Фиг. 1
Изобретение относится к электротехнике, в частности к устройствам для измерения магнитной индукции и устройствам для создания магнитных полей с точно заданным значением магнитной индукции.
Цель изобретения - повышение стабильности магнитного поля путем исключения влияния дестабилизирующих факторов на частоту автодина.
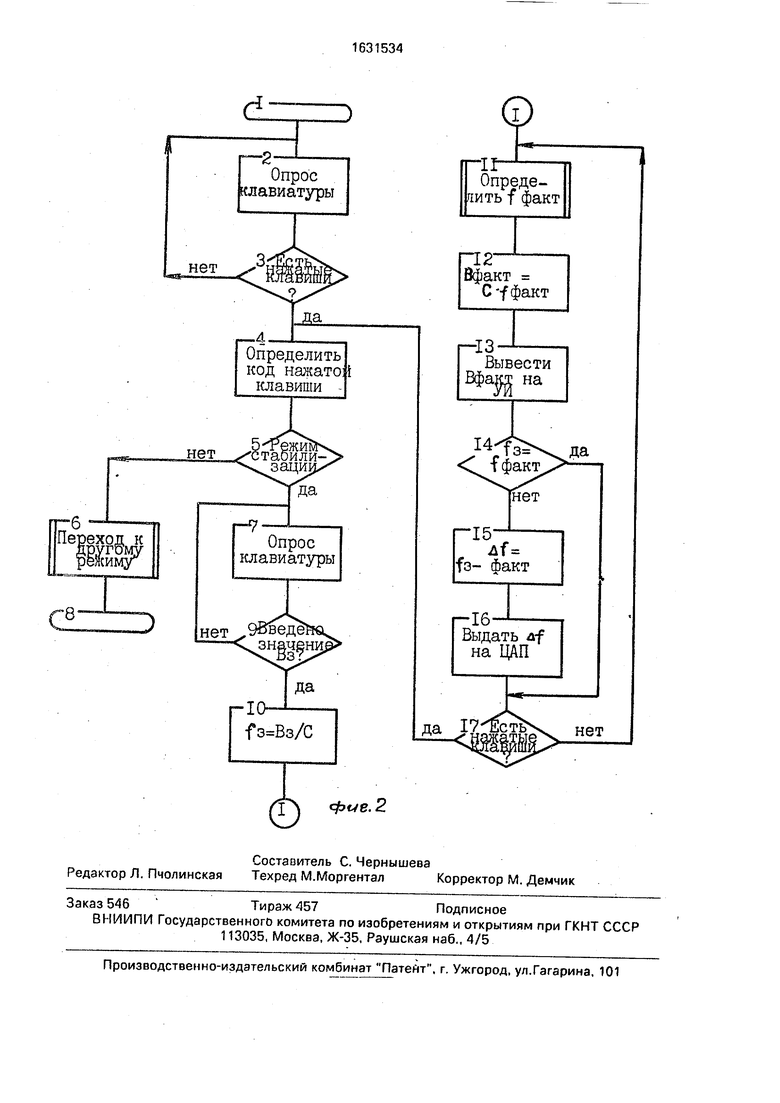
На фиг. 1 представлена структурная схема стабилизатора магнитного поля; на фиг. 2 - алгоритм работы петли авторегулирования.
Устройство содержит электромагнит 1, преобразователь 2 ядерного магнитного ре- эопансз (ЯМР), цифровой измеритель 3 частоты, источник 4тока модуляции, автодин 5, блок б сопряжения, амплитудный детектор 7, узел 8 индикации, цифроаналоговый преобразователь (ЦАП) 9, клавишный пульт 10, усилитель 11 низкой частоты, фазовый де- гектор 12 и регулируемый источник 13 питания электромагнита.
Электромагнит снабжен катушками 14.
Принцип действия стабилизатора маг- пит кого поля основан на явлении ЯМР. Если диамагнитное вещество , ядра которого имеют магнитные дипольные моменты, поместить в постоянное магнитное поле электромагнита 1 с напряженностью Н, то диполи начинают прецессировать вокруг направления приложенного поля.
Частота прецессии определяется формулой Лармора:
(о-уИ ,(1)
где со- круговая частота прецессии,
у - гиромагнитное отношение ядра .
Основной элемент, необходимый для обнаружения частоты прецессии магнитных диполей, - преобразователь ЯМР. В его состав выходит ампула с диамагнитным веществом, помещенная в катушку индуктивности, которая является частью контура автодина 5. Частоту колебаний автодина можно изменять с помощью конденсатора переменной емко- сти, являющеюся частью контура этого генератора. В тот момент, когда частота автодина становится равной частоте прецессии ядер, наступает явление резонанса, проявляющееся в поглощении энергии высокочастотного магнитного поля ядрами рабочего вещества. Это поглащение анергии приводит к уменьшению пеличмны добротности катушки и, следовательно, к уменьшению сопротивления кон , ра генератора, что вызывает уменьше- ние амплитуды генерируемых колебаний.
Для того, чтобы сделать явление резонанса повторяющимся и пригодным для ий- блюдемия в приборе осуществляется модуляция магнитного поля напряжением переменного тока частотой 50 Гц с помощью источника 4 тока модуляции, питающего напряжением частотой 50 Гц катушку модуляции преобразователя ЯМР. Таким образом, условия ЯМР возникают дважды за период модулирующего напряжения.
Периодические изменения амплитуды генерируемых колебаний преобразуются с помощью амплитудного детектора 7 в низкочастотный сигнал переменного тока - сигнал ЯМР. В условиях ЯМР магнитную индукцию определяют по формуле:
о 2я, гх В - -y-fp - С Тр
(2)
где fp - частота колебаний автодина, при которой наступает резонанс ядер,
С - константа, зависящая от рабочего вещества в преобразователе ЯМР .
С помощью петли авторегулирования тока обмотки электромагнита поддерживается стабильное значение магнитной индукции в зазоре электромагнита. Это осуществляется следующим образом. На фазовом детекторе 12 происходит сравнение фаз сигнала ЯМР, усиленного для детектирования усилителем 11 низкой частоты, и сигнала от источника 4 тока модуляции. На выходе фазового детектора вырабатывается сигнал ошибки, который имеет нулевое значение при резонансных условиях и фиксируется на миллиамперметре, установленном на выходе фазового детектора. При изменении поля электромагнита нарушается выполнение условия (2) и на выходе фазового детектора возникает сигнал ошибки, пропорциональный отклонению поля электромагнита.
Сигнал ошибки поступает с фазового детектора на регулируемый источник питания 13 электромагнита, с помощью которого корректируется величина тока в обмотке 14 электромагнита 1 до тех пор, пока прежнее значение магнитной индукции не восстанавливается.
Однако для поддержания стабильного магнитного поля в зазоре электромагнита авторегулирования тока электромагнита еще недостаточно, так как нестабильность поля может возникать из -за флюктуации частоты автодина. Для устранения этого недостатка введена дополнительная петля авторегулирования, с помощью которой поддерживается постоянная стабильная резонансная частота автодина. С выхода автодина высокочастотные колебания поступают на вход цифрового измерителя 3 частоты, с помощью которого определяется значение частоты колебаний и вычисляется значение магнитной индукции по формуле (2), Через устройство 6 сопряжения измеритель 3 выдает информацию о значении магнитной индукции на узел 8 индикации.
В приборе выбран динамический способ индикации (более экономичный, чем статический). По одному каналу передается номер индикатора, а по другому - двоично- десятичный код этого разряда результата, причем передача информации осуществляется последовательно на все разряды инди- катора, а непрерывность восприятия обеспечивается инерцией глаза и послесвечением индикатора.
Таким образом, оператор контролирует значение магнитной индукции. Для обеспе- чения стабильности измеренного магнитного поля оператор с помощью пульта 10 должен выбрать для работы Режим стабилизации. Далее в соответствии с алгоритмом работы дополнительной петли авторегулирования, представленным на фиг. 2, оператор с клавишного пульта 10 заносит в систему заданное значение стабилизируемой магнитной индукции Вз.
Работа клавишного пульта, представля- ющего собой матрицу, на пересечении строк и столбцов которой расположены клавиши, организована следующим образом.
Для определения кода нажатой клавиши измеритель 3 через блок 6 сопряжения выдает на строки матрицы сканирующий сигнал и принимает сигналы со столбцов матрицы. Низкий логический уровень сигнала с соответствующей строки поступает на одну из линий столбцов, если клавиша на их пересечении замкнута, что и позволяет однозначно определить код нажатой клавиши.
Таким образом, заданное значение магнитной индукции Вз и соответствующее ему значение резонансной частоты fa запомина- ется в ОЗУ, входящем в состав измерителя 3. Далее в процессе работы измеритель 3 не только выдает фактическое значение магнитной индукции на индикацию, но и при каждом измерении вычисляет разность между заданным fa и фактическим . значениями частоты. Величина отклонения ча- CTOTbiAf в виде цифрового 12 - разрядного кода поступает через блок б на ЦАП 9, аналоговый сигнал с выхода которого передае тся на управляемый (исполнительный)
элемент автодина, роль которого может выполнять, например.варикап. Коррекция частоты автодина производится с заданной точностью до тех пор, пока частота автодина не станет равной заданному стабилизируемому значению.
Формула изобретения Стабилизатор магнитного поля, содержащий электромагнит, преобразователь ядерного магнитного резонанса, расположенный в поле электромагнита, источник тока модуляции, один выход которого соединен с входом преобразователя ядерного магнитного резонанса, выход которого подключен к первому входу автодина, первый выход которого соединен с входом амплитудного детектора, цифроаналоговый преобразователь, фазовый детектор и регулируемый источник питания, выход которого соединен с обмотками электромагнита, отличающийся тем, что, с целью повышения стабильности магнитного поля путем исключения влияния дестабилизирующих факторов на частоту автодина, в него введены цифровой измеритель частоты, блок сопряжения, узел индикации, клавишный пульт, усилитель низкой частоты, причем выход амплитудного детектора через усилитель низкой частоты подключен к одному входу фазового детектора, другой вход которого соединен с другим выходом источника тока модуляции, а выход фазового детектора подключен к управляющему входу регулируемого источника питания, при этом второй выход автодина соединен с входом измерителя частоты, выходные выводы которого подключены к соответствующим входам блока сопряжения, выходные выводы которого соединены с входами узла индикации, цифроаналогового преобразователя и клавишного пульта соответственно, выход цифроаналогового преобразователя подключен к второму входу автодина , а выход кла - вишного пульта соединен с соответствующим входом блока сопряжения, при этом цифровой измеритель частоты, блок сопряжения, цифроаналоговый преобразрватель, узел индикации и клавишный пульт образуют петлю авто регулирования, функции которой определены алгоритмом, изображенном на фиг. 2.
d.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления полем электромагнита | 1975 |
|
SU553606A1 |
| Измеритель магнитной индукции | 1974 |
|
SU495600A1 |
| Способ измерения магнитного поля и устройство для его осуществления | 1980 |
|
SU890184A1 |
| Магнитометр | 1979 |
|
SU813343A1 |
| СПЕКТРСЛ1ЕТР .АКУСТИЧЕСКОГО ЯДЕРНОГО Л1\ГНИТНОГО | 1973 |
|
SU381018A1 |
| Контроллер магнитного поля | 2023 |
|
RU2799103C1 |
| СПОСОБ КОЛИЧЕСТВЕННОГО ОПРЕДЕЛЕНИЯ АДСОРБЦИОННОЙ СПОСОБНОСТИ ЦЕОЛИТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2087904C1 |
| Магнитометр | 1982 |
|
SU1033996A1 |
| Измеритель постоянного тока | 1979 |
|
SU849086A1 |
| Способ измерения времени продольной релаксации Т1 текущей жидкости методом ядерного магнитного резонанса | 2020 |
|
RU2740181C1 |
Изобретение относится к устройствам создания магнитных полей с точно заданным значением магнитной индукции. Целью изобретения является повышение стабильности магнитного поля путем исключения влияния дестабилизирующих факторов на частоту автодина. Цель достигается за счет введения в схему цифрового измерителя 3 частоты, блока 6 сопряжения, узла 8 индикации и клавишного пульта 10. Эти элементы вместе с введенным цифроаналоговым преобразователем 9 образуют петлю динамического авторегулирования на программном уровне резонансной частоты автодина. Благодаря этому обеспечивается непосредственное изменение частоты автодина с любой заданной точностью. 2 ил.
Опрос клавиатуры
.А
Определить
код нажато:
клавиши
нет
Опрос клавиатуры
фие.2
-II- Опреде- пить f факт
П2 Вфакт С-f факт
i
-13
Вывести на
-15
f Afs
тз- факт
-16- Выдать л-f на ЦАП
| Устройство для создания стабильного магнитного поля заданной напряженности | 1983 |
|
SU1151939A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для управления полем электромагнита | 1975 |
|
SU553606A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Шеститрубный элемент пароперегревателя в жаровых трубках | 1918 |
|
SU1977A1 |
