Изобретение относится к измерительной технике и может быть использовано при измерении велргчины индукции ыеоднородного постоянного магнит- него поля, а также при измерении ве- личины ее градиента.
Цель изобретения - повышение точности при измерении неоднородных магнитных полей и градиентов с помощью одного датчика перемещаемого в прост- ранстве.
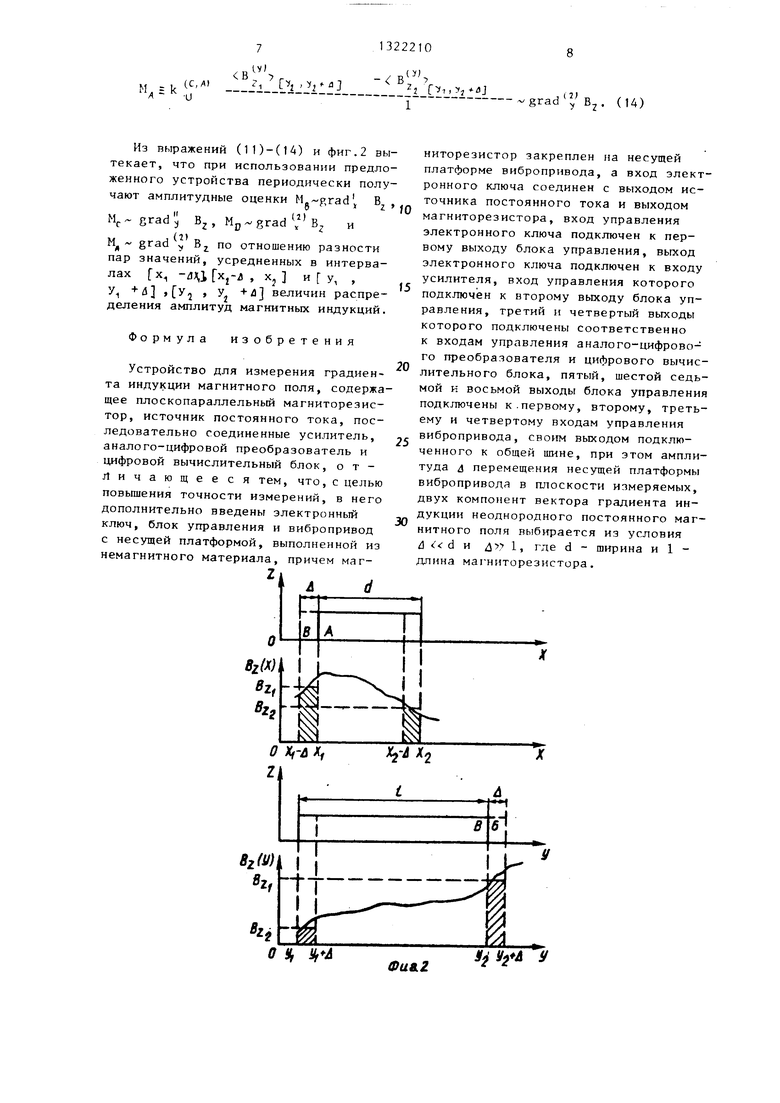
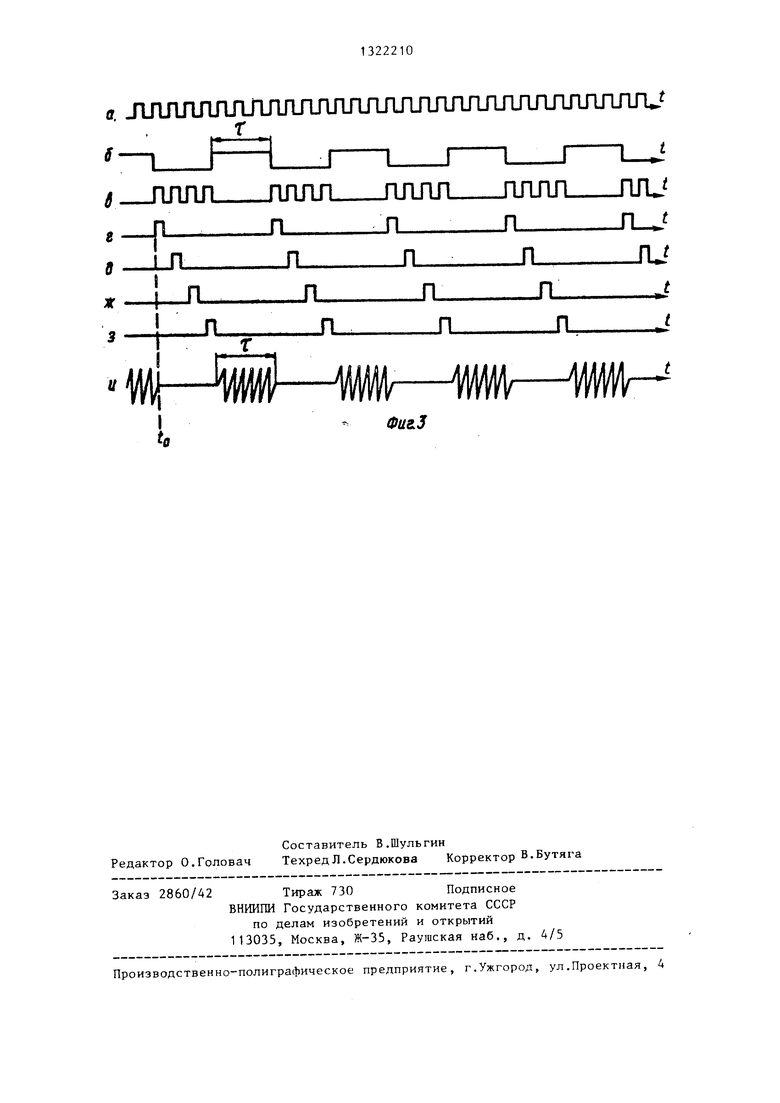
На фиг.1 представлена структурная схема устройства; на фиг.2 и 3 - диаграммы, поясняющие работу устройства
Устройство содержит плоскопарал- лельный магниточувствительный элемент 1, например магниторезистор или датчик Холла, шириной d и длиной 1, вибропривод 2 с несущей платформой 3, источник 4 постоянного тока, элект- ронный ключ 5, блок 6 управления, содержащий, например, два демультиплек- сора 6.1 и 6.2, фазовращатель 6.3, формирователь 6.4 адреса, электронный ключ 6.5, генератор 6.6 синусоидаль- ных колебаний, импульсный генератор 6.7 с измеряемой длительностью и частотой следования прямоугольных импульсов, распределитель 6.8 импульсов электронный ключ 6.9, импульсный ге- нератор 6.10 тактовой частоты, усилитель 7, аналого-цифровой преобразователь 8 и цифровой вычислительный блок 9, выход которого является выходом устройства.
Магниточувствительный элемент 1 закреплен на несущей платформе 3 вибропривода 2. Вход первого электронного ключа 5 соединен с выходом источника 4 постоянного тока и выходом магниточувствительного элемента 1. Вход управления первого электронного ключа 5 подключен к первому выходу блока 6 управления, выход первого электронного ключа 5 подключен к вхо- ду вычислительного блока 9 через усилитель 7 и аналого-цифровой преобразователь 8, вход управления усилителя
7подключен к второму выходу блока 6 управления, третий и четвертый выходы которого подключены к входам управления аналого-цифрового преобразователя
8и цфрового вычислительного блока 9, пятый, шестой, седьмой и восьмой выходы блока 6 управления подключены к первому, второму, третьему и четвертому управляющим входам вибропривода
2, выход которого подключен к общей шине.
,
|0
.
(5 20 , 30 35
4045
50
55
222102
Устройство работает следующим образом.
