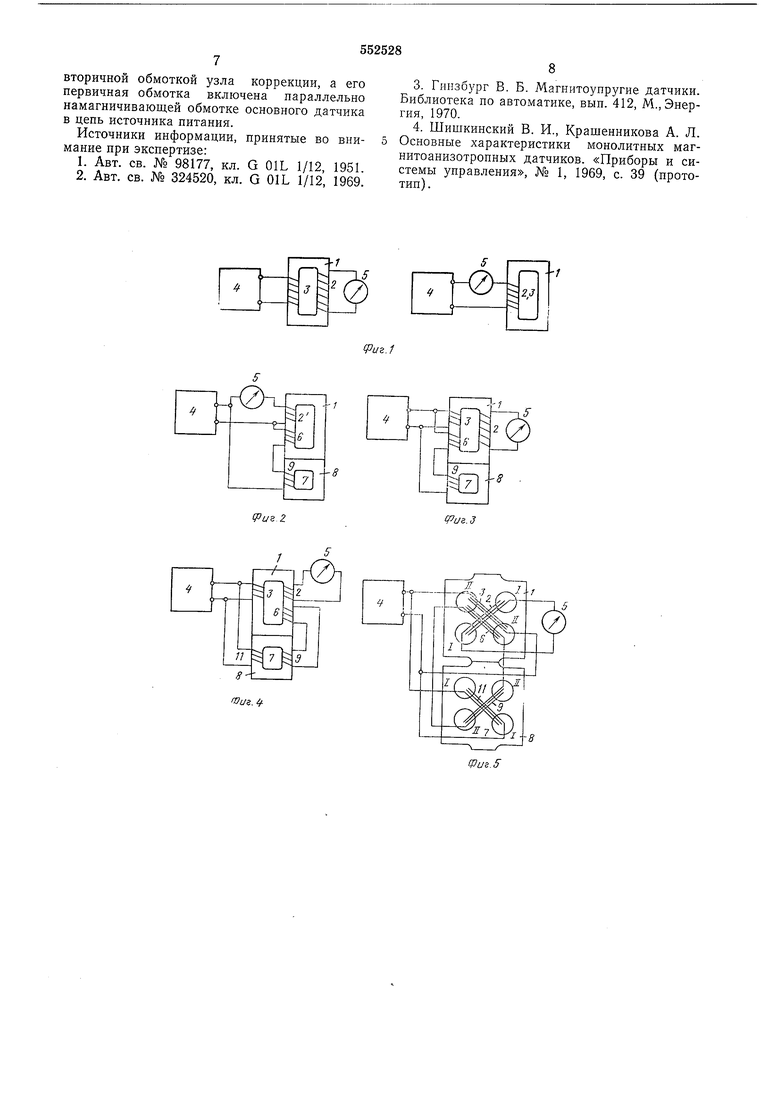
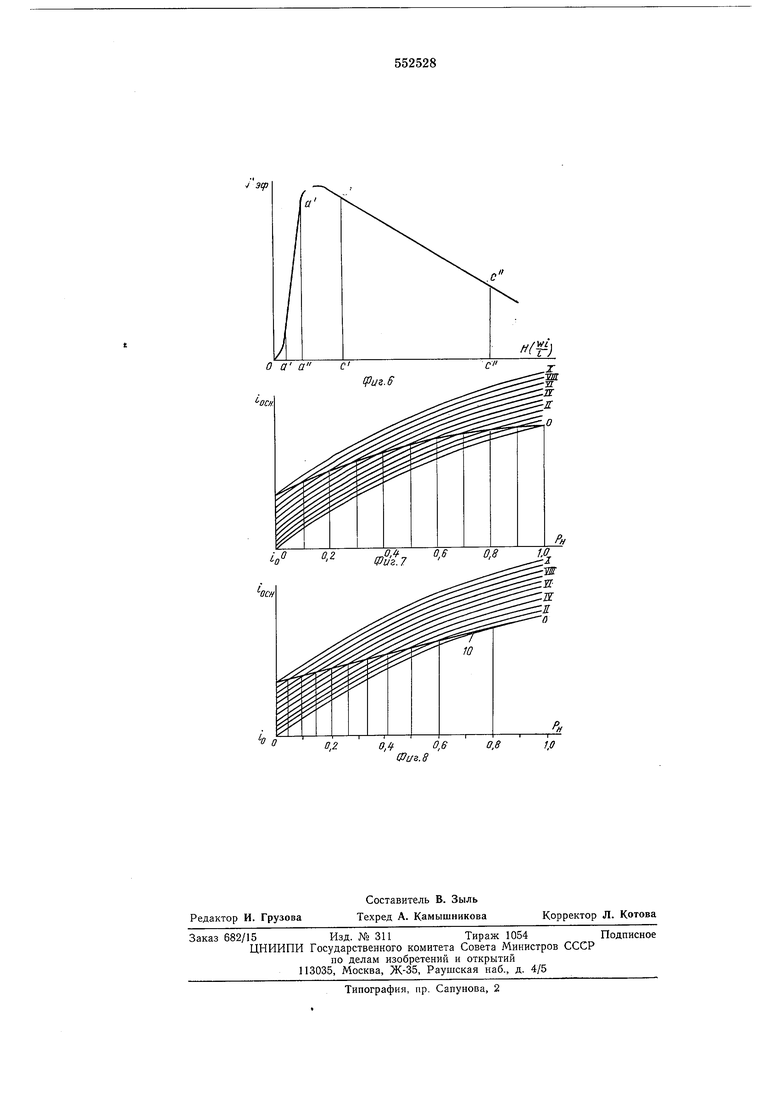
3 значительно усложняет весоизмерительную систему и понижает ее надежность. Таким образом, известные средства линеаризации характеристик неизбежно являются источником дополнительных погрешностей и5 приводят в отдельных случаях к усложнению весоизмерительной системы и снижению ее надежностн. Цель изобретения - повышение точности измерений за счет улучшения линейности вы-10 ходных характеристик магнитоупругих датчиков. Это достигается тем, что в магнитоупругий датчик усилий, содержащий магнитопровод, на котором размещены измерительная обмот-15 ка с регистрирующим прибором и намагничивающая обмотка, включенная в цепь питания, введены узел коррекции и дополнительная обмотка, причем узел коррекции включен последовательно с дополнительной20 обмоткой, расположенной на основном магнитопроводе, и выполнен в виде контактирующего с основным дополнительного магнитопровода с обмотками. При этом возможны два варианта: узел коррекции представляет25 собой датчик дроссельного типа, а дополнительная обмотка с последовательно подсоединенной обмоткой узла коррекции, включена параллельно намагничивающей обмотке основного датчика в цепь источника пита-30 ния; узел коррекции выполнен в виде трансформаторного датчика, причем дополнительная обмотка соединена последовательно с вторичной обмоткой узла коррекции, а его первичная обмотка включена параллельно на-35 магничивающей обмотке основного датчика в цепь источника питания. На фиг. 1 показана общая схема магнитоупругого датчика усилий; на фиг. 2-магнитоупругий датчик усилий дроссельного типа40 с узлом коррекции в виде датчика дроссельного типа; на фиг. 3-магнитоупругий датчик усилий трансформаторного типа с узлом коррекции в виде датчика дроссельного типа; на фиг. 4-магнитоупругий датчик усилий45 трансформаторного типа с узлом коррекции в виде трансформаторного датчика; на фиг. 5-трансформаторный магнитоупругий датчик усилий типа прессдуктор с узлом коррекции в виде датчика типа прессдуктор; на50 фиг. 6-кривая зависимости |д,/(Я); на фиг. 7-диаграмма линеаризации характеристики при строгой пропорциональности корректирующего тока измеряемому усилию; на фиг. 8-диаграмма линеаризации характери-55 стики при нелинейной зависимости корректирующего тока от усилия. Магнитоупругий датчик усилий (см. фиг. 1) содержит магнитопровод 1, имеющий звенья,60 которые изменяют свои характеристики благодаря магнитоупругому эффекту, а также измерительную 2 и намагничивающую 3 обмотки, причем последняя включена в цепь источника 4 питания. Последовательно в65 4 цепь обмотки 2 включен регистрирующий прибор 5. Магнитоупругий датчик дроссельного типа (фиг. 2) содержит основной магнитопровод 1, на котором расположена обмотка 2, совмещающая функции измерительной 2 и намагничивающей 3 (см. фиг. 1) обмоток. Обмотка 