 гельной. части за счет дрейфа величины сигналов, что приводит к снижению работы системы. Целью зоёрётения является повьииение рстабильности работы системы. t Для этого в системе, содержаш ей со кочастотный и низкочастотный генераторы, выходы которых через модулятор соединены с первым входом вихретокового датчика, выход которого через первый детектор и усилитель соединен с первым входом фазового дискримннатора,-второй вход которого подключен, к выходу фазовращателя, а выход - через электромеханический преобразователь к силовому приводу, котфый кинематически связан с вторым входом вихр токового датчика, уставювлен второй детектор, вход которого соединен с выходом мо дулятора а выход - с входом фааоврашате ля. j На чертеже приведена структурная эпс- т ическая схема следящей системы. Следящая система содержит выбокочао / тотный генератор 1, модулятор 2, низкочастотный генератор 3, вихретоковый датчик 4, первый и второй детекторы 5 и б. усилитель 7, фазовый дискриминатор 8, фааоврашатель 9, электромеханический преобразователь 10 и силовой привод 11, Система работает следующим образом. Вихретоковый датчик 4 запитывается напряжением с высокочастотного генератора Ij предварительно промодулированного i низкочастотным сигналом. Сигнал с датчика 4, в котором содержится информация о расстоянии от подложки контролируемого или обрабатываемого изделия до чувствительного элемента датчика 4 поступает на первый детектор 5 и после детектирования, выделенный сигнал усиливается и подается на фазовый дискриминатор 8, где сравнивается с сигналом с модулятора 2, предварительно продетектированным вторым Детектором 6 и прошедшего через фазовращатель 9. При помощи фазовращателя 9 задается и регулируется необходимое расстояние от подложки до датчика 4. С фазового дискриминатора сигнал через электромеханический преобразователь 10 поступает на силовой привод 11 j который перемещает датчик 4 до тех пор, пока пара метры сигналов с датчика 4 и фазовращателя 9 не будут равны. Формула изобретения Следящая система, содержащая высокочастотный и низкочастотный генераторы, выход каждого через модулятор соединен с nepBoiM входом вихретокового датчика, выход которогЧз через первый детектор и усилитель соединен с первым входои фазового дискриминатора, второй вход которого подключен к выходу фазовращателя, а выход через электромеханический преобразователь 4 к силовому приво;здг, который кинематически связан с вторым входом вихретокового дат- чика, отличающаяся тем, что, с целью повышения стабильности работы системы, она содержит второй детектор, вход которого соединен с выходом модулятора, а выход - с входом фазовращателя. Источники информации, принятые во внимание при экспертизе: 1. Авторское свидетельство СССР № 148533, кп. 41в, 26, приоритет О1.02.61. 2. Авторское свидетельство СССР № 463096, МКИ & 05В 11/12, приоритет О8.02.72.
