Изобретение относится к области систем обработки и сбора данных по мобильным каналам связи, с использованием глобальной компьютерной сети Internet. Изобретение может быть использовано при построении архитектур систем телемеханики для распределенных технических объектов контроля и управления.
Немалое количество промышленных производств имеет распределенный характер. Под распределенностью понимается территориальное разделение функциональных производственных участков-узлов, реализующих технологические функции, и их территориальная удаленность от центрального узла - ядра системы, в котором принимается то или иное решение о порядке реализации технологического цикла. С учетом существенной географической распределенности узлов технологического производства, их большого числа, сложности реализуемых ими функций, задача приемопередачи, обработки первичных данных и выработки соответствующего управляющего решения может быть весьма сложной. Поэтому дистанционный мониторинг и управление удаленными объектами - весьма важная и актуальная задача, решение которой состоит из двух аспектов:
- принципиального решения о методе, способе сбора первичных данных с объектов контроля и управления, и передаче их в центральный узел системы (диспетчерский пункт);
- технического решения о системе дистанционного мониторинга и управления, реализующей выше обозначенные принципы.
Существуют различные способы телемеханического контроля и управления удаленными объектами [1-3]. Известные способы включают выполнение стандартной последовательности операций, заключающейся в том, что при использовании технических средств:
- собирают данные о состоянии удаленных объектов;
- осуществляют преобразование данных в требуемую (наиболее удобную для передачи) форму;
- передают данные по каналам связи на пункты более высокой иерархии;
- осуществляют оконечное управление удаленными объектами по командам с диспетчерского пункта;
- прием данных, их обработку и визуализацию организуют при использовании специального программного обеспечения (в том числе SCADA-технологий).
В качестве программно-аппаратного решения для диспетчерского пункта в настоящее время типовым является применение многосерверной архитектуры с установленным на ней соответствующим программным обеспечением на базе SCADA-технологий. С одной стороны, это позволяет визуализировать данные о параметрах объектов в режиме реального времени и, в итоге, повысить эффективность взаимодействия диспетчера и сервера в составе человеко-машинной системы контроля и управления, с другой стороны, требует существенных программно-аппаратных затрат, свойственных для таких решений, которые, в итоге:
- характеризуются сложностью и избыточностью программно-аппаратной реализации, в связи с классическим разделением функций SCADA и WebSCADA между несколькими компьютерными станциями - узлами архитектуры;
- ограничивают набор устанавливаемого оборудования, выдвигают дополнительные требования к нему, усложняют процесс настройки и наладки систем телемеханики;
- ограничивают возможности доступа удаленных конечных пользователей, связанных с дополнительным лицензированием точек доступа, что является принципиальной ограничительной чертой систем телемеханики подобного типа.
Телемеханические системы контроля и управления распределенными объектами существуют и применяются [4-6].
Типовая телемеханическая система имеет в своем составе:
- массив удаленных терминалов, реализующих функции сбора данных с объектов контроля и управления, оконечное управление этими объектами по поступающим командам, а также приемопередачу данных по существующим каналам связи на пункты более высокой иерархии. Терминалы могут представлять собой измерительные и управляющие приемопередающие устройства;
- диспетчерский пункт, осуществляющий прием, обработку и представление данных от массива удаленных терминалов, а также реализующий функции управления в автоматическом либо автоматизированном режимах. Диспетчерский пункт может представлять собой выделенную одиночную компьютерную станцию (сервер), либо компьютерную сеть;
- коммуникационная система, включающая в свой состав канал связи. Коммуникационная система может быть ориентирована на применение множества проводных стандартных интерфейсов (RS-485, Industrial Ethernet, оптоволокно) с использованием соответствующих промышленных протоколов (MODBUS, PROFIBUS, CAN, TCP/IP), а также может быть ориентирована на применение беспроводных каналов связи: выделенный радиоканал FM, GSM GPRS с использованием соответствующих протоколов. В целях обеспечения надежности и отказоустойчивости коммуникационная система может использовать различные каналы связи. Назначение коммуникационной системы - приемопередача данных от массива удаленных терминалов к диспетчерскому пункту.
Особый интерес представляют телемеханические системы, в которых в качестве канала связи используется GSM GPRS. Отличительными чертами этого канала связи является широкая зона покрытия в пределах населенных пунктов и дорог, доступность, относительная дешевизна использования.
Ввиду широкого распространения телемеханических систем с использованием SCADA (WebSCADA), следует отметить следующие особенности применения этих программно-аппаратных систем:
- программно-аппаратное решение предполагает, как минимум, двухсерверную конфигурацию. При этом один из серверов (SCADA), будучи связанным с устройствами (контроллерами) нижнего уровня по выделенным каналам связи (в основном, электрические сигналы промышленных стандартов: ток, напряжение, последовательные импульсные/цифровые интерфейсы), выполняет функции приемопередачи, обработки, визуализации, хранения данных. Другой сервер (WebSCADA), реализованный на базе выделенного Internet-сервера со статическим IP-адресом и связанный с первым упомянутым сервером по каналам Intranet/Internet, реализует «экспозицию» данных в Web, т.е. приемопередачу их удаленным пользователям. Данная двухсерверная конфигурация не является оптимальной с точки зрения компактности, функциональности и стоимости;
- тип оборудования, устанавливаемого на нижнем уровне системы, строго оговорен в соответствующем перечне SGADA, и связан с набором устанавливаемых на нижнем уровне устройств и их драйверов. Это, в свою очередь, вводит ограничения по номенклатуре применяемой аппаратной части;
- количество точек ввода/вывода данных на нижнем уровне системы, равно как и количество точек доступа к данным системы, строго регламентируется приобретенными программными средствами и лицензиями. Расширение системы во всех отношениях может быть связано с существенной переконфигурацией, приобретением дополнительного программного обеспечения, драйверов, лицензий, что существенно сдерживает дальнейшее развитие телемеханической системы.
В силу отмеченных особенностей и обстоятельств применение SCADA (WebSCADA) в телемеханических системах характеризуется громоздкостью, избыточностью архитектуры и программно-аппаратного обеспечения, что является принципиальным недостатком.
Известен способ телемеханического контроля и управления, в соответствии с которым сбор первичных данных и оконечное управление объектом осуществляют при помощи микропроцессорного блока управления, связанного со средством приемопередачи сигналов по каналу сотовой связи, приемопередачу данных осуществляют с мобильных телефонов лиц, принимающих решения [1].
Недостатки указанного способа следующие:
- применение микропроцессорного блока с ограниченной функциональностью не позволяет принимать с объекта массив характеризующих его сигналов;
- применение общего понятия «канал сотовой связи» не позволяет оценить качество и эффективность приемопередачи данных;
- применение в качестве средства приемопередачи данных на стороне пункта управления мобильного телефона существенно ограничивает функциональность системы и лишает способ и реализующую его систему необходимой обработки данных, что не удовлетворяет требованиям большинства промышленных систем.
Известен способ телемеханического контроля и управления, применяемый для контроля и регулирования режима работы трубопровода, в котором сбор информации реализуют посредством узла средств измерений и микропроцессорного контроллера, передачу первичных данных от контролируемого пункта к пункту управления осуществляют посредством применения радиомодемов, в качестве устройства сбора и обработки данных в пункте управления используют компьютерную станцию [2].
Способ можно охарактеризовать следующими недостатками:
- в способе не прослеживается унификация системы сбора данных и управления, применение первичной аппаратуры ориентировано на сбор данных о режиме работы трубопровода;
- использование выделенного радиоканала не является оптимальным решением в условиях существования покрытия территорий стандартной сотовой связью, например GSM 900/1800;
- применение в качестве устройства сбора данных и управления обособленной локальной компьютерной станции не позволяет организовать просмотр и обработку данных на других компьютерных станциях, имеющих выход в локальные или глобальные компьютерные сети.
Известен способ телемеханического контроля и управления, применяемый для мониторинга и управления состоянием станций катодной защиты Тверца-900 «Тверца монитор», в котором сбор первичных данных о состоянии объектов производят с использованием микропроцессорной измерительной системы, а передачу данных в диспетчерский пункт - посредством приемопередачи. SMS по каналу сотовой радиосвязи GSM 900/1800 [3].
Упомянутому способу присущи следующие недостатки:
- применение в качестве информационных посылок SMS по радиоканалу GSM 900/1800 ограничивает функциональные возможности системы;
- применение в качестве устройства сбора и обработки данных обособленной локальной компьютерной станции не позволяет масштабировать систему сбора, обработки данных и дистанционного управления объектами на другие компьютерные станции, включенные в локальные или глобальные компьютерные сети.
Известна система телемеханического контроля и управления, содержащая специализированный блок сопряжения для сбора информации о состоянии удаленного объекта, а также приема данных от блока контроля и управления, передачи данных об объекте по каналу сотовой связи и стабилизации контролируемого параметра [4].
Недостатки упомянутой системы телемеханического контроля и управления:
- малая размерность количества входов блока сопряжения не позволяет вводить массив характеризующих объект сигналов;
- ограниченная функциональность блока сопряжения, которая позволяет реализовать только режим стабилизации одного из параметров объекта;
- отсутствие функций обработки и преобразования данных в блоке сопряжения и блоке контроля и управления;
- применение общего понятия «канал сотовой связи» не позволяет оценить качество и эффективность приемопередачи данных;
- ограниченная функциональность блока контроля и управления, при этом не ясны функции по визуализации данных, их приемопередаче на другие узлы принятия решений, использованию для этого компьютерных сетей как локальных, так и глобальных.
В итоге, приведенные сведения по системе не позволяют оценить эффективность применения (если это имеет место) SCADA (WebSCADA) в данном случае.
Известна система телемеханического контроля и управления, содержащая контроллеры для сбора данных и оконечного управления объектом, радиоканал для приемопередачи данных из пункта управления, модемы, установленные на оконечных сторонах радиотракта и подключенные в пункте управления к компьютерным станциям [5].
Однако описанной системе присущи следующие недостатки:
- сбор данных с контролируемых пунктов производится только при использовании аналоговых и дискретных входов и не предполагает работу со стандартными цифровыми интерфейсами (RS-232, RS-485, CAN);
- сложная архитектура реализации указывает на применение необоснованно сложных способов приемопередачи данных;
- использование выделенного радиоканала не является оптимальным решением в условиях существования покрытия территорий стандартной сотовой связью, например GSM 900/1800;
- использование на обеих сторонах приемопередачи данных специализированных модемов усложняет архитектуру системы и повышает затраты как при проектировании, так и при эксплуатации;
- ограниченность функций приемопередачи, визуализации, обработки и хранения данных в пункте управления, не раскрыты эти функции при использовании компьютерных локальных и глобальных сетей.