Сигнал от генератора 6.6 синусоидальных колебаний блока 6 управления поступает на вход второго электронного ключа 6.5, управляемого импульсным генератором 6.7 с изменяемой длительностью и частотой следования импульсов. При поступлении импульсов длительностью Г (фиг.З ) на управляющий вход электронного ключа 6. 5 он открывается и пропускает пачку питания синусоидальных импульсов пьезокера- мических элементов вибропривода 2 (фиг.Зи). Сформированная пачка сигналов питания пьезокерамических элементов длительностью t обусловливает величину амплитуды j перемещения несущей платформы 3 вибропривода 2 в плоскости измеряемых двух компонент вектора градиента индукции магнитного поля. Одновременно сформированная пачка поступает на информационный вход второго демультиплексора 6.2 и на фазовращатель 6.3. С выхода фазовращателя 6,3 сигнал, сдвинутый по фазе на 90, поступает на информационный вход первого демультиплексора 6.1 .
Питание пьезокерамических элементов переменным напряжением со сдвигом по фазе для каждого из пьезоэлементов необходимо для возбуждения продольных бегущих волн в пьезокерамических элементах вибропривода 2, при взаимодействии с которыми несущая платформа 3 вибпропривода 2 перемещается по координатам X и У. Реверсирование достигается путем изменения направления распределения волн, т.е. путем измерения подключения фаз источника питания к пьезокерамическим элементам.
С импульсного генератора 6.7 последовательность импульсов одновременно поступает на третий электронный ключ 6.9 и на формирователь 6.4 адреса, на выходе которого после поступления первого, второго, третьего, четвертого импульсов, длительностью Т, соответственно формируются коды адреса 00, 01, 10, 11, которые повторяются через каждые четыре такта.
При поступлении с выхода формирователя 6.4 адреса на адресную шину первого 6.1 и второго 6.2 демульти- плексоров кодов адреса 00, 01, 10, 11 демультиплексоры соединяют информационный вход соответственно с пер313
вым, вторым, третьим и четвертым своими выходами. Выходы первого 6.1 и второго 6.2 демультиплексоров соединены между собой так, что питающие напряжения пьезокерамических элемен- тов вибропривода 2 U, U sin tot и Uj (wc S (фиг.О на пятый, шестой, седьмой и восьмой выходы блока 6 управления поступают в следующей последовательности: на пятый - седь- мой, на шестой - восьмой, на седьмой пятый, на восьмой - шестой, что соответствует перемещению несущей платформы 3 вибропривода 2 по траекториям А В, , , D-А (фиг.1), в промежутках импульсов длительностью с открывается третий электронный ключ 6.9, пропускающий тактовые импульсы (фиг.Зб), поступающие от импульсного генератора 6.10 тактовой частоты на распределитель 6.8 импульсов, с выходов которого импульсы подаются на первый, второй, третий и четвертый выходы блока 6 упраления (фиг.3г,з, t, у) и поочередно управляют элект- ронным ключом 5, усилителем 7, аналого-цифровым преобразователем 8 и цифровым вычислительным устройством 9 (фиг.1) .
Длительность положительных импульсов t пропорциональна величине амплитуды и перемещения несущей платформы 3 вибропривода 2, т.е. Т d устанавливается согласно величине шага перемещения магниточувствительного элемента. Длительность всех остальных импульсов и период между ними устанавливают согласно условий достижения установившегося режима после окончания переходных процессов в соответст(Вующих цепях устройства.
Скорость перемещения магниточувствительного элемента 1 с несущей платформой 3 вибропривода 2 выбирается постоянной и зависит только от амплитуды синусоидальных колебаний, поступающих от генератора 6.6 синусоидальных колебаний.
К магниточувствительному элементу 1, например магниторезистору, пшриной d и длиной 1, расположенному в интервале х, Xj оси X и в интервале у,I У. оси Y системы координат XOY (фиг.1 и 2) и помещенном в неоднородное постоянное магнитное поле с век- торами индукции В (х) и В (у) и их градиентами grad,Bj, проложен постоянный ток, поступающий от источника 4 постоянного тока, и он
104
последовательно перемещается вместе с несущей платформой 3 вибропривода 2 по траектории (фиг.О.
В исходном состоянии в момент времени tg (фиг.З) магниточувствитель- ный элемент 1 с несущей платформой 3 вибропривода 2 (фиг.1) устанавливается в положении А в плоскости ХОУ оси координат. На выходе магниточувствительного элемента 1 формируется выходное напряжение
,c/t
Х7У,
В(х,у) dxdy с- , (1)
где k - чувствительность магниточувствительного элемента 1 , (В/Тл);
S - площадь магниточувствительного элемента 1, s d-1; В(х,у) - модуль индикации измеряемого неоднородного постоянного поля в плоскости ХОУ; (fl)
В J - средняя по площади s величина индукции В (х,у) в положении А;
х , X , у , у - координаты граней элемента 1 в положении А (фиг.2).
В положении В (фиг.) формируется выходпое напряжение
Х7-4 -ii f B,(:.r,y)dxdy .,, (2)
S J V
1 ( e)
где с В - средняя по площади S величина индукции В2(х,у) в положении В; 4 - амплитуда перемещения несущей платформы 3 вибропривода 2 в плоскости измеряемых двух компонент вектора градиента индукции магнитного поля.
В положении С формируется выходное напряжение
ij e и .:. в, (x,y)dx dy ,
ьы
гй 1,Л
,(С) 2
(3)
где В ., - средняя величина по площади s индукции В2(х,у) в положении С (фиг.1 и 2).
5 13222106
В положении D формируется выход-мжиС- (i)
и,- к .. йгаа X В-,.
ное напряжениев и d ь z
C.-4 f Г - Г.
I lS ()5 где 1/d - коэффициент передачи цифгде - средняя величина порового вычислительного бло площади 8 индукции, ка 9 в положениях А, В;
В, (х,у) в положении амплитуда градиента
(фиг.1)., индукции магнитного
(Л) .(В) пола.
Выходное напряжение Ug,, , bvx Во время нахождения магниточувсти еих , L Kl магниточувствительноговительного элемента 1 в положении С
элемента 1, прошедшее через первыйсвоей траектории движения
электронный ключ 5, усилитель 7 воj (jc) : В 1 - (i)
время нахождения его в фиксированных с и J В ,
положениях А, В, С, D, подается на(8)
аналого-цифровой преобразователь 8,где 1/1 - коэффициент передачи цифроКоэффициент передачи по напряже-вого вычислительного блока
нию усилителя 7 выбран из условия в20 9 в положениях А В;
положениях А, В, С, DВо время нахождения магниточувст1. (А, в) 1 (С,) 3 2 )вительного элемента 1 в положении D (( и д
. своей траектории движения
в положениях В, С; С, ,.
,ио ... .1 (е,«M,.k 5 -C«- - --5i2-- -.gradTB,.
«(9)
с помощью аналого-цифрового преоб- нахождения магниточувстразователя 8 сигналы преобразуются в ительного элемента 1 в положении А
цифровые и подаются в цифровой вы- траектории движения
числительный блок 9, работающий по30 д, .д,
алгоритму, реализующему следующие вы- .(С,Л) ij - 5jL2о -ан п
п. S. к ,1 . «- graa D, ,
ражения. JВо время нахождения магниточувст-(10)
вительного элемента 1 в положении ВИз вьфажений (О, (2) и (7) полусвоей траектории движениячают
,д(Х)
„ , k С.М . l b-VlllLiUl ilijliLiO - .grad ;; в, . (11)
6 U. j
Из выражений (2), (3) и (8) получают
/„lyls )
м.И .. .л111LilLb viiii.grad(; в,, ciz)
Из выражений (3), (4) и (9) получают
м,k , ±-AdLi..-...a.:IbJt:..o-,,,,„, „,,,
Из выражений (4), (1) и (19) по- лучают
М
-и
,
Из выражений (11)-(14) и фиг.2 вытекает, что при использовании предложенного устройства периодически получают амплитудные оценки М -grad, z
grad
В,
М.
grad J В,
i(. - ,c. ,) u, Г1 jj ;; 1. a I.. , иM grad Ч, Bj no отношению разности пар значений, усредненных в интервалах fx -ЛД,1 fxj- , Xj и у, , У +4 ,У , У +/1 величин распределения амплитуд магнитных индукций.
Формула изобретения
Устройство для измерения градиента индукции магнитного поля, содержащее плоскопараллельный магниторезис- тор, источник постоянного тока, последовательно соединенные усилитель, аналого-цифровой преобразователь и цифровой вычислительный блок, отличающееся тем, что, с целью повышения точности измерений, в него дополнительно введены электронный ключ, блок управления и вибропривод с несущей платформой, выполненной из немагнитного материала, причем маг
B S
2j ,
grad V В
Z
(14)
ниторезистор закреплен на несущей платформе вибропривода, а вход электронного ключа соединен с выходом источника постоянного тока и выходом магниторезистора, вход управления электронного ключа подключен к первому выходу блока управления, выход электронного ключа подключен к входу усилителя, вход управления которого подключен к второму выходу блока управления, третий и четвертый выходы которого подключены соответственно к входам управления аналого-цифрового преобразователя и цифрового вычислительного блока, пятый, шестой седьмой и восьмой выходы блока управления подключены к.первому, второму, третьему и четвертому входам управления вибропривода, своим выходом подключенного к общей шине, при этом амплитуда 4 перемещения несущей платформы виброприводя в плоскости измеряемых, двух компонент вектора градиента индукции неоднородного постоянного магнитного поля выб фается из условия : d и 4 1 где d - ширина и 1 - длина магниторезистора.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ УГЛА АЗИМУТА ГРУЗОПОДЪЕМНОГО КРАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2344370C1 |
| БОРТОВОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ МАГНИТНОГО ПОЛЯ ЗЕМЛИ | 2008 |
|
RU2368872C1 |
| Устройство для измерения индукции магнитного поля | 1988 |
|
SU1559322A1 |
| УСТРОЙСТВО ДЛЯ НЕРАЗРУШАЮЩЕЙ ДИФФЕРЕНЦИАЛЬНОЙ ВЕКТОРНОЙ ТРЕХМЕРНОЙ МАГНИТОСКОПИИ | 2013 |
|
RU2548405C1 |
| СТРОЧНЫЙ ПРЕОБРАЗОВАТЕЛЬ МАГНИТНЫХ ПОЛЕЙ | 1988 |
|
RU2006850C1 |
| СПОСОБ И УСТРОЙСТВО ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2012 |
|
RU2510500C1 |
| МАГНИТНЫЙ ОРТОГРАФ | 1995 |
|
RU2098808C1 |
| Магнитный дефектоскоп | 1988 |
|
SU1552083A1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА АЗИМУТА ГРУЗОПОДЪЕМНОГО КРАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2206869C2 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2530704C1 |
Изобретение может быть использовано при измерении величины индукции неоднородного постоянного магнитного поля, а также при измерении величины его градиента. Целью изобретения является повышение точности при измерении неоднородных магнитных по- лей и градиентов с помощью одного датчика, перемещаемого в пространстве. Для достижения этой цели в устройство дополнительно введены вибропровод 2 с несущей платформой 3, электронный ключ 5 и блок 6 управления. Устройство также содержит магниторе- зистор или датчик Холла 1, источник 4 постоянного тока, усилитель 7, аналого-цифровой преобразователь 8 и цифровой вычислительный блок 9. Блок управления 6 содержит мультиплексоры 6.1 и 6.2, фазовращатель 6.3, формирователь 6.4 адреса, электронный ключ 6,5, генератор 6,6 синусоидальных колебаний, импульсньт генератор 6,7, распределитель 6.8 импульсов, электронный ключ 6.9 и генератор 6,10 тактовой частоты, 3 ил. с $ (Л 00 tsD to to
5zW, г, BZ,
О -Л
Ц
в, (и)
о у,
Фи&2
i У
а, juuijirmjirLruinjmrmjijmn r
ff ПППППППП
ллля
R
Л1и fL
«H
Фи&У
| Протонный магнитометр-градиентометр | 1981 |
|
SU1027656A1 |
| Магнитометр | 1981 |
|
SU993178A1 |
