Изобретение относится к классу систем, иснользуемых для автоматического считывания разнообразной графической информации, в частности, в качестве датчиков контурного описания читающих и распознающих автоматов. Устройства для следящего преобразования обычно работают в двух режимах - поиск и отслеживание обнаруженных контуров - и содержат в составе фотоэлектрический преобразователь, генератор контурной развертки и генератор поиска. В большинстве устройств для следящего преобразования информацию о направлении и расположении отслеживаемого участка границы получают при периодическом поисковом (сканирующем) движении разлагающего элемента по окружности малого диаметра (формируют т. н. сканирующий элемент системы). В фотоэлектрическом преобразователе формируется сигнал, отсчеты которого пропорциональны яркостям точек изображения, расположенных по траектории движения разлагающего элемента. В генераторе контурной развертки, включенном последовательно с фотоэлектрическим преобразователем, формируются сигналы управления положением сканирующего элемента - сигналы продвижения вдоль контура (в системе продвижения) и сигналы фиксации сканирующего элемента в определенном положении относительно контура (в системе автоматической фиксации). Генератор поиска осуществляет предварительный поиск изображений объектов в поле зрения системы. Известны системы контурного разложения (преобразования), отличающиеся назначением, типом фотоэлектрического преобразователя, формой траектории сканирования, способами формирования сигналов управления и т. д. Значительную группу представляют устройства следящего разложения - датчики углового или координатного описаний исследуемых изображений. В качестве выходных сигналов в таких системах используют либо сигнал продвижения на несущей (на частоте сканирования), либо непосредственно координатные составляющие, пропорциональные отклонению сканирующего элемента в системе координат поля зрения. Фаза сигнала продвижения на несущей в каждый момент времени однозначно соответствует направлению отслеживаемого участка кривой. Известно также устройство следящего преобразования с формированием сигналов управления из первой гармонической и низкочастотных составляющих видеосигнала фотоэлектрического преобразователя. К низкочастотным составляющим отнесены составляющие видеосигнала, меньшие частоты несущей, к первой гармонической - составляющие, сосредоточенные у частоты сканирования.
В этом устройстве так же, как и в других известных устройствах, разложение изображений осуществляется с постоянной, мало зависящей от кривизны отслеживаемых контуров скоростью. Однако, вследствие статистической избыточности отслеживаемых изображений, наличия протяженных статистических связей в отслеживаемых контурах (что характерно для большинства классов изображений - буквы, геометрические фигуры, чертежи и т. д.) устройства следящего преобразования при таком способе разложения нельзя считать согласованными с последующими устройствами обработки сигнала. Это не позволяет достичь предельных для данных систем значений параметров по световой (контрастной) чувстительности, быстродействию, помехоустойчивости, точности формирования углового или координатного описаний.
Целью изобретения является улучшение указанных характеристик устройства посредством статистического согласования устройства следящего преобразования с каналом передачи информации. Цель достигается тем, что в состав устройства введен блок управления скоростью разложения, позволяющий отслеживать контуры со скоростью, обратно пропорциональной кривизне считываемых участков кривой.
Причем его вход подключен к соответствующему выходу блока формирования сигналов продвижения на несущей частоте сканирования, а выход - к одному из входов блока формирования сигналов сканирования и перемещения.
Блок управления скоростью продвижения луча содержит последовательно соединенные частотный дискриминатор, фильтр низких частот и нелинейный усилитель, подключенный к одному из входов балансного модулятора, второй вход которого подключен ко входу частотного дискриминатора.
В результате такого схемного решения осуществляется декорреляция выходного сигнала считываемых изображений и лучшее согласование сигнала с каналом передачи, что позволяет при той же средней скорости разложения значительно уменьшить требуемую полосу канала передачи данных.
Как следствие первого, значительно увеличивается точность формирования описания или световая (контрастная) чувствительность системы разложения. Улучшается помехоустойчивость системы на криволинейных участках контура вследствие меньшего влияния шумов канала продвижения.
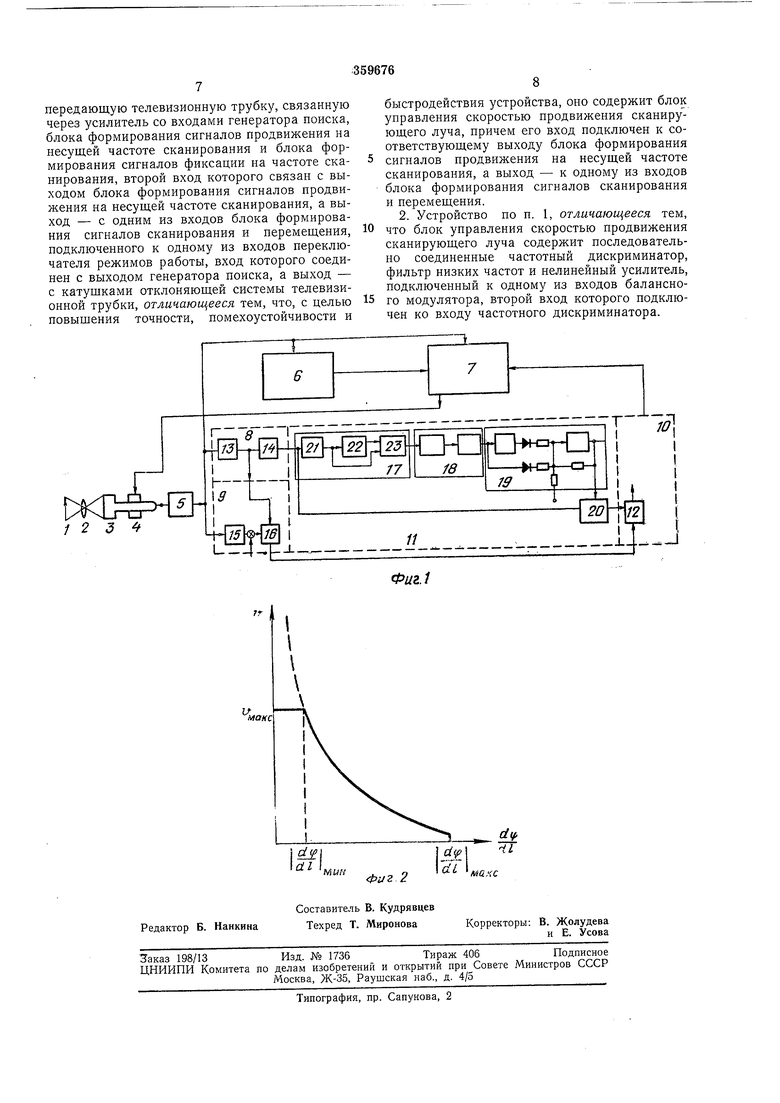
На фиг. 1 показана функциональная схема устройства для следящего преобразования; на фиг. 2 - график зависимости скорости преобразования от кривизны считываемого участка.
1 - объект преобразования; 2 - объектив; 3 - передающая телевизионная трубка; 4 - отклоняющая система; 5 - предварительный усилитель; 6 - генератор поиска; 7 - переключатель режимов работы; 8 - .блок формирования сигналов продвижения на несущей частоте сканирования; 9 - блок формирования сигналов фиксации на частоте сканирования; 10 - блок формирования сигналов сканирования и перемещения; // - блок управления скоростью продвижения разлагающего элемента; 12 - сумматор; 13 - фильтр первой гармонической составляющей; 14 - фазовращатель; 15 - фильтр низкочастотных составляющих видеосигнала фотоэлектрического преобразователя; 16 - балансный модулятор; 17 - частотный дискриминатор; 18 - фильтр низких частот; 19 - нелинейный усилитель; 20 - балансный модулятор; 21 - усилительограничитель; 22 - линия задержки; 23 - фазовый детектор; v - скорость преобразоваdjf
ния;- кривизна границы отслеживаемоdl
го изображения.
Устройство содержит передающую телевизионную трубку 3 с отклоняющей системой 4, предварительный усилитель 5, генератор поиска 6, переключатель 7 режимов работы, блок 8 формирования сигналов продвижения на не
сущей частоте сканирования; блок 9 формиро вания сигналов фиксации на частоте сканирования, блок 10 формирования сигналов сканирования и перемещения и блок 11 управления скоростью продвижения разлагающего
элемента.
Блок 8 формирования сигналов продвижения содержит фильтр 13 первой гармонической составляющей видеосигнала и фазовращатель
14на 90° на частоте несущей; блок 9 формирования сигналов фиксации содержит фильтр
15низкочастотных составляющих видеосигнала и балансный модулятор 16.
Блок // управления скоростью продвижения состоит из частотного дискриминатора 17,
фильтра 18 низких частот, нелинейного усилит&ля 19 и балансного модулятора 20. В состав частотного дискриминатора входят усилительограничитель 21, линия задержки 22 и фазовый детектор 23.
В качестве модулятора 20 используется кольцевой балансный модулятор, позволяющий изменять в большом диапазоне значений размах сигнала продвижения на несущей. В режиме поиска сканирующий элемент
устройства перемещается в плоскости разложения по определенной траектории.
При попадании в зону сканирования контрастной границы на выходе предварительного усилителя формируется сигнал, переключающий блок 7. Устройство переходит в режим
отслеживания. Положением сканирующего
зователя, выделенной фильтром 13, определяется наклоном границы. Поэтому эта составляющая после фазировки фазовращателем 14 непосредственно используется в качестве сигнала продвижения вдоль границы.
Анализ зависимости величины низкочастотных составляющих видеосигнала при смещении сканирующего элемента с границы показал возможность ее использования для формирования сигнала фиксации.
При нахождении центра сканирующего элемента на определенной изофоте или контрастной границе сумма сигналов - постоянного смещения VQ и низкочастотных составляющих с выхода фильтра 15 установлена так, чтобы сигнал с выхода балансного модулятора 16 отсутствовал.
Сканирующий элемент находится в состоянии устойчивого равновесия на границе (изофоте), перемещаясь по ней под действием сигналов продвижения. Если в результате внещнего возмущения или поворота границы (изофоты) сканирующий элемент сместится с границы, на выходе блока 9 появляется сигнал частоты сканирования, размах этого сигнала зависит от величины смещения центра сканирующего элемента с границы, а фаза определяется знаком смещения (на черное или белое), изменяясь на 180° при переходе центра сканирующего элемента через границу.
Сигналы, формируемые в канале продвижения, перемещают центр сканирующего элемента вдоль границы. Скорость продвижения пропорциональна размаху выходного сигнала продвижения и для участков контура малой
(1ф
меньщей
максимальна.
кривизны,
dl
dl
d-if
V Vo при
dl
При отслеживании более криволинейных участков на выходе частотного дискриминатора 17 формируется сигнал, который после обработки нелинейным усилителем 19 уменьщает размах высокочастотного сигнала продвижения на выходе балансного модулятора 20 и, тем самым, замедляет движение сканирующего элемента.
Анализ системы регулирования величины скорости продвижения сканирующего элемента показывает:
1)установивщееся значение скорости обратно пропорционально кривизне отслеживаемого участка кривой и соответствует требуемому закону изменения;
2)при выбранной структурной схеме блока управления скоростью характер переходного процесса установления величины скорости может быть сделан апериодическим;
3)при больщих коэффициентах усиления в блоке управления скоростью время установления скорости может быть сделано меньщим времени регулирования системы автоматического управления положением сканирующего элемента.
Учитывая результаты анализа выражение для скорости
V
d dl
можно записать в другой форме:
dl
df dl
N, dt dt
что соответствует сужению спектра частот сигнала продвижения на несущей при считывании любого сложного контура.
Величина получаемого при этом выигрыща по точности формирования углового или координатного описаний определяется диапазоном модуляции скорости разложения, статистическими характеристиками отслеживаемых изображений, их освещенностью и контрастом.
Помехоустойчивость устройства с модуляцией по скорости возрастает, так как уменьщаются динамические ощибки системы автоматического унравления на углах и криволинейных участках контура вследствие прохождения их с минимальной скоростью при сохранении прежнего быстродействия канала фиксации. При отслеживании тех же элементов контура уменьшается воздействие флюктуации канала продвижения, так как сокращается полоса пропускания канала продвижения.
Соотношение сигнал/номеха в канале продвижения при введении блока П управления скоростью продвижения уменьщается. Однако в случае использования таких систем для передачи изображений этим ухудшением можно пренебречь. Л1ожно показать, что наличие больших флюктуации в канале продвижения Зменьшает эффективность введения блока управления скоростью в два раза (уменьщает скорость обхода в два раза).
Можно приближенно рассчитать ожидаемое улучшение параметров устройства при введении переменной скорости преобразования
рез
V2
45
где Дрез - результирующее улучщение точности воспроизведения контуров; Д - то же, без учета наличия флюктуации в канале продвижения.
В случае отслеживания групп изображений, отличающихся различным распределением вероятности появления геометрических элементов различной кривизны, результирующий выигрыш по точности равен Дрез 1,5V3,2.
