|Кабел- и другое. В то же время усложнение системы путем пространственного разнесе.ния сюновного и резервного электрического :каналов для достижения устойчивой работы |при воздействии дестабилизирующих .факторов приводит к значительным экономическим затратам, поскольку стотлость канала nepeU (дачи электрических сигналов может быть |сравнимой или превьвдэхь. стоимость;. аппа. |затуры телемеханической системы. Цель изобретения - повышение нести работы и упрощение телемеханичео кой системы в условиях действия деста;билиз1фую11шх факторов различного физичес кого характера.
) Достигается это благодаря тому, что ре|3ервный канал передачи сигналов управле-; |ния выполнен в виде трубопровода, на передающей стороне введен преобразователь электрических сигналов в неэлектрические сигналы, вход которого соединен с вторым выходом решающего элемента, а выход подключен к трубопроводу, на приемной сторо не исполнительный элемент также подключен к этому трубопроводу.
Переносчиком сигналов в резервном Kjaнале является поток, рабочего тела, предназначенный для приведения в действие испсш |нительного элемента, или материальный noiток вещества.
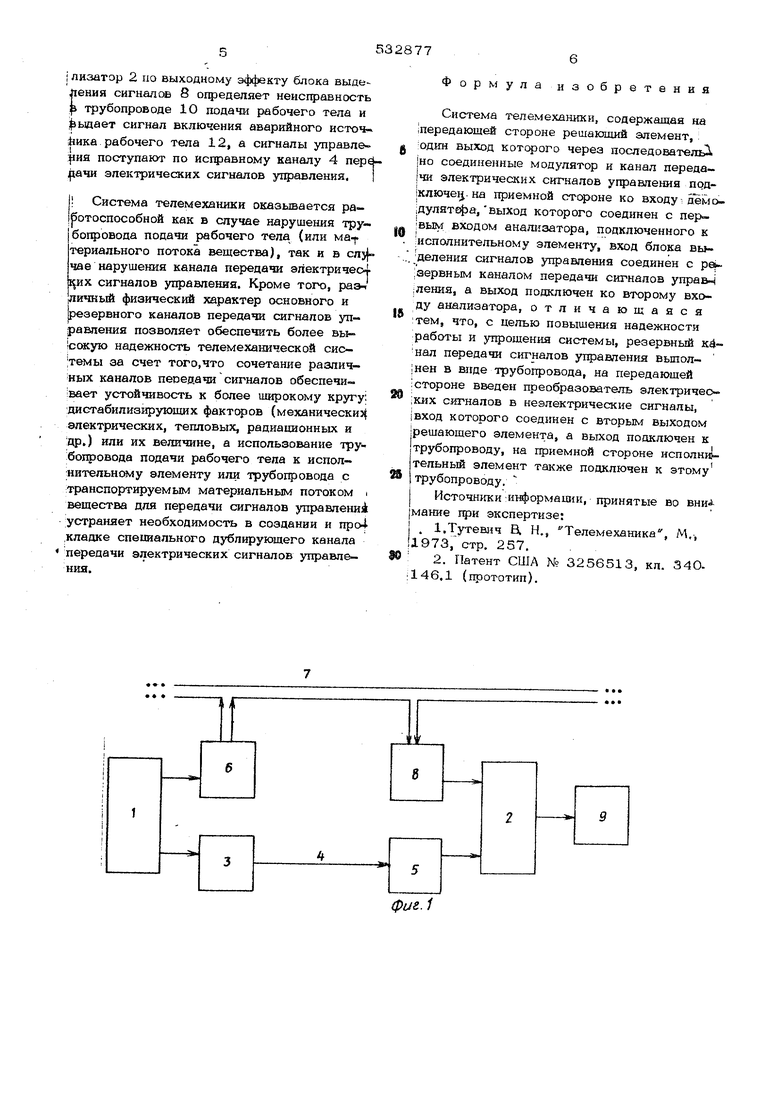
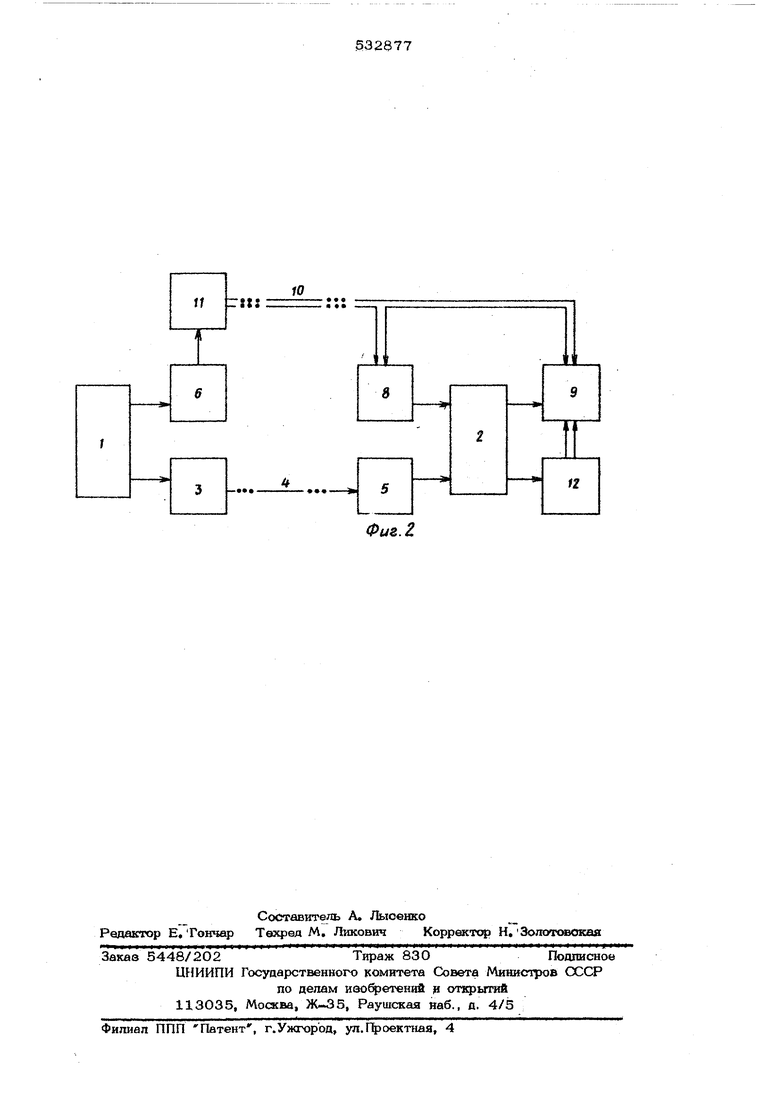
{ На фигД изофажена схема системы с использованием в качестве канала передачи сигналов управления трубопровода с (гериальным потоком вещества; на фиг. 2 схема системы с использованиетл в качает-, fee резервного канала передачи сигналов уп равления трубопровода с рабочим телом, ва- jpHaHT.
f Схемы содержат решающий элемент 1, анализатор 2, модулятор 3, канал 4 передачи электрических сигналов управления, демодулятор 5, преобразователь 6 электричефких сигналов управления в неэлектрические трубопровод 7 с транспортируемым материч. альным потоком вещества, блок выделения сигналов 8 и исполнительный элемент 9.
Система работает следующим образом. j Модулятор 3, канал передачи электричесютх сигналов управления 4 и демодулятор 5 обеспечивают передачу сигналов управления от решающего элемента 1 к исполнительному элементу 9. Этот канал резервируется каналом передачи сигналов управления в виде трубопровода 10 подачи рабочего тела к исполнительному элементу (см.фи1 2) или трубопровода с транспортируемым материальным потоком вещества (см. фиг. 1).
На перепаюгпей стороне сигнал управления с решающего элемента 1 подается од овременно на модулятор 3 и на преобразо Ьатель 6 электрических сигналов управле ия в неэлектрические. Последний преобразует электрический сигнал, выдаваемый с решающеги элемента в неэлектрический cmv. ал, изменяющий через источник рабочего 1т«ла 11 параметры, потока рабочего тела рли непосредственно в трубопроводе 7 параметры материального потока вещества, например, давление, скорость, соотношение компонент и т.д. Таким 1феобравоБателем 4ожет служить насос, дроссельная-заслонka с электрическим приводом, управляемый |вентиль,измеряющий плотность и состав I компонент рабочего тела или материально. го потока вещества и прочее. Изменения параметров потока рабочего 1тел.а и материального потока вещества вы-1 (бираются такимиэ чтобы они не оказывали ВЛИЯНИЯ на нормальную работу исполнитель ного элемента или н использование мате
риального потока вещества и его целевому, назначению, но превышали величину нестабильности изменяемых параметров, что не- ;обходимо для выделения передаваемого сш нала управления.
На приемной стороне изменения парамет ров потока рабочего тела ялй материально-j го потока вещества с помощью блока вьще ;ления сигналов 8 преобразуются в электри-)- . ческий сигнал управления, поступающий на
1ВХОД анализатора 2 и с его выхода на иополнительньй элемент 9. В качестве эле|ментов блока 8 могут быть использованы датчики давления, измерители скорости дви- :жения потоков, плотномеры, индикаторы co-i
отношения той или иной компоненты и т.д. Резервный неэлектрический канал перейачи сигналов управления является независимым от канала передачи электрических сигналов управления, а переносчиком сигналов в нем является рабочее тело, предка; значенное, даже при отсутствии передачи по рему сигналов, для приведения в действие J (исполнительного элемента или материальный поток вещества, используемый по другому
назначению.
: Анализатор 2 воспринимает сигналы с вЬ 1ходов демодулятора 5 и блока вьщеления; сигналов 8, анапизгфует их и подает на
рход исполнительного элемента 9.
Аварийный источник рабочего тела 12, эасположенный вблизи исполнительного элеviSHTa 9, обеспечивает работоспособность системы в случае повреждения трубопровода
юдачи рабочего тела (например, при разрушении трубопровода, по которому подает ря рабочее тело). В этом случае параметрь рабочего тела изменяются настолько, что .нормальное функциоинрование исполнительtioro элемента 9 невозможно. При этом ана-
i лизатор 2 по выходному эффекту блока выделения сигнале 8 определяет неисправность трубопроводе 10 подачи рабочего тела и рыдает сигнал включения аварийного источ 1ика рабочего тела 12, а сигналы управле ия поступают по исщзавному каналу 4 передачи электрических сигналов управления, |
Система телемеханики оказьшается ра отоспособной как в случае нарушения трубогфовода подачи рабочего тела (или ма териального потока вещества), так и в сл5|чае нарушения канала передачи электричеоу сигналов упрйвления. Кроме того, раэ личньй физический характер основного и резервного каналов передачи сигналов управления позволяет обеспечить более вы1сокую надежность телемеханической сис|тетиы за счет того.что сочетание различ «ых каналов передачисигналов обеспечи1вает устойчивость к более широкому дистабилизирующих фактфов (механически: электрических, тепловых, радиационных и др.) или их величине, а использование трубопровода подачи рабочего тела к исполнительнсяиу элементу или трубопровода с транспортируемым материальным потоком i вещества для передачи сигналов управлениА устраняет необходимость в создании и проД ,кладке специального дублирукидего канала передачи электрических сигналов управления.
Формула изобретения
Система телемеханики, содержащая на |передающей стороне решающий элемент, :один выход которого через последователь но соединенные модулятор и канал передачи электрических снггнапов угфавления под|ключе1. на приемной стороне ко входу i Немо|дулятфа,выход которого соединен с пер|вым входом анализатора, подключенного к исполнительному элементу, вход блока вы деления сигналов управления соединен с ре зервным каналом передачи сигналов управн ;ления, а выход подключен ко второму входу анализатора, отличающаяся :тем, что, с целью повышения надежности работы и упрощения системы, резервный кА нал передачи сигналов управления выпол|нен в виде трубопровода, на передающей :стороне введен преобразователь электричес ;ких сигналов в неэлектрические сигналы, {вход которого соединен с вторым выходом |решающего элемента, а вьжод подключен к трубопроводу, на приемной стороне исполни тельный элемент также подключен к этому трубопроводу.
Источники :информаш1и, принятые во вни мание 1ФИ экспертизе:
I . 1.Тутевич Д Н., Телемеханика, М,-, Ц973,стр. 257..
2. Патент США № 3256513, кл. 340: 146.1 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ТЕЛЕМЕХАНИЧЕСКОГО КОНТРОЛЯ И УПРАВЛЕНИЯ УДАЛЕННЫМИ ОБЪЕКТАМИ С ИСПОЛЬЗОВАНИЕМ КАНАЛА СВЯЗИ GSM GPRS, ЕДИНОГО СЕРВЕРА ТЕЛЕМЕХАНИКИ И ТЕЛЕМЕХАНИЧЕСКАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2455768C2 |
| Способ телемеханического контроля и управления удаленными объектами | 2016 |
|
RU2642365C1 |
| УСТРОЙСТВО ДЛЯ ТЕЛЕУПРАВЛЕНИЯ И ТЕЛЕСИГНАЛИЗАЦИИ | 1995 |
|
RU2111545C1 |
| Система для передачи и приема данных с решающей обратной связью | 1978 |
|
SU734893A1 |
| Устройство для контроля системы телемеханики с решающей обратной связью | 1981 |
|
SU1029208A1 |
| Система высокочастотных каналов связи и телемеханики | 1986 |
|
SU1378070A1 |
| Устройство для передачи сигналов телемеханики по трубопроводному каналу | 1976 |
|
SU947896A1 |
| Система для передачи команд телеуправления и телеизмерения | 1974 |
|
SU639002A1 |
| Устройство управления насосной установкой | 1989 |
|
SU1767232A1 |
| ТЕЛЕМЕХАНИЧЕСКАЯ СИСТЕМА "ЛИЛАНА-ВИЯ" И СИГНАЛИЗАЦИОННОЕ ЗАГРАЖДЕНИЕ С ИЗВЕЩАТЕЛЕМ В.И. ЯЦКОВА | 2012 |
|
RU2491646C1 |
10
гя:
