1
И-зобретение относится к уборочной технике и предназначено для использования в сельскохозяйственном производстве на уборке зерновых культур.
Известны автоматические регулировочгг ные устройства для режущего зернового комбайна, содержащие шарнирно связанный с колосоподъемником рычажный меха4низм, управляющий гидравлическим фиксаД тором, который поднимает или опускает режущий стол зерноуборочного комбайна.
Однако в таких устройствах возможны, случаи заклинивания колрсоподъе1ушиков, что неизбежно ведет к поломке устройстф исключается возможность установления необходимого зазора в механической пере даче. Кроме того, эти устройства cnoKHb по конструкции и ненадежны в работе.
Цель изобретения - упрощение конструкции, обеспечение надежности устройства в работе и устранение илерхшонности достигается тем, что колосотюдъемник выполнен в виде подпружиненной серьги и .снабжен логическим элементом и преобра-г зователем, выход которого подключен ко
входу логического элемента, а выход пос4леднего - к клапану управления гияра&лическим домкоатом, причем клапан yпpa& ления вьтолнен в виде постошшого трехточечного электрогидравлического серво- клапана.
, Кроме того, колосонодъемпик имеет : упругий хомут с пальцем для крепления ;к режущему столу, а тенвометрические ;преобразователи имеют предохранительный
10 ;листы. Причем, тензометрические преобразователи установлены на колосоподъемни «в ;между оежущим столом и упорным хомутом.
На фиг 1 схематически показано преД
5 лагаемое устройство; на фиг. 2 констр к дня и креплонне колосоподъемника; на фиг, 3 - крепление тензодйтчика на коло. соподъемнике; на фиг. 4 - разрез пс (
