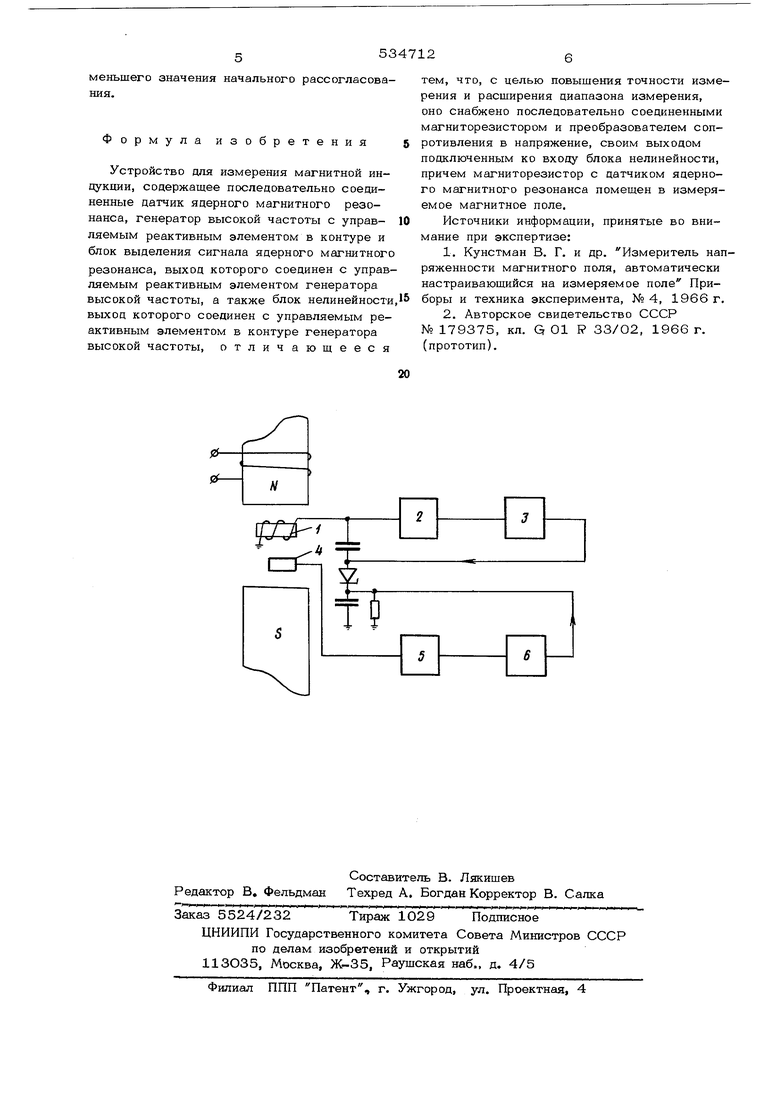
(54) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНОЙ ИНДУКЦИИ высокой частоты с управляемым реактивным элементом в контуре блока 3 выделения сигнала ядерного магнитного резонанса с цепью автопоцстройки частоты, магнитореаистора 4, преобразователя 5 сопротивления в напряжение и блока 6 нелинейности. В исследуемое магнитное поле NS помещен датчик 1 ядерного магнитного резонанса, соединенный с контуром генератора 2 высокой частоты. При совпадении частот прецессии ядер вещества датчика 1 с часто той генератора 2 высокой частоты появляет ся сигнал ЯМР, который поступает от генератора 2 на блок 3 выделения сигнала ЯМР В блоке 3 производится обработка сигнала, т. е. улучшение отношения сигнал-шум, формирование фронтов и амплитуды сигнала, по лучение напряжения, пропорционального рассогласованию частоты прецессии и частоты генератора. Последнее напряжение подается на управляемый элемент контура генератора 2 и подстраивает его частоту в сторону уменьшения рассогласования частот. Одиовр менно на управляемый элемент генератора 2 воздействует напряжение от датчика - маг- ниторезистора 4, помещенного совместно с датчиком 1 ЯМР в измеряемое магнитное поле. Сопротивление магниторезистора изменяется лод влиянием измеряемой магнитной индукции. Магниторезистор соединен с преобразователем 5, который преобразует изменение сопротивления магниторезистора 4 в напряжение, величина которого зависит от значения измеряемой магнитной индукции. Напряжение с выхода преобразователя 5 пос тупает на вход блока 6 нелинейности и с выхода последнего на управляемый реактивный элемент генератора 2 высокой частоты, подстраивая частоту высокочастотного генератора. При изменении ин.дукции магнитного поля генератор 2 высокой частоты продолжает следить за частотой прецессии по двум цепям: первая цепь- блок 3 выделения сигнала ЯМР с цепью автоподстройки частоты и вторая цепь-магниторезистор4 преобразователь 5, блок 6 нелинейности. Применение цепи слежения с магниторезисто ром облегчает работу первой цепи автоподстройки частоты, расширяет полосу удержания и снижает погрешность статизма, так как на долю первой цепи АПЧ остается отработка меньшего рассогласования. В случае отсутствия сигнала ЯМР в начальный момент частота генератора 2 приводится к частоте прецессии по цепи: Магниторезистор 4, преобразователь 5, блок 6 нелинейности, управляемый элемент генератора 2. Блок 6 нелинейности позволяет скорректировать нелинейность зависимости частоты высокочастотного генератора 2 от значения магнитной индукции, т. е. увеличить точность грубой подстройки частоты генератора за счет магниторезистора. При правильном согласовании частоты высокочастотного генератора 2, определяемой Maj ниторезистором, с величиной магнитной индукции, частота генератора попадает в зону захвата, и первая цепь АПЧ подстраивает частоту генератора к частоте прецессии ядер вещества. В связи с тем, что магниторезистор принудительно приводит частоту генератора в зону захвата системы, помехозащищенность системы резко возрастает. Применение магниторезистора позволяет значительно упростить блок нелинейности, а в некоторых случаях исключить его из схемы. Это объясняется следующим. Частота генератора 2 с управляемым реактивным элементом в контуре (например, варикапомJ, ориентировочно пропорциональна управляющему напряжению в степени одна четвертая, напряжение, снимаемое с преобразователя 5, пропорционально квадрату измеряемой магнитной индукции. Таким образом, блок нелинейности должен моделировать функцию напряжения в степени два вместо четырех при применении преобразователя Холла. При необходимости слежения в узком диапазоне можно осуществить непосредственное соединение магниторезистора 4 через преобразователь 5 с управляемым реактивным элементом контура генератора 2 высокой частоты. При этом точность грубой подстройки частоты будет выще,чем в случае применения преобразователя Холла, что объясняется характеристиками магниторезистора. Полоса захвата и слежения прибора будет выше, чем с преобразователем Холла, но ниже, чем в случае применения блока нелинейности. Таким образом, применение магниторезистора в поиско-следящей системе позволяет повысить помехозащищенность прибора из-за наличия принудительного приведения частоты генератора в зону захвата. Блок нелинейности позволяет расширить функциональные возможности системы, а именно расширить .полосу захвата и удержания. Применение магниторезистора вместо преобразователя Холла позволяет упростить блок нелинейности, а при малом необходимом диапазоне работы имеется возможность обойтись без блока нелинейности. Применение цепи поиска и слежения с магниторезистором позволяет снизить ошибку статизма, расширить полосу удержания в связи с тем,что на долю устройства выделения сигнала ЯМР с цепью автоподстройки остается отработка меньшего значения начального рассогласования. Формула изобретения Устройство для измерения магнитной индукции, содержащее последовательно соединенные датчик ядерного магнитного резонанса, генератор высокой частоты с управляемым реактивным элементом в контуре и блок выделения сигнала ядерного магнитного резонанса, выход которого соединен с управляемым реактивным элементом генератора высокой частоты, а также блок нелинейности выход которого соединен с управляемым реактивным элементом в контуре генератора высокой частоты, отличающееся тем, что, с целью повышения точности измерения и расширения диапазона измерения, оно снабжено последовательно соединенными магниторезистором и преобразователем сопротивления в напряжение, своим выходом подключенным ко входу блока нелинейности, причем магниторезистор с датчиком ядерного магнитного резонанса помещен в измеряемое магнитное поле. Источники информации, принятые во внимание при экспертизе: 1. Кунстман В. Г. и др. Измеритель напряженности магнитного поля, автоматически настраивающийся на измеряемое поле Приборы и техника эксперимента, № 4, 1966 г, 2. Авторское свидетельство СССР ° 179375, кл. Q 01 I 33/02, 1966 г. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ поиска зоны резонанса в спиновых детекторах | 1989 |
|
SU1711106A1 |
| Автоматический тесламетр | 1975 |
|
SU534715A1 |
| Стабилизатор магнитного поля | 1988 |
|
SU1631534A1 |
| Магнитометр | 1982 |
|
SU1033996A1 |
| Устройство для измерения индукции магнитного поля | 1980 |
|
SU883819A1 |
| Ядерно-прецессионный магнитометр | 1980 |
|
SU894653A1 |
| Измерительный преобразователь тока в частоту | 1973 |
|
SU615424A1 |
| Измеритель постоянного тока | 1979 |
|
SU849086A1 |
| Устройство для измерения градиента индукции магнитного поля | 1986 |
|
SU1322210A1 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЙ ПО МЕТОДУ ЯДЕРНОГО МАГНИТНОГО ИЛИ ЭЛЕКТРОННОГО ПАРАМАГНИТНОГОРЕЗОНАНСА | 1966 |
|
SU179375A1 |
вяялтт
