1
Изобретение относится к области измерительной техники.
Известен способ линеаризации выходных характеристик магиитоуиругих датчиков 1 путем введения в магнитную цеиь воздушного зазора оиределенной -величины. В этом случае магнитное соиротивление цеии представляет собой сумму Нелинейного сопротивления ферромагнитного участка и большого линейного сопротивления воздушного зазора. Линейность характеристики суш,ественно повышается, но -при этом резко снижается чувствительность и увеличиваются другие составляюш,ие погрешности измерения датчика: температурная погрешность, нестабильность параметров источников питания, магнитоупругий гистерезис и др.
Известен также способ линеаризации выходных характеристик датчика 2 путем сужения рабочего диапазона, например, предварительным нагружением. Поскольку в данном случае используют только часть линейной характеристики, то относительная величина погрешности от нелинейности уменьшается. Однако и в этом случае за счет сужения рабочего диапазона пропорционально увеличиваются другие составляющие погрешности.
Отмеченные недостатки частично устранены при коррекции выходных характеристик в процессе нагружения датчика воздействием
на его магнитную систему путем изменения одного из параметров тока намагничивания, а именно, повышения частоты тока намагничивания с последуюш.им выделением гармонической составляющей -сигнала датчика 1. При этом значительное повышение линейности характеристики достигается только при работе на первой гармонической составляющей, на которую приходится 60-80% мощности выходного сигнала, что также снижает чувствительность датчика. Кроме того, аппаратура, используемая для повышения частоты тока и выделения одной из гармонических составляющих, значительно ус.пожняет измерительную систему в целом и снижает ее надежность.
Для повышения точности измерения магнитоупругих датчиков за счет уменьшения погрешности измерения, обусловленной нелинейностью выходной характеристики датчика, по предлагаемому способу линеаризацию характеристики магнитоупругих датчиков с квадратичной составляющей того или иного знака, имеющей, например, вид
i i, (l+bP± qP),
где i - ток в обмотке датчика;
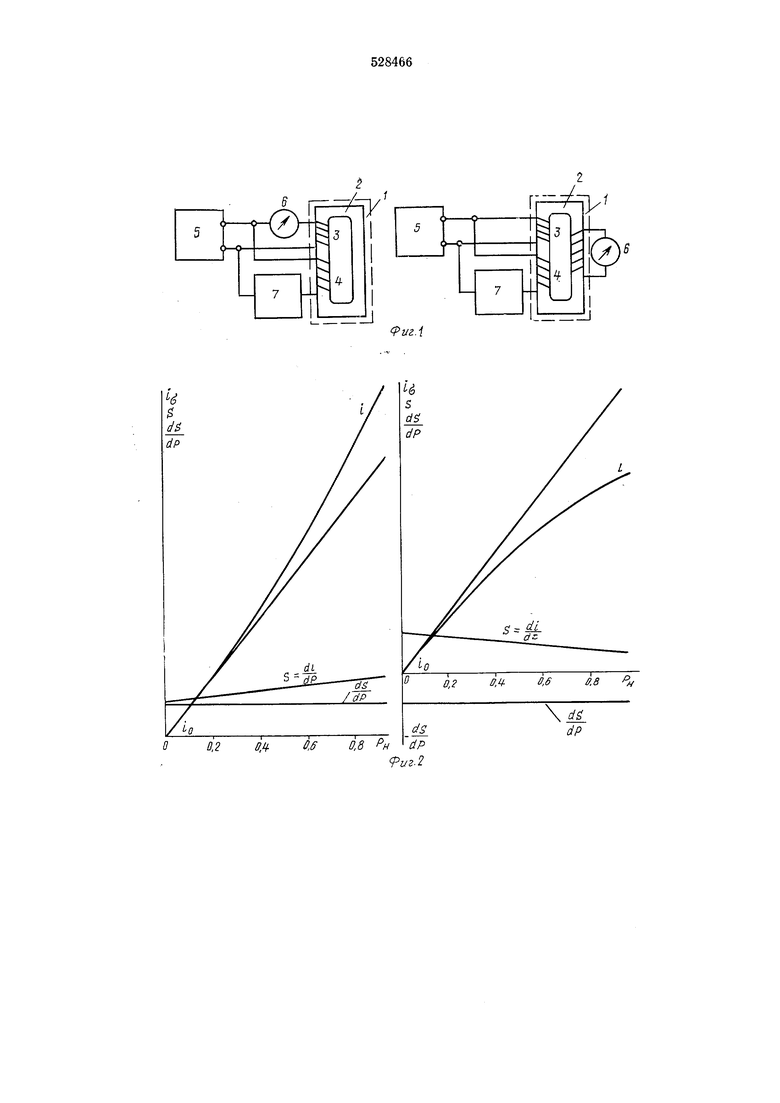
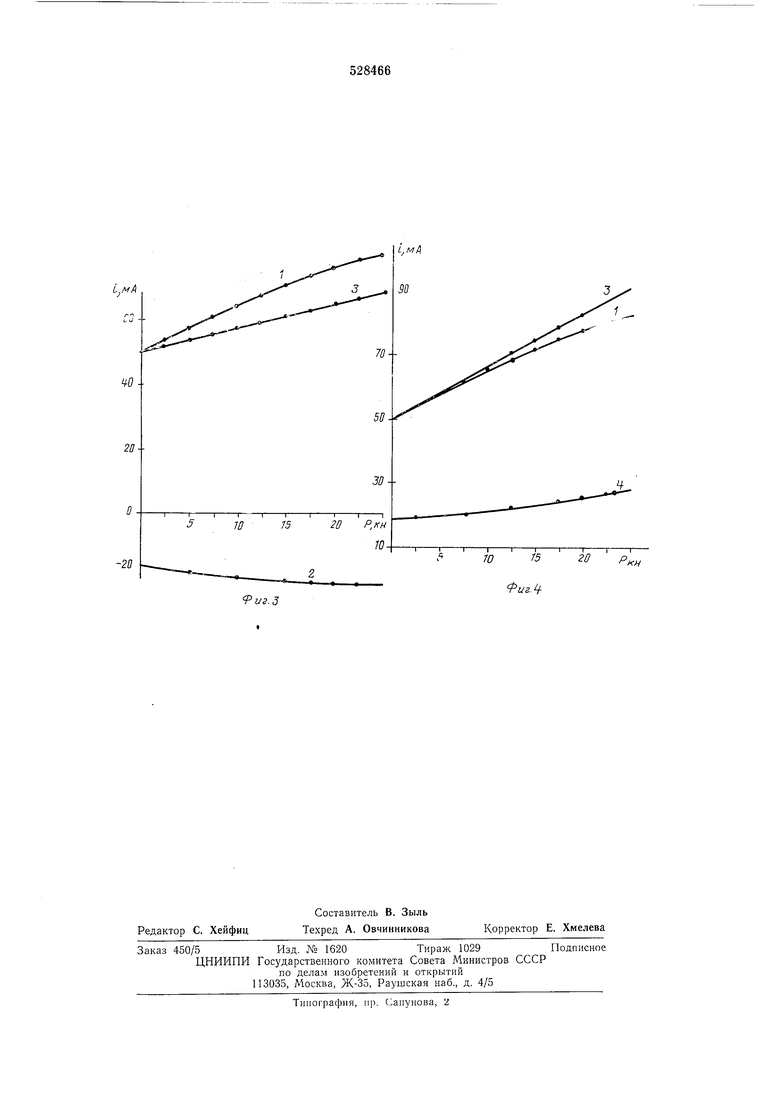