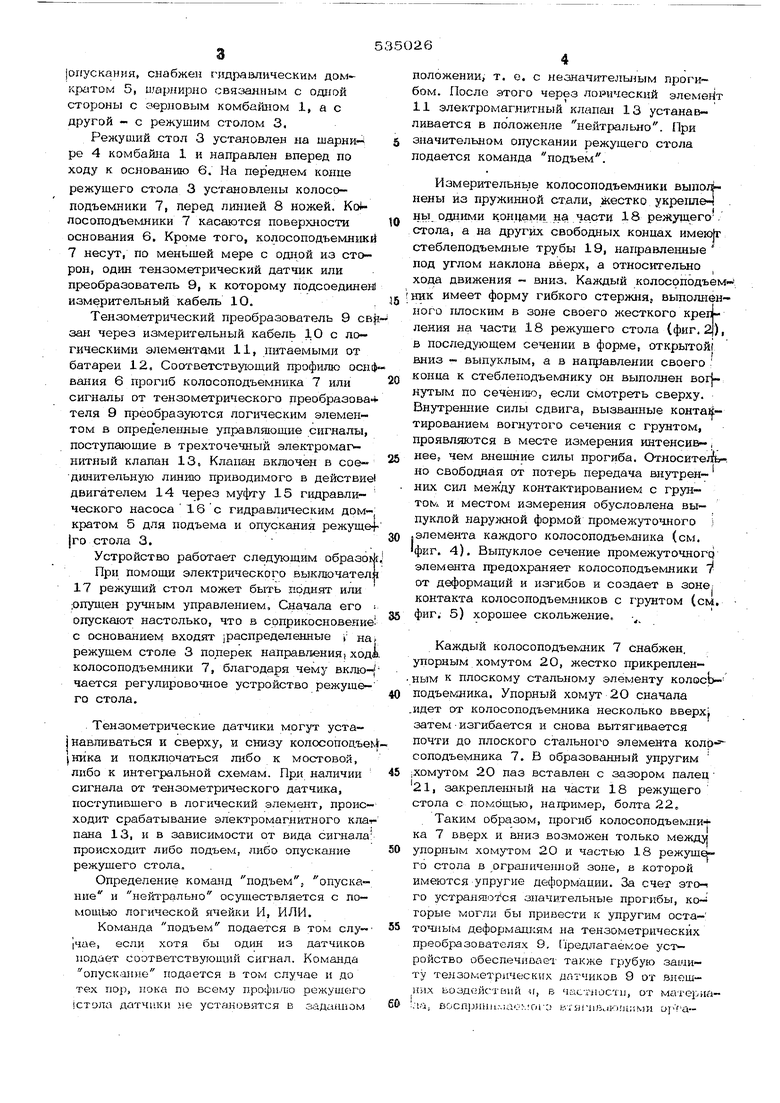
п ра фиг. 2: на фиг. 5 - разрез по на1 фиг. 2; на фиг. 6 - часть косилыюй балки режущего стола, вид сверху. : Зевновой комбайл 1 с колесом 2, на котором установлен режуп..ий стол 3 на
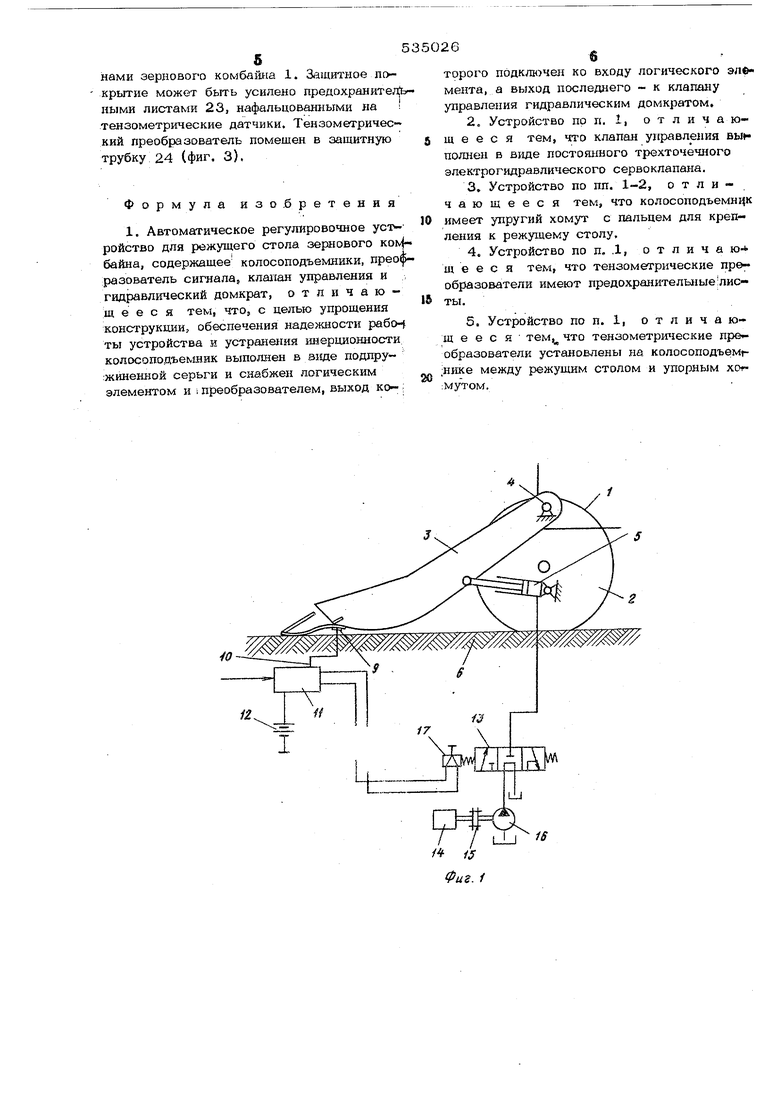
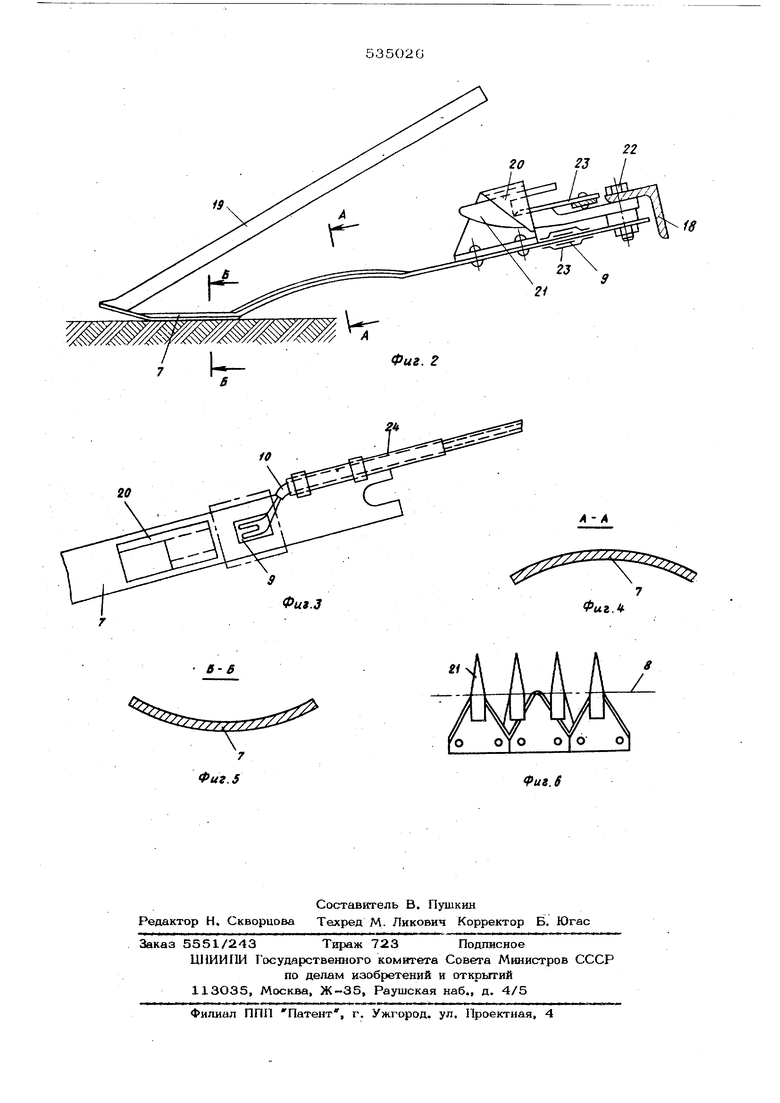
% шаониое 4 с возможностью подъема и joriycKaHHH, снабжен гидравлическим домкратом 5, ц.арнирно связанным с одной стороны с зерновым комбайном 1, а с другой - с режушим столом 3, Режуший стол 3 установлен на шарни- ре 4 комбайна 1 и направлен вперед по ходу к основанию 6. На переднем конце режущего стола 3 установлены колосоподъемники 7, перед линией 8 ножей, Ко лосоподъемники 7 касаются поверхности основания 6, Кроме того, колосоподъемникй 7 несут, по меньшей мере с ошюй из сторон, один тензометрический датчик или преобразователь 9, к которому подсоединен измерительный кабель 10. Тензометрический преобразователь 9 св зан через измерительный кабель 10 с логическими элементами 11, питаемыми от батареи 12. Соответствующий профилю осн вания 6 прогиб колосоиодьемника 7 или сигналы от тензометрического преобразова теля 9 преобразуются логическим элементом в определенлые управлшошие сигналы, поступающие в трехточечный электромагнитный клапан 13. Клапан включен в соединительную линию приводимого в действие двигателем 14 через муфту 15 пщравяинеского насоса 16с гидравли шским домкратом 5 для подъема и опускания режуще jro стола 3, Устройство работает следующим