2 включена в цепь источника 4 питания. В цепь обмотки 2 последовательно подключен регистрирующий прибор 5. Кроме того, на магнитопроводе 1 размещены дополнительная обмотка 6, в цепь которой последовательно включен узел 7 в виде дроссельного датчика, корректирующий величину тока в дополнительной обмотке 6 в соответствии с приращением общей проводимости датчика на единицу усилия Р. Дополнительный магнитопровод 8 узла коррекции 7 контактирзет с магнитопроводом 1 и через него также воспринимает прикладываемое усилие Р. Обмотка 9 узла коррекции соединена последовательно с дополнительной обмоткой 6 и включена параллельно обмотке 2 в цепь источника 4 питания, В большинстве случаев магнитоупругие силоизмерители работают при магнитных напряженностях Я в материале магнитопровода, отличающихся от значений, соответствующих максимуму магнитной проницаемости, т. е. на участке а-а или, преимущественно, на участке с-с кривой д,/(Я) (фиг. 6). На этих участках изменение магнитной напряженности Я в материале магнитопровода 1 приводит к существенному изменению его магнитной проницаемости, а следовательно, и проводимости Y датчика. На участке а- а увеличение напряженности Я вызывает уменьщение проводимости У, а на участке с-с - увеличение проводимости У магнитопровода 1. Нелинейность характеристики датчика отражает непостоянство приращения его проводимости Y на единицу усилия Р по мере увеличения его воздействия на магнитопровод 1. Для обеспечения линейности характеристики необходимо дополнительное приращение проводимости У на единицу усилия Р. С этой целью используется дополнительная обмотка 6, в цепь которой включен узел 7 коррекции, в данном случае дроссельный датчик. На фиг. 7 приведены характеристики датчика, полученные при различных величинах тока i в дополнительной обмотке 6 при нагружении датчика усилием Р (участок с-с кривой .i f(H), обмотки 2 и 6 включены встречно). Кривые I-X (см. фиг. 8) получены путем ступенчатого увеличения тока в дополнптельной обмотке 6 с сохранением его неизменного значения во всем диапазоне усилий Р. Кривую 10, соответствующую линеаризованной характеристике, получают за счет последовательного увеличения тока в дополнительной обмотке по мере роста усилия, воздействующего на датчик. Процесс линеаризации цроисходит следующим образом. При воздействиц усилия Р на магцитопроводы 1, 8 цроводимость датчика возрастает. Величина тока, проходящего через обмотку 9 узла 7 коррекции и затем через дополнительную обмотку 6, также растет. Увеличение тока в дополнительной обмотке на единицу приложенного усилия Р влечет за собой некоторое уменьшение проводимости У датчика. Это приращение складывается с приращением проводимости У, вызванным воздействием усилия Р. Уменьшение проводимости У, вызванное узлом коррекции, оказывается больше, при малых усилиях и по мере роста усилия воздействия узла 7 убывает. В результате обеспечивается постоянство приращения проводимости датчика во всем диапазоне контролируемых усилий, т. е. получаем линеаризованную характеристику (фиг. 8, кривая 10). При работе датчика на частке а-а кривой .1 /(Я) (фиг. 6) процесс аналогичен, но для соответствия знаков приращений дополнительная обмотка 6 должна создавать магнитный поток, направленный согласно с основным, т. е. ее нужно включить в противофазу по сравнению с описанным вариантом. Магнитоупругий датчик усилий трансформаторного типа (фиг. 3) содержит основной магнитопровод 1, измерительную 2, намагничивающую 3 обмотки. Намагничивающая обмотка 3 включена в цепь источника 4 питания, а измерительная 2 последовательно соединена с регистрирующим прибором 5, с которого снимают сигнал, соответствующий измеряемому усилию. На магнитопроводе 1 расположена дополнительная обмотка 6, в цепь которой последовательно включен узел 7 в виде дроссельного датчика, корректирующий величину тока в дополнительной обмотке 6 в соответствии с приращением его проводимости на единицу усилия. Принцип линеаризации характеристик магнитоупругого датчика усилий трансформаторного типа аналогичен описанному для устройства на фиг. 2. Трансформаторный датчик усилий (фиг. 4) содержит элементы 1-9, указанные на фиг. 2, 3. В качестве узла 7 коррекции в данном устройстве использован трансформаторный датчик, вторичная обмотка 9 которого соединена цоследователыго с дополнительной обмоткой 6, включенной согласно или встречно с основной намагничивающей обмоткой 3, а первичная обмотка 11 включена в цель источника 4 питания параллельно намагничивающей обмотке 3. При работе датчика с трансформаторным «орректирующим датчиком действует тот же принцип коррекции величины тока в дополнительной обмотке 6. В данном случае при воздействии усилия на магнитонроводы 1, 8 магнитная проницаемость датчика уменьшается, вследствие чего понижается и напряжение, наводимое на вторичной обмотке 9 датчика. При этом уменьшается ток i в доцолнительной обмотке 6, что приводит к соответствующему изменению нацрян ения на измерительной обмотке 2. Трансформаторный датчик типа прессдуктор (фиг. 5) содержит магнитоировод 1, уложенные в сквозных назах магиитопровода 1 измерительную 2 (I-I) и намагничивающую з (П-П) обмотки. Намагничивающая обмотка 3 (И-И) включена в цепь источника 4 питания, а измерительная обмотка 2 (I-I) соединена с регистрирующим прибором 5. Совместно с основной намагничивающей обмоткой 3 уложена дополнительная обмотка 6. Дополнительная обмотка 6, включенная встречно или согласно с обмоткой 3, соедийена последовательно с вторичной обмоткой 9 (И-И) лзла 7 коррекции, выполненного в 2,Д трансформаторного датчика типа прессдуктор, содепжащего дополнительный магнитопровод о, контактиолЮЩии с основным магнитопооводом 1. Первичая обмотка 11 (I-I) корректирующего датчика включена в цепь источника 4 питания параллельно с намагничивающей обмоткой 3. Принцип линеаризации характеристик магнитоупругого датчика прессдукторного типа аналогичен описанному для устройства на фиг. 4. Таким образом выполнение магнитоупругих силоизмерителей с узлом коррекции позволило повысить точность магнитоупругих датчиков за счет снижения погрешности от нелинейности характеристик датчиков, без повышения остальных составляющих погрешности: температурной, гистерезиса и т. д. Формула изобретения 1. Магнитоупругий датчик усилий, содержащий магнитопровод с размещенными на нем измерительной обмоткой, подключенной к регистрирующему прибору и намагничивающей обмоткой, включенной в цепь питания, о т л и ч а ю щ и и с я тем, что, с целью повышения точности датчика путем улучшения линейности ет-о выхо.дных характеристик, в него введены дополнительная обмотка и узел коррекции, выиолненпый в виде контактирующего с основным дополнительного магнитопровода с обмотками и включенный последовательно в цепь дополнптельной обмотки, а последняя расположена на основном магнитопроводе. 2.Датчик по п. 1, отличающийся тем, что узел коррекции выполнен в виде датчика дроссельного типа, а дополнительная обмотка с последовате.льно подсоединенной обмоткой узла коррекции включена параллельно намагничивающей обмотке основного датчика в цень источника питания. 3.Датчик по п. 1, отличающийся тем, что узел коррекции выполнен в виде трансформаторного датчика, причем дополнительпая обмотка соединена последовательно с
вторичной обмоткой узла коррекции, а его первичная обмотка включена параллельно намагничивающей обмотке основного датчика в цепь источника питания.
Источники информации, принятые во внимание при экспертизе:
1.Авт. св. № 98177, кл. G OIL 1/12, 1951.
2.Авт. св. № 324520, кл. G OIL 1/12, 1969.
8
3.Гинзбург В. Б. Магнитоупругие датчики. Библиотека по автоматике, выи. 412, М., Энергия, 1970.
4.Шишкинский В. И., Крашенникова А. Л. Основные характеристики монолитных магнитоанизотропных датчиков. «Приборы и системы управления, № 1, 1969, с. 39 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитоупругий датчик усилия | 1982 |
|
SU1173209A1 |
| Способ линеаризации характеристики магнитоупругих датчиков квадратного вида | 1975 |
|
SU528466A1 |
| Магнитоупругий датчик усилий | 1982 |
|
SU1049760A1 |
| Способ уменьшения температурнойпОгРЕшНОСТи BECOB | 1979 |
|
SU821966A1 |
| Магнитоупругий датчик давления | 1981 |
|
SU970151A1 |
| Весовое реле | 1977 |
|
SU726434A1 |
| Устройство для измерения усилий | 1977 |
|
SU690334A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОМПОНЕНТОВ ТЕНЗОРА МЕХАНИЧЕСКИХ НАПРЯЖЕНИЙ В ИЗДЕЛИЯХ ИЗ ФЕРРОМАГНИТНЫХ МАТЕРИАЛОВ | 2011 |
|
RU2489691C1 |
| Устройство для измерения усилий | 1975 |
|
SU547652A1 |
| Магнитоупругий датчик | 1973 |
|
SU473912A1 |
cpue.Z
Vae.
эср
0,4-0,6
(ffifs.8