ID - исходное значение тока при Р 0; b - коэффициент при линейном слагае30мом;Ч - коэффициент при квадратичном члене;Р - измеряемая нагрззка, осуществляют путем воздействия, одновременно с началом нагружения на магнитонровод датчика дополнительным магнитным нотоком, создаваемым подмагничивающим током, нзменяющимся по зависимости, обратной квадратичной характеристике магнитоунругого датчика, определяемой из соотношения д 4(1 + 6дР±9дЯ), где БД Ь, ajqj Iq/. На фиг. 1 показана функциональная схема аппаратурной реализации нредложенного способа; на фиг. 2-диаграмма изменения тока намагничивания в соответствии с измеряемой нагрузкой; на фиг. 3, 4-графики линеаризации выходной характеристики магнитоунругого датчика. На фиг. 1 показаны магнитоупругий датчик I, содержаш,ий мапнитонровод 2 с основной 3 и дополнительной 4 обмотками, источник питания 5, регистрирующий прибор 6, узел коррекции 7. Практически величина нриращения чувствительности с ростом нагрузки остается неизменной (фиг. 2), вследствие чего характеристика датчика может быть описана, например, выражением вида i i,(l+bP±qP), где i - ток в обмотке датчика при неизменном напрял ении питания; Io - исходное значение тока при Р 0; b - коэффициент -при линейном слагаемом, характеризуюпл,ий чувствительность датчика на начальном участке характеристики; q - коэффициент при квадратичном члене, хараКтеризующий темп изменения чувствительности с ростом нагрузки;Р - измеряемая нагрузка. Ток i нри неизменной величине напряжения питания у эквивалентен проводимости. Нелинейность характеристики нри этом объясняется замедлением или возрастанием темна изменения проводимости. Созданием одновременно с началом нагружения датчика в его магнитопроводе дополнительного магнитного потока током нодмагничивапия, определяемым из соотношения (и-бдЯ р др), где и - значения токов дополнительной обмотки, приведенные к основной обмотке по известным формулам пересчета; Ьд - коэффициент нри линейном слагаемом; (7д - коэффициент нри квадратичном слагаемом; нри соблюдении условий , а |д|, обеспечивается пропорциональное приращение нроводимости у и нагрузки Р и тем самь м линеаризуется выходная характеристика датчика. В качестве примера реализации нредложенного способа рассмотрим случай, когда характеристика магпитоупругого датчика 1 имеет вид i /о (1+ЬР- qP% что соответствует кривым 1 (фиг. 3 и 4). В этом случае для линеаризации данной характеристики с помощью узла коррекции 7 и обмотки 4, соответственно включенной с обмоткой 3, подмагничиванием током д, определяемым из соотношения (1+ЬдЯ- дР) (см. фиг. 3, кривая 2) необходимо, чтобы коэффициент , а . Кривые I и 2 суммируются, т. е. происходит комненсация отставания темпа изменения тока i в соответствии с приращением нагрузки и на выходе 6 нолучаем линейную характеристику (фиг. 3, кривая 3). Приведенные графики показывают, что техническое решение ио данному изобретению позволяет новысить точность измерений магнитоунругими датчиками за счет повышения степени линейности выходных характеристик; при этом данный способ и его аппаратурная реализация не оказывают влияния на увеличение температурной, гистерезисной и других составляющих погрешностей. Формула изобретения Снособ линеаризации характеристики магнитоупругнх датчиков квадратичного вида нутем воздействия на состояние магнитной системы датчика в процессе нагружения, отличающийся тем, что, с целью новыщения точности измерения, нагружают датчик, при этом одновременно с началом нагружения в магнитонроводе датчика нодмагничивающим током создают дополнительный магнитный поток, изменяюшийся ио зависимости, обратной квадратичной характеристики магнитоупругого датчика. Источники информации, принятые во внимание нри экспертизе: 1.Авт. св. СССР 247567, кл. G OIL 1/12 1967. 2.Авт. св. СССР 324520, кл. G OIL 1/12, 1969.
| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитоупругий датчик усилий | 1975 |
|
SU552528A1 |
| Магнитоупругий датчик усилия | 1982 |
|
SU1173209A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВНУТРЕННИХ НАПРЯЖЕНИЙ В БЕТОННЫХ СООРУЖЕНИЯХ | 1971 |
|
SU309626A1 |
| Устройство для измерения усилий | 1976 |
|
SU690333A1 |
| Магнитоанизотропный датчик для измерения силы или деформации | 1974 |
|
SU561879A1 |
| Способ измерения механических напряжений | 1985 |
|
SU1273754A1 |
| Силоизмерительное устройство | 1981 |
|
SU998877A1 |
| Магнитоупругий датчик силы | 1981 |
|
SU991197A1 |
| Магнитоупругий датчик давления | 1981 |
|
SU970151A1 |
| Магнитоупругий датчик усилий | 1978 |
|
SU734513A1 |
О0,2 ,ff 0,8 РН 0,2 dl dp 9иг.2 0,4-S,6ff.8 a 9us.3 75 го p