Использование аналогового устройства автоматического управления величиной скорости отслеживания (копирования) обеспечивает более полное статистическое согласование устройства и в реззльтате обеспечивает лучшие параметры устройства по быстродействию и точности отслеживания. передающую телевизионную трубку, связанную через усилитель со входами генератора поиска, блока формирования сигналов продвижения на несущей частоте сканирования и блока формирования сигналов фиксации на частоте сканирования, второй вход которого связан с выходом блока формирования сигналов продвижения на несущей частоте сканирования, а выход - с одним из входов блока формирования сигналов сканирования и перемещения, подключенного к одному из входов переключателя режимов работы, вход которого соединен с выходом генератора поиска, а выход - с катушками отклоняющей системы телевизионной трубки, отличающееся тем, что, с целью повышения точности, помехоустойчивости и быстродействия устройства, оно содержит блок управления скоростью продвижения сканирующего луча, причем его вход подключен к соответствующему выходу блока формирования сигналов продвижения на несущей частоте сканирования, а выход - к одному из входов блока формирования сигналов сканирования и перемещения. 2. Устройство по п. 1, отличающееся тем, что блок управления скоростью продвижения сканирующего луча содержит последовательно соединенные частотный дискриминатор, фильтр низких частот и нелинейный усилитель, подключенный к одному из входов балансного модулятора, второй вход которого подключен ко входу частотного дискриминатора.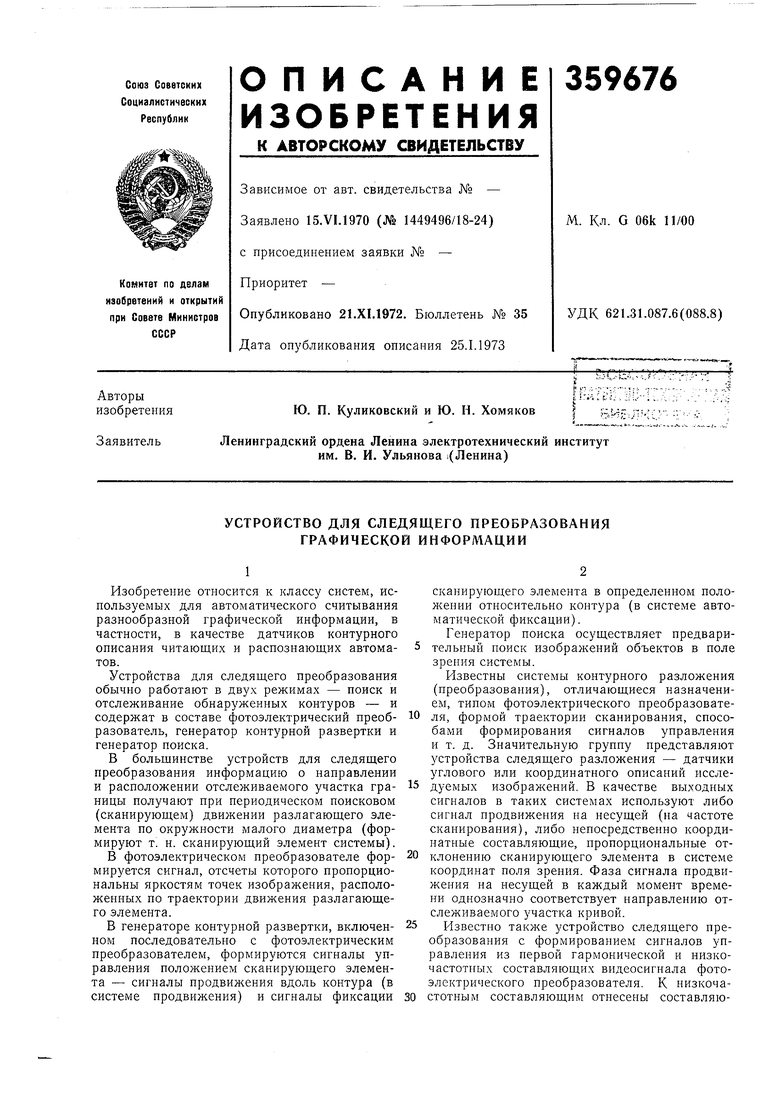
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО СЛЕДЯЩЕГО РАЗЛОЖЕНИЯ ПОЛУТОНОВЫХ ИЗОБРАЖЕНИЙ ПОИЗОФОТАМ И СИЛУЭТНЫХ ИЗОБРАЖЕНИЙ | 1968 |
|
SU217078A1 |
| УСТРОЙСТВО СЛЕДЯЩЕГО РАЗЛОЖЕНИЯ ИЗОБРАЖЕНИЯ | 1970 |
|
SU280529A1 |
| Устройство следящей развертки | 1974 |
|
SU558285A1 |
| СПОСОБ ПЕРЕДАЧИ ТЕЛЕВИЗИОННОГО ИЗОБРАЖЕНИЯ | 1971 |
|
SU311423A1 |
| СКАНИРУЮЩЕЕ УСТРОЙСТВО АВТОМАТИЧЕСКОГО ПОИСКА | 1972 |
|
SU330429A1 |
| ЧАСТОТНЫЙ ДИСКРИМИНАТОР СО СЛЕДЯЩЕЙ НАСТРОЙКОЙ | 1969 |
|
SU244421A1 |
| Устройство для определения координат экстремума яркости объекта | 1983 |
|
SU1152005A1 |
| Устройство демодуляции кодоимпульсных сигналов с фазовой манипуляцией | 1974 |
|
SU547973A1 |
| МОНОИМПУЛЬСНАЯ РЛС | 2004 |
|
RU2267137C1 |
| Фотоэлектрический отсчетный микроскоп | 1975 |
|
SU741042A1 |