o6pa3oi При помощи электрического выключател 17 режущий стол может быть поднят или рпущен ручным управлением. Сначала его опускают настолько, что в соприкосновение с основанием входят jраспределенные на режушем столе 3 поперек направления) ход колосоподъемникй 7, благодаря чему включается регулировочное устройство режущего стола, , Тензометрические датчики могут уста|навливаться и сверху, и снизу колосопоаъе |ника и подключаться либо к мостовой, либо к интегральной схемам. При наличии сигнала от тензометрического датчика, поступивщего в логический элемент, происходит срабатывание электромагнитного кла пана 13, ив зависимости от вида сигнала происходит либо подъем, либо опускание режущего стола. . Определение команд подъем, опускание и нейч рально осуществляется с помощью логической ячейки И, ИЛИ. Команда подъем подается в том слу1чае, если хотя бы один из датчиков подает соответствующий сигнал. Команда опускание подается в том случае и до тех пор, пока по всему профи.шо режущс го стола датчики не установятся в заданном положении, т. е. с незначительным прогиом. После этого через лорический элемент 11 электромагнитный клапан 13 устанавивается в положение нейтрально. При значительном опускании режущего стола одается команда подъем. Измерительнью колосоподъемникй выпо/frнены из пружинной стали, жестко, укреплен . ны, одЕиаш концами на части 18 релеушего. стола, а на других свободных концах имею1г стеблеподъем11ые 19, направленные ° под углом наклона вверх, а относительно хода движения - вниз. Каждый колосоподъем- ник имеет форму гибкