и4 УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЙ МАЛЫХ УГЛОВЫХ СКОРОСТЕЙ

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для задания угла поворота | 1979 |
|
SU849269A1 |
| Устройство для контроля многополюсных вращающихся трансформаторов | 1979 |
|
SU868815A1 |
| Фазовая следящая система | 1976 |
|
SU779970A1 |
| Фазовая следящая система | 1975 |
|
SU543973A1 |
| Преобразователь угла поворота вала в фазовый сдвиг двух напряжений | 1975 |
|
SU632895A1 |
| Устройство контроля следящей системы передачи угла | 1976 |
|
SU651398A1 |
| Фазовая система для преобразованияуглА пОВОРОТА B КОд | 1979 |
|
SU842901A2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАЛЫХ УГЛОВЫХ СКОРОСТЕЙ | 1968 |
|
SU219296A1 |
| Устройство для проверки фазовращателей | 1975 |
|
SU525997A1 |
| Преобразователь угла поворота вала в фазовый сдвиг | 1979 |
|
SU855396A1 |
Изобретение относится к области автомйг тики и телемеханики и может быть нсполь зовано для измерения скорости поворота реей гндроскопических приборов
В настоящее время для измерения ниэsojx скоростей вращения используются ин« fQrkioioHHble и оптико ©лектро шые системы отличающиеся большой сложностью конструк ции и регулировки, но не обеспечивающие стабильные результаты в условиях эксплу™ атации и в силу этого ° требуемую то ность и диапазон измерений L-4iP
Известное устройство Для измерения лш пых угловых скоростей содержит мнргопо люсный датчике фазовращателЬе фазовый
дискриминатор, усилитель, исполнительный двигатель с редуктором и частотомер Исполнительный двигатель кинематически свезен с механическим модулятором датчика н через редуктор с валом фазовращате ля, а выходная обмотка датчика использо вана в качестве измерительной и подклю . чена S ВХОДУ частотом эа З
Однако данное устройство также имеет недостаткн ограничен нижний предел иэмеряемых скоростей, невысока точность измеренийе исполнительный двигатель необходимо соединять через редуктор с модулятором датчика, в результате чего увеличиваются габариты и вес конструкции, располагаемой непосредственно на испыту емом объекте.
Цель изобретения - повышение точности и расширение диапазона измеряемых скоростейа
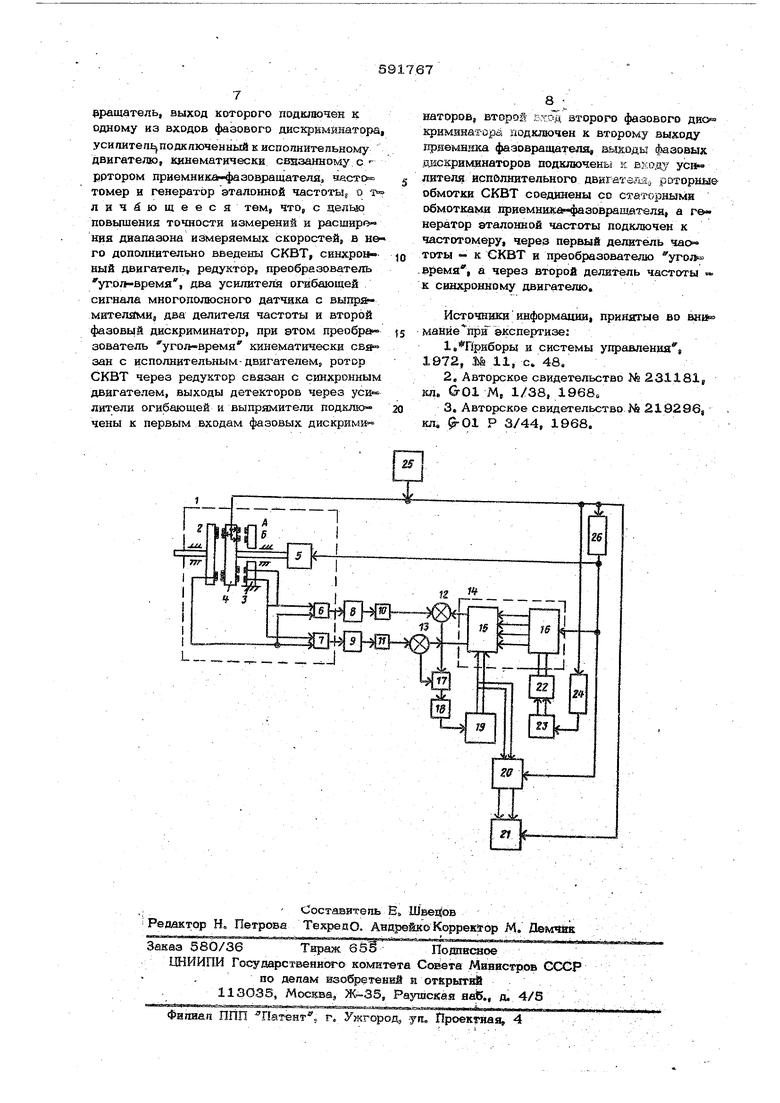
Поставленная цель достигается введением дополнительного СКВТ, синхронного двигателя, редуктора с дискретно регулируемым передаточным отношением, преобразователя угол-время, двух усилителей огибающих амшштудно-модулированных сигналов с детекторами, регулируемого и нерегулируемого делителей частоты, дополнительного фазового Д1аскримшштора, при атом преобразователь у ол-время кинематически связан с исполнительным двигателем, ротор дополнительного СКВТ связан через редуктор с аяскретао регулируемым передаточным отношеннем с синхронным двигателем, выходы детекторов датчика через усилители огибающих подключены к первым входам фазовых дискриминаторов, второй вход дополнительного фазового дя- скриминатора подключен к второму выходу фазовращателв приемнивса, выходы фазовых дискриминаторов подключены через сумматор к усилителю исполнительного дэ гателя, выход щэеобразователя угол р мя подключен к входам частотомера, pt ррные обмотки дополнительно СКВТ соед нены со статорнымв обмотками фазовращ гел5 -приемника, а синхронный двигатель через регулируемый делитель частоты подключен к источнику напряжения эталонной частоты, к которому подключен также через нерегулируекйый дeJштeль частоты статорная обмотка дополнительного СКВТ, вход преобразователя угол-время и двиг тель модулятора датчика. На чертеже изображен многополюсный - датчик 1, выполненный в виде трех дисков е многополюсными обмотками. Диск, святзанный с контролируемым адом, являетря ротором 2 датчика. Диск, жестко соединенный с корпусом, является статором 3 датчика. Средний диск выполняет роль м&ханического модулятора 4 и связан с ваглом синхронного двигателя 5, К входу де тектора 6 подключены обмотка Б статора 3 и обмотка ротора 2, а к входу детектора 7 подключены обмотка А статора 3 к обмотка ротора 2, Выходы детекторов 6 и 7 являются выходами датчика 1 и подключены к входам усилителей 8 и 9 ог№-бающих амплитудно-модулированных сигналов. Выходы усилителей 8 и 9 через детекторы 10 и 11 огибающих подключаются соответственно к первым входам фазовых дискриминаторов 12 и 13. На вторые 1вХоды фазовых дискриминаторов 12 и 13 поданы выходы фазовращател -приемника ,14, составленного из собственно фазовра щателя 15 с двумя выходами и дополнительного СКВТ 16, соединенного с фазсхвращателем 15 четырехпроводной линией связи (роторные обмотки дополнительного iCKBT соединены со статорнйми обмотками фазовращателя). Выходы фазовых дискриминаторов 12 и 13 через сумматор 17 подключены к вх ду усилителя 18, выход которого соединен с .обмоткой управления исполнительного двигателя 19,; Вал исполнительного двигвтеля 19 к нематическв связан с ротором фазовращате ля 15 и с ротором преобразователя Туголвремн 20, выполненнрго на.основе СКВТ Выход лреобразователя 20 подключен к частотомеру 21, работшошему в режиме измерения интервала вр,емени. Ротор ч подаительного СКВТ i 6 через редуктор с дискретно регулируемым передаточны) отношением кинематически с синхронным двигателем 23, который через регулируемый делитель частоты 24 (с переменным коэффициентом деления) питается от кварцевого эталона частоты 25, Выход эталона частоты 25 подключен также к обмоткам механического модулятора 4, к чао тотомеру 21 и через нерегулируемый де.литель частоты 2 &-К статорным обмоткам дополнительного СКВТ 16, к обмоткам двит гателя 5 и к входу преобразователя угол время 20, При подаче на обмотки механического модулятора А высокочастотного напряжения от эталона частоты 25 при вращении Mt дулятора двигателем 5 со скоростью,, fi а ротора связанного с измеряемым валом, со скоростью Я в обмотке ритора возникает модулированное высокочастотное напряжение, частота |Q огибающей которого равна: ia)- U) где р - число пар полюсов ротора. Частота огибающей напряжения в обмогм ке А статора 3, подключенной к детектору 7, равна (P MCi) 1Где(Р+х)1 число пар полюсов обмотки А статора К - нониусный коэффициент даа чика, Частота огибающей напряжения в обмот, ке Б статора 3, подключенной к детектору 6, равна:,, f., a,CP--K) где (Р - К) - числов пар полюсов обмотки В статора. На выходе детектора 6 имеем сумму вух сигналов с частотами fg и f коЛ суммарный сигнал можно приближенно рассматривать как аналог амплитудно-м.Ен дулированного сигнала с огибающей, ча тота которого равна -fo-fa iK SizE С5) во несущей, средняя частота которой равне| % а На выходе детектора 7 соответственио имеем сигнал с огибающей,. частота которой равна -fi-foS - aP и со средней йесущей частотой fo-bfi Усилители, огибакнпих; 8 и 9 работает соответственно на несущих частотах f н и f Н-- Нестабильность фаао-частотной xapaiu. теристикн, например усилителя 8, приводит к изменению фазы несущей на величину дЧ В предложенном устройстве погрешность д |fcj усилителя 8 приведет- к погрешности .измерения скорости, равной .. -F, . (to) 2l ;P-fHi t где Т - время измерения Из формулы (5) при 2 О следует ujK, а из формул (1), (3) и (6) при 9. О и следует 2-1 j что позволяет формулу (10) привести к виду 9. Детекторы 10 и 11 выдел$пот огибаю- щие усиленных сигналов, поступающие на входы фазовых дискриминаторов 12 и 13. Относительное изменение частоты огибающих на входах фазовых дискриминаторов равно F,-F2. 22a -U2.) Дискриминаторы 12 и 13 производят сра& нение по фазе огибающих и выходных напря жений фазовращателя Приемншса 14. Сигьналы рассогласования суммируются с помощью сумматора 17, усиливают ся усили телем 18 и поступают на обмотку управг ления исполнительного двигателя 19, кото рый осуществляет поворот ротора фазовращателя 15 до согласования фаз. огибающих и фаз выходных напряжений фазовращателя приемника 14, При этом поворачивается ротор преобразователя угол-время 2О, выполненного, например, в виде фазовраиш теля с двумя выходами. Временной интервал оС.„ между выходными сигналами преобр зователя 20, соответствующий углу поворо фазовращателя 15, измеряется с помощью частртомера 21. Такты измерения с интер- валом времени задаются от кварцевого эталона частоты 25, регистрация измере НИИ прои одится на цифропечатающем уст ройстве, подключаемом к частотомеру (на чертеже не показано). Угловая скорость поворота ротора датчика 1 определяется при этом BAS: При изме эении скорости более О|1 град fl час с помощью регулируемого делителя частоты 24| от которого питается си хронный двигатель 23, и редуктора 22 с дискретно регулируемым передаточным от ношенвем устанавливается такая скорость эталонного вращения: 2. g ротора дополнительного С КВТ 1вл чтобы следящая сиотема с фазовращателем 15 отрабатывала лищь отклонение етой эталонной скорости оУ измеряемой скорости Эталонная с ко рость и 5 определяется положениями пер& ключателей редуктора 22 и делителя часто ты 24, В этом случае угловая скорость ротора датчика 1 определяется как , Прн этом угловые частоты выходных женид, поступающих с выходов фазовращат&« ля 15 на вторые входы дискриминаторов 12 и 13, будут соответственно равны т н l, где лС, угловая скорость вращения рото ра дополнительного С КВТ 2ц- угловая скорость вр)ащения ротора фазовращателя 15 pJj- угловая частота кварцевого ата лона 25 ( коэффициент деления нерегулируем мого делителя частоты 26 Ко- коэффициент деления регулиру& мого делителя 24 Pgg- Число пар полюсов синхронног-о ; двигателя 23 d - передаточное отношение редукт ра 22. При работе устройства следящая систв ма с исполнительным двигателем 19 под держивает равенство частот сигналов, пск тупающих на входы фазовых дискриминаторов 12 и 13: для дискриминатора 12 PIРа для дискриминатора 13 i Рц Применение двухканальной системы сле жения с двумя дискриминаторами позвол ет компенсировать погрешности устройства от нестабильности влектроэлементов ь казк дом канале, вь}званной напоимео. таким фактором, как изменение температуры, так как в этом случае происходит одннаковое изменение параметров эпементов в каждом канапе. Формула BiaodpeTeHHS Устройство для намерения малых утло ых скоростей, содержащее 4ногополюсный атчик с механическим модулятором и дву. я выходными детекторами приемнивм} азоь