В итоге, приведенные сведения по системе не позволяют оценить эффективность применения (если это имеет место) SCADA (WebSCADA) в данном случае.
Известна система телемеханического контроля и управления, реализуемая программно-техническим комплексом «СКАТ-4» и применяемая для мониторинга и управления распределенными объектами, содержащая измерительный комплекс в качестве средства сбора первичных данных, выделенные физические линии, которые могут быть использованы в качестве средств приемопередачи данных с нижнего на верхний уровень, выделенные/коммутируемые телефонные линии, выделенные радиоканалы, GSM GPRS, локальные компьютерные станции для сбора и обработки данных, подключенные посредством локальных сетей к коммутационному, коммуникационному серверам и серверу базы данных [6].
Недостатки упомянутой системы:
- использование единого протокола информационного обмена для различных коммуникационных сред приемопередачи данных с нижнего уровня на верхний является избыточным по отношению к различным типам интерфейсов;
- архитектура системы содержит большое количество серверов, реализующих различные функции, связанных с распределенной SCADA. В общем, система характеризуется избыточностью, громоздкостью, низкими функциональностью и надежностью;
- отсутствие масштабирования автоматизированных рабочих мест диспетчеров в глобальные компьютерные сети, тем более, без приобретения дополнительных лицензий.
Наиболее близким техническим решением для способа, принятым за прототип, является способ [7], используемый при телеметрии, телесигнализации и телеуправлении в области объектов электрических сетей, и заключающийся в том, что:
- устанавливают на удаленных объектах контроллеры телемеханики;
- используют специальные коммуникаторы, формирующие массив аналоговых, дискретных и цифровых первичных данных;
- используют коммуникаторы массива выходных команд для управления состоянием объектов;
- используют терминалы GSM, которые регистрируют в GSM сети и, используя сервис GPRS, подключают к Internet через шлюз оператора сотовой связи;
- приемопередачу данных осуществляют с использованием протокола на основе стека TCP/IP;
- используют Internet-сервер с выделенным статическим IP-адресом;
- используют серверы сбора и обработки данных;
- программное обеспечение сервера формируют из сервера каналов, конфигуратора сервера каналов, сервера опроса, конфигуратора сервера опроса, модуля телемеханики и управления, конфигуратора контроллеров, базы данных, сервера отчетов, WEB сервера;
- автоматизированное рабочее место оператора оснащают специальным программным продуктом, обеспечивающим обмен с Internet-сервером, визуализацию данных и прочие сервисные функции;
- обеспечивают доступ к просмотру данных об удаленных объектах.
Прототипу свойственны следующие недостатки:
- большое количество программных продуктов, составляющих программно-аппаратный комплекс, не является оптимальным;
- Internet-сервер и другие программные средства требуют существенных аппаратных ресурсов (не исключено их размещение на нескольких серверных станциях), что усложняет архитектуру системы, уменьшает быстродействие, снижает надежность, увеличивает ее стоимость;
- для отображения информации о состоянии удаленных объектов необходимо использовать специальную программу автоматизированного рабочего места, которая может быть установлена на ограниченном количестве компьютерных станций, при условии приобретения соответствующих лицензий.
Общие признаки описания [7] позволяют судить о том, что в данном случае в качестве ядра системы используется программно-аппаратный комплекс с использованием компонентно распределенной SCADA (WebSCADA). Поэтому все перечисленные недостатки способа можно отнести к принципиальным по отношению к SCADA (WebSCADA).
В качестве прототипа системы выбрана телемеханическая система контроля и управления, применяемая в нефтедобывающей отрасли [8].
Иерархия описываемой системы трехуровневая. На первом уровне системы телемеханики - станках-качалках нефтедобывающих скважин, насосных установках, пунктах учета тепловой и электрической энергии - устанавливаются измерительно-вычислительные комплексы «МЕГА». Они производят сбор данных с объекта контроля и управления, передают данные по каналу GSM GPRS на контроллер связи, установленный на втором иерархическом уровне системы и подключенный к серверу сбора данных и управления. Информация об объектах доступна диспетчерам, специалистам и руководителям на автоматизированных рабочих местах (АРМ), представляющих третий уровень иерархии. Массив компьютерных станций АРМ подключается к серверу сбора данных и управления с использованием проводных каналов связи. Общий поток данных от объекта к диспетчеру (специалисту, руководителю), таким образом, проходит следующие программно-аппаратные узлы: данные от объекта (первый уровень) - комплекс «МЕГА» (первый уровень) - канал связи GSM GPRS - контроллер связи (второй уровень) - сервер сбора данных и управления (второй уровень) - массив АРМ (третий уровень).
Программное обеспечение сервера сбора данных и управления, а также автоматизированных рабочих мест (АРМ) представляет собой компонентно распределенную SCADA (WebSCADA).
Однако принципы построения и функционирование рассмотренной телемеханической системы не свободны от недостатков:
- недостаточная в описании системы информация о типе используемого программного протокола пакетной передачи данных не позволяет однозначно судить об эффективности примененных принципов маршрутизации, адресации и защиты данных, унификации этого решения по отношению к существующим стандартным сетевым протоколам;
- использование SCADA предполагает необходимость подборки, установки и настройки на компьютерах АРМ соответствующей операционной системы, драйверов и прочего специализированного программного обеспечения;
- информация, поступающая с объектов контроля и управления, доступна только для ограниченной группы пользователей, на компьютерах которых произведены все соответствующие настройки.
Применяемые SCADA (WebSCADA) могут быть собственной разработкой, либо разработкой известных фирм. При этом нужно иметь в виду, что процесс разработки SCADA достаточно сложен и требует существенных временных и финансовых затрат, что не может не отразиться на стоимости готового программного продукта. То есть локальность рассматриваемой системы влечет за собой необходимость приобретения соответствующих лицензий.
Таким образом, при использовании SCADA (WebSCADA) формируется система, рассчитанная на работу с ограниченным количеством устройств нижнего и верхнего уровней. Использование SCADA (WebSCADA) подразумевает размещение ее на нескольких программно-аппаратных серверах, требует существенных вычислительных ресурсов, компонуется из множества программных модулей, что, в итоге, обуславливает ее громоздкость, подверженность ошибкам и сбоям, относительно медленное выполнение функций.
Также подобные системы характеризуются ограничением количества точек доступа к данным (станций оператора, диспетчерских пунктов), что не всегда является удобным - диспетчер может просмотреть всю необходимую информацию об объектах контроля и управления только со своего АРМ.
Задачей настоящего изобретения является создание компактной, функциональной и надежной телемеханической системы с неограниченным количеством точек регламентированного доступа к информации о состоянии удаленных объектов путем исключения SCADA (WebSCADA) из реализации проекта за счет:
- введения в архитектуру системы единого сервера телемеханики, реализованного на базе выделенного Internet-сервера со статическим IP-адресом, одновременно обеспечивающего приемопередачу и обработку данных как на удаленные объекты контроля и управления, так и на автоматизированные рабочие места удаленных пользователей (функционально совмещенного в одном блоке);
- организации неограниченного регламентированного удаленного доступа к информации о состоянии объектов контроля и управления, при использовании стандартных Internet-браузеров, с возможностью контроля доступа и защиты информации в порядке классификации имен пользователей и применения системы паролей.
Технический результат заключается в обеспечении возможности реализации эффективного дистанционного мониторинга и управления состоянием удаленных объектов при использовании недорогих каналов связи GSM GPRS, стека протоколов TCP/IP, программно-аппаратного обеспечения сети Internet, единого сервера телемеханики, выполненного путем функционального совмещения сервера сбора данных и управления и выделенного Internet-сервера со статическим IP-адресом, на одной программно-аппаратной платформе, комплекса серверных программных средств, установленного на едином сервере телемеханики и выполняющем функции визуализации, обработки и хранения данных, что обеспечивает архитектурную и программно-аппаратную компактность ядра телемеханической системы, повышает ее быстродействие, расширяет функциональность, снижает стоимость разработки и эксплуатации, повышает практическое удобство при использовании, что, в итоге, выгодно отличает данную систему от аналогов.
Технический результат достигается применением способа телемеханического контроля и управления, заключающемся в том, что:
- на каждый удаленный объект устанавливают контроллеры телемеханики, представляющие собой в настоящей системе контроллеры телеуправления;
- с помощью контроллеров телеуправления собирают массивы данных по аналоговым, дискретным и цифровым интерфейсам (RS-232, RS-485, CAN), а также реализуют удаленное управление;
- используют автоматизированные рабочие места;
- для приемопередачи данных между сервером телемеханики и контроллерами телеуправления используют протокол на основе стека TCP/IP;
- в центре сбора и обработки данных устанавливают единый сервер телемеханики, который реализуют на базе выделенного Internet-сервера со статическим IP-адресом, путем совмещения функций приемопередачи данных с нижнего уровня системы на верхний, на одной программно-аппаратной платформе;
- на едином сервере телемеханики устанавливают комплекс серверных программных средств для одновременного выполнения функций как по приемопередаче, так и по визуализации, обработке и хранению данных;
- просмотр данных об удаленных объектах и выдачу команд управления организуют при использовании стандартных Web-браузеров с заданием IP-адреса единого сервера телемеханики;
- доступ к просмотру данных и выдаче команд управления на удаленные объекты при использовании стандартных Web-браузеров регламентируют системой имен пользователей (login) и паролей (password);
- в качестве каналов связи единого сервера телемеханики, удаленных контроллеров телеуправления и автоматизированных рабочих мест используют линии Internet.
Описанный способ может быть реализован телемеханической системой контроля и управления удаленными объектами, содержащей собственно удаленные объекты, контроллеры телеуправления с интегрированными модемами GSM GPRS, каналы периферийной связи, антенно-фидерные устройства контроллеров телеуправления, GSM GPRS-каналы приемопередачи данных с использованием программного протокола на основе стека TCP/IP, антенно-фидерные устройства мобильного оператора, GSM GPRS-сервер мобильного оператора связи, сервер сбора данных и управления, выделенный Internet-сервер со статическим IP-адресом, автоматизированные рабочие места, а также комплекс серверных программных средств, Internet-канал связи, обеспечивающий обмен данными между GSM GPRS сервером мобильного оператора связи, сервером сбора данных и управления и автоматизированными рабочими местами, при этом:
- сервер сбора данных и управления функционально совмещен с выделенным Internet-сервером со статическим IP-адресом, с получением единого сервера телемеханики;
- комплекс серверных программных средств установлен на едином сервере телемеханики и реализован средствами Web-программирования;
- комплекс серверных программных средств состоит из подпрограммы приемопередачи и подпрограммы визуализации, обработки, хранения данных;
- данная система обеспечивает неограниченное количество точек регламентируемого доступа к информации об удаленных объектах, при использовании стандартных Web-браузеров с заданием IP-адреса единого сервера телемеханики, применения системы имен пользователей (login) и паролей (password).
Технический результат обеспечивается тем, что:
- сбор данных и управление удаленными объектами осуществляется контроллерами телеуправления с использованием периферийных каналов связи. Приемопередача данных осуществляется с использованием интегрированных в контроллеры телеуправления модемов GSM GPRS и соответствующих антенно-фидерных устройств. Контроллеры телеуправления используют доступные недорогие каналы связи GSM GPRS, стек протоколов TCP/IP, что позволяет применять для приемопередачи данных программно-аппаратные средства каналов связи сети Internet;
- GPRS-сервер мобильного оператора связи осуществляет приемопередачу, адресацию и маршрутизацию пакетов данных в системе протокола TCP/IP каналов связи Internet, что позволяет организовать сквозной обмен данными между удаленными контроллерами телеуправления и единым сервером телемеханики, с обеспечением высокой скорости и достоверности передачи данных;
- совмещение на единой программмно-аппаратной платформе серверных аппаратных средств (единого сервера телемеханики) и комплекса серверных программных средств, состоящего из подпрограмм приемопередачи, визуализации, обработки и хранения данных и выполненного при использовании Web-программирования, позволяет сформировать оптимальное по объему, функциональности, надежности и быстродействии ядро телемеханической системы, что принципиально выгодно отличает рассматриваемую систему от архитектур с использованием SCADA;
- компоновка ядра системы на едином сервере телемеханики позволяет масштабировать систему (подключать дополнительные устройства нижнего и верхнего уровней приемопередачи данных) телемеханики при условии минимальных дополнительных программно-аппаратных, материальных и трудовых затрат;
- данная система обеспечивает неограниченное количество точек регламентируемого доступа к информации об удаленных объектах, при использовании стандартных Web-браузеров с заданием IP-адреса единого сервера телемеханики, применения системы имен пользователей (login) и паролей (password).
В итоге, применение заявляемых способа и телемеханической системы позволяет осуществить эффективный дистанционный мониторинг и управление удаленными объектами.
На фиг.1 приведена архитектура телемеханической системы контроля и управления удаленными объектами, содержащая собственно удаленные объекты 1; контроллеры телеуправления с интегрированными модемами GSM GPRS 2; каналы периферийной связи 3; антенно-фидерные устройства контроллеров телеуправления 4; GSM GPRS каналы приемопередачи данных 5; антенно-фидерные устройства мобильного оператора 6; GSM GPRS сервер мобильного оператора связи 7; Internet-канал связи 8; единый сервер телемеханики 9 с установленным на нем комплексом серверных программных средств 10, состоящим из подпрограммы приемопередачи данных 11 и подпрограммы визуализации, обработки и хранения данных 12; каналы связи Intranet/Internet 13; автоматизированные рабочие места 14.
Контроллеры телеуправления 2 через канал периферийной связи 3 считывают данные и осуществляют оконечное управление удаленными объектами 1 (по аналоговым, дискретным входам и цифровым интерфейсам).
В начале своей работы контроллеры телеуправления 2 при использовании антенно-фидерных устройств 4 обнаруживают сеть 5 стандарта GSM 900/1800, формируют запросы регистрации через антенно-фидерные устройства 6 и GPRS сервер мобильного оператора 7 на единый сервер телемеханики 9, используя протокол TCP/IP Internet-канала связи 8. Единый сервер телемеханики 9 имеет статический адрес и порт в системе адресации TCP/IP. При регистрации на едином сервере телемеханики 9 каждый контроллер телеуправления 2 получает динамический адрес и порт в системе адресации TCP/IP, этот адрес единый сервер телемеханики 9 хранит как идентификатор контроллера телеуправления 2 в течение всего сеанса связи. После регистрации на едином сервере телемеханики 9 контроллер телеуправления 2 готов к передаче данных о режиме и параметрах работы удаленного объекта 1, а также к приему команд управления от станций автоматизированных рабочих мест 14 через единый сервер телемеханики 9.
Для удержания канала связи 5, через определенные интервалы времени, контроллер телеуправления 2 формирует тестовые посылки KEEP ALIVE на единый сервер телемеханики 9.
В процессе работы контроллер телеуправления 2 регулярно обновляет данные о режиме и параметрах работы удаленного объекта 1. В контроллере телеуправления 2 могут быть реализованы специализированные алгоритмы обработки данных: аналоговая/цифровая фильтрация, функция приема данных при нестабильном ответе удаленного объекта 1 через цифровые интерфейсы, а также функции «скользящего среднего» для основных параметров ее работы. Полученные данные передаются через определенные интервалы времени, которые формирует единый сервер телемеханики 9, направляя запросы в контроллер телеуправления 2. Кроме того, в системе телемеханики может быть организован внеочередной запрос данных, по команде с автоматизированного рабочего места 14, имеющего право такого запроса. Режим работы удаленных объектов 1 также может быть изменен по команде с автоматизированного рабочего места 14, имеющего право реализации команд управления. Связь автоматизированных рабочих мест 14 с единым сервером телемеханики 9 осуществляется по каналу связи Intranet/Internet 13.
В случае возникновения определенных событий (открытие/закрытие двери объекта, включение/выключение питания ~ 220 В, 50 Гц, возникновение ошибки удаленного объекта 1) контроллер телеуправления 2 самостоятельно инициирует и формирует информационные посылки на единый сервер телемеханики 9. Работа и приемопередача данных от контроллера телеуправления 2 в случае выключения питания ~ 220 В, 50 Гц осуществляется при использовании резервного источника питания (аккумулятора).
Данные, приходящие от массива «удаленные объекты 1 - контроллеры телеуправления 2», обрабатываются в комплексе серверных программных средств 10 единого сервера телемеханики 9. Этот программный комплекс, состоящий из подпрограммы приемопередачи данных и подпрограммы их визуализации, позволяет принимать, обрабатывать, визуализировать, хранить данные по каждой учетной точке удаленных объектов 1.
Единый сервер телемеханики 9 имеет статический адрес и порт в системе адресации TCP/IP, что позволяет реализовать регистрацию и доступ к подпрограмме приемопередачи данных 11, организующей связь с массивом контроллеров телеуправления 2, и организовать доступ к подпрограмме визуализации данных 12, обеспечивающей связь с массивом станций автоматизированных рабочих мест 14. В результате диспетчер (специалист, руководитель) может просмотреть данные о каждом удаленном объекте 1, задав IP-адрес в строке собственного браузера станции автоматизированного рабочего места 14, введя имя (login) и пароль (password). При этом открывается экранная форма WEB-интерфейса, предоставляющая функции просмотра, обработки данных по каждому удаленному объекту 1, а также функции управления (зависит от прав пользователя).
Таким образом, заявляемые способ телемеханического контроля и управления удаленными объектами и телемеханическая система предполагают прохождение данных через три следующих уровня преобразования: объекты 1 (первый уровень) - контроллер телеуправления 2 (первый уровень) - канал связи GSM GPRS 5 - сервер GPRS мобильного оператора 7 (второй уровень) - единый сервер телемеханики 9, подпрограмма приемопередачи данных 11 комплекса серверных программных средств 10 (второй уровень) - единый сервер телемеханики 9, подпрограмма визуализации, обработки и хранения данных 12 комплекса серверных программных средств 10 (третий уровень) - автоматизированное рабочее место 14 (третий уровень).
Единый сервер телемеханики позволяет совместить в одном функциональном блоке второй и третий уровни приемопередачи данных в архитектуре системы и, таким образом, на одной программно-аппаратной платформе одновременно реализовать как функции приемопередачи данных от контроллеров телеуправления удаленных объектов, так и функции обработки, передачи этих данных на автоматизированные рабочие места удаленных пользователей. При этом ввод и вывод данных с единого сервера телемеханики на различные уровни иерархии телемеханической системы осуществляется с использованием каналов связи Internet, что также является принципиальным отличием способа и реализующей его телемеханической системы.
Использование контроллеров телеуправления, преобразующих данные с контролируемых объектов в IP-пакеты, с последующей передачей по GSM GPRS-каналу на единый сервер телемеханики со статическим IP-адресом, на котором установлен комплекс серверных программных средств с подпрограммой приемопередачи и подпрограммой их визуализации, позволяет осуществить прямой доступ информации от удаленных объектов контроля и управления на общедоступный выделенный Internet-сервер. При этом совмещение программно-аппаратных функций приемопередачи, обработки, визуализации и хранения данных на едином выделенном Internet-сервере телемеханики обеспечивает компактность и функциональность архитектуры. В то же время использование SCADA подразумевает размещение ее на нескольких программно-аппаратных серверах, требует существенных вычислительных ресурсов, компонуется из множества программных модулей, что, в итоге, обуславливает ее громоздкость, подверженность ошибкам и сбоям, относительно медленное выполнение функций, при относительно высокой стоимости соответствующих компонентов и лицензий.
Обмен данными по GSM GPRS-каналам соответствует требованиям, предъявляемым к автоматизированным системам, таким как достоверность, надежность, качество передачи данных. Это позволяет производить мониторинг распределенных (удаленных) объектов и своевременно формировать управляющие сигналы.
Комплекс серверных программных средств, состоящий из подпрограммы приемопередачи и подпрограммы визуализации, обработки и хранения данных, выполняет функции громоздкой и дорогостоящей SCADA и позволяет исключить ее из проекта. При этом он реализован средствами Web-программирования и обладает гораздо более оптимальными показателями по комплексному критерию «функциональность - программно-аппаратные затраты - производительность».
Удаленный доступ к данным и формирование управляющих команд на удаленные объекты контроля и управления в телемеханической системе реализован на основе классификации имен пользователей (login) и применения системы паролей (password).
Технико-экономическое преимущество предлагаемого подхода заключается в том, что реализация системы как готового программно-аппаратного решения для увеличения количества автоматизированных рабочих мест удаленных пользователей и расширения количества логинов и паролей доступа к системе не требует дополнительного приобретения лицензий. Таким образом, доступ к данным становится неограниченным.
Настоящий способ и реализующая его система позволяют получить эффективное средство мониторинга и управления удаленными объектами, работающими в режиме реального времени, при сокращении времени и затрат на разработку телемеханической системы, оптимизации ее работы.
В итоге, использование предлагаемого способа и телемеханической системы для его осуществления позволяют создавать надежные системы с неограниченным количеством точек регламентируемого доступа к информации.
Предлагаемый способ и реализующая его телемеханическая система контроля и управления могут быть применены для мониторинга и управления различными удаленными объектами: станциями катодной защиты, газорегуляторными пунктами, магистральными трубопроводами, объектами энергетики.
Источники информации
1. Патент РФ №30207, МПК (7) G08B 13/22, 18.02.2003.
2. Патент РФ №2304740, МПК (7) F17D 5/00, 06.04.2005.
3. Рекламный проспект ООО «Элтех». Комплекс GSM мониторинга станций катодной защиты Тверца 900 «Тверца монитор».
4. Патент РФ №62722, МПК (8) G07C 11/00, 07.02.2007.
5. Патент РФ №29594, МПК (7) G05B 19/00, 25.11.2002.
6. Рекламный проспект ООО НПП «Сфера». Программно-технический комплекс «СКАТ - 4».
7. Рекламный проспект ООО «Аналитика». Телеизмерение, телесигнализация и телеуправление на объектах электрических сетей.
8. Патент РФ №66550, МПК (8) G01R 22/00, 16.04.2007.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ телемеханического контроля и управления удаленными объектами | 2016 |
|
RU2642365C1 |
| ТЕЛЕМЕХАНИЧЕСКАЯ СИСТЕМА КОНТРОЛЯ И УПРАВЛЕНИЯ УСТАНОВКАМИ КАТОДНОЙ ЗАЩИТЫ МАГИСТРАЛЬНЫХ ГАЗОПРОВОДОВ | 2013 |
|
RU2540847C2 |
| УСТРОЙСТВО ДЛЯ УДАЛЕННОГО МОНИТОРИНГА И АНАЛИЗА РАБОТЫ ТЕХНИЧЕСКИХ СРЕДСТВ ПЕРЕДВИЖНОГО ВЫСТАВОЧНО-ЛЕКЦИОННОГО КОМПЛЕКСА | 2013 |
|
RU2554524C1 |
| Устройство для контроля работы станка-качалки | 2024 |
|
RU2832388C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА МОНИТОРИНГА ЭЛЕКТРОСЕТИ ПЕРЕДВИЖНОГО ВЫСТАВОЧНО-ЛЕКЦИОННОГО КОМПЛЕКСА | 2015 |
|
RU2578269C1 |
| СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ МОБИЛЬНЫХ КОНТРОЛИРУЕМЫХ ОБЪЕКТОВ | 2019 |
|
RU2721370C1 |
| Система для управления устройствами электроснабжения объектов телемеханики на железнодорожном транспорте | 2017 |
|
RU2666467C1 |
| СПОСОБ ДИСТАНЦИОННОГО КОНТРОЛЯ БЕЗОПАСНОСТИ СОВЕРШЕНИЯ ОПЕРАТИВНЫХ ДЕЙСТВИЙ НА ЭЛЕКТРОУСТАНОВКЕ И ПРОГРАММНО-АППАРАТНЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2732484C2 |
| ЕДИНАЯ СИСТЕМА УПРАВЛЕНИЯ ТРУБОПРОВОДНОЙ СИСТЕМОЙ "ВОСТОЧНАЯ СИБИРЬ - ТИХИЙ ОКЕАН - II" (ЕСУ ТС "ВСТО-II") | 2013 |
|
RU2551787C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО КОНТРОЛЯ КОТЕЛЬНОЙ | 2017 |
|
RU2656670C1 |
Изобретение относится к средствам телемеханического контроля и управления объектами. Технический результат заключается в повышении быстродействия системы телемеханики. На каждый удаленный объект устанавливают контроллеры телеуправления, в центре сбора и обработки данных устанавливают INTERNET-сервер с выделенным статическим IP-адресом и сервер телемеханики, с помощью применения контроллеров телеуправления собирают массивы данных и выдают команды управления на исполнительные механизмы удаленных объектов, для приемопередачи данных с единого сервера телемеханики на контроллеры телеуправления используют оригинальный протокол на основе стека TCP/IP сервиса GPRS сотовой связи GSM. Для просмотра полученной информации используют автоматизированные рабочие места, при этом сформированные с помощью контроллеров телеуправления TCP/IP-пакеты с данными передают на единый сервер телемеханики, выполненный на INTERNET-сервере со статическим IP-адресом. На едином сервере телемеханики устанавливают программные средства для обеспечения приемопередачи, визуализации, обработки и хранения данных, просмотр данных об удаленных объектах и выдачу команд управления организуют при использовании стандартных WEB-браузеров с заданием IP-адреса сервера телемеханики. 2 н. и 2 з.п. ф-лы, 1 ил.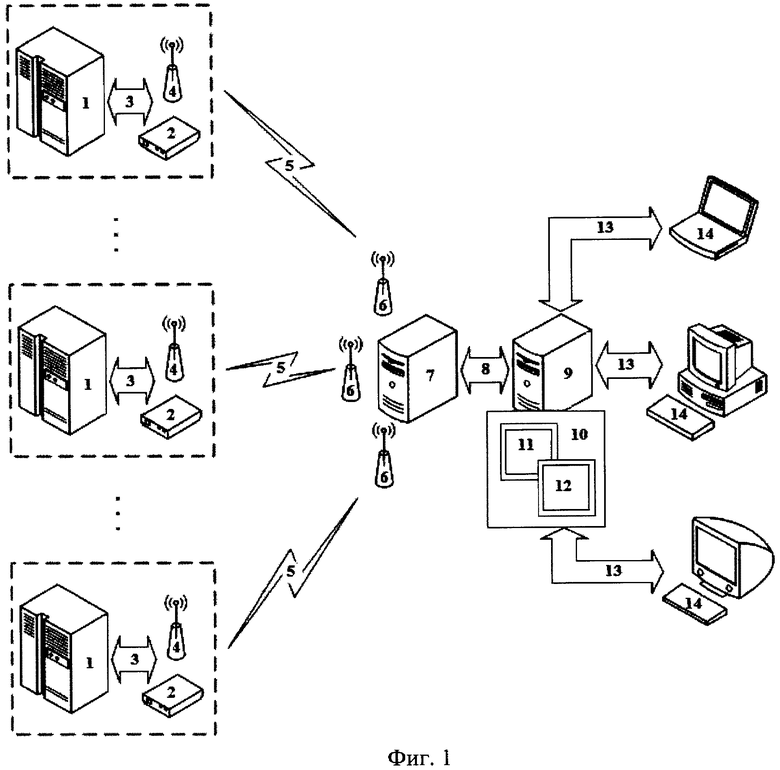
1. Способ телемеханического контроля и управления удаленными объектами, включающий установку на удаленных объектах контроллеров телеуправления, применение каналов связи, установку в центре сбора и обработки данных выделенного Internet-сервера со статическим IP-адресом и сервера сбора, обработки данных, сбор массивов первичных данных и выдачу управляющих команд на исполнительные механизмы удаленных объектов посредством контроллеров телеуправления, приемопередачу данных с использованием программного протокола на основе стека TCP/IP сервиса GPRS сотовой связи GSM, обработку данных с применением средств программного обеспечения, визуализацию, хранение, реализацию доступа к данным, а также использование автоматизированных рабочих мест, отличающийся тем, что сформированные с помощью контроллеров телеуправления TCP/IP-пакеты с данными передают на сервер сбора и обработки данных, который функционально совмещают с выделенным Internet-сервером со статическим IP-адресом на одной программно-аппаратной платформе с получением единого сервера телемеханики, на едином сервере телемеханики устанавливают комплекс серверных программных средств для обеспечения приемопередачи, визуализации, обработки и хранения данных, при этом просмотр данных об удаленных объектах и выдачу команд управления организуют при использовании стандартных Web-браузеров с заданием IP-адреса единого сервера телемеханики.
2. Способ телемеханического контроля и управления по п.1, отличающийся тем, что с помощью единого сервера телемеханики, реализованного на единой программно-аппаратной платформе, одновременно осуществляют как ввод/вывод данных с контроллеров телеуправления, так и обработку, приемопередачу данных на автоматизированные рабочие места, при этом приемопередачу между единым сервером телемеханики, удаленными контроллерами телеуправления и автоматизированными рабочими местами осуществляют по каналам связи, представляющим собой линии Internet, доступ к данным и защиту реализуют в порядке классификации имен пользователей (login) и системы паролей (password).
3. Телемеханическая система контроля и управления удаленными объектами, содержащая удаленные объекты, контроллеры телеуправления с интегрированными модемами GSM GPRS, каналы периферийной связи, антенно-фидерные устройства контроллеров телеуправления, GSM GPRS- каналы приемопередачи данных с использованием программного протокола на основе стека TCP/IP, антенно-фидерные устройства мобильного оператора, GSM GPRS-сервер мобильного оператора связи, сервер сбора данных и управления, выделенный Internet-сервер со статическим IP-адресом, автоматизированные рабочие места, отличающаяся тем, что в ее состав также входят комплекс серверных программных средств, Internet-канал связи, обеспечивающий обмен данными между GSM GPRS сервером мобильного оператора связи, сервером сбора данных и управления и автоматизированными рабочими местами, при этом:
сервер сбора данных и управления функционально совмещен с выделенным Internet-сервером со статическим IP-адресом, с получением единого сервера телемеханики;
комплекс серверных программных средств установлен на едином сервере телемеханики и реализован средствами Web-программирования;
комплекс серверных программных средств состоит из подпрограммы приемопередачи и подпрограммы визуализации, обработки, хранения данных.
4. Телемеханическая система контроля и управления по п.3, отличающаяся тем, что единый сервер телемеханики программно-аппаратно совмещает в себе функции приемопередачи данных с удаленных контроллеров телеуправления на автоматизированные рабочие места удаленных пользователей, при этом система в целом обеспечивает неограниченное количество точек регламентируемого доступа к информации об удаленных объектах, при использовании стандартных Web-браузеров с заданием IP-адреса единого сервера телемеханики, применения системы имен пользователей (login) и паролей (password).
| Устройство для осуществления электрической зависимости между выходным семафором местного управления и блок-аппаратом путевой блокировки | 1944 |
|
SU66550A1 |
| Интернет-демонстрация удаленного управления технологическим процессом через web и с мобильных телефонов, 05.03.2008, [он-лайн], [найдено 18.07.2011], найдено в Интернет: <URL:http://web.archive.org/web/20080305192532/http://www.adastra.ru/product/runtime/scada/DataCenter/webscada/> | |||
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| СПОСОБ ПЕРЕДАЧИ ТЕЛЕМЕХАНИЧЕСКОЙ ИНФОРМАЦИИ ОТ НЕСКОЛЬКИХ КОНТРОЛЬНЫХ ПУНКТОВ ПО ОБЩЕМУ ФИЗИЧЕСКОМУ КАНАЛУ СВЯЗИ | 2005 |
|
RU2342774C2 |
| Электрический нагревательный прибор | 1930 |
|
SU20164A1 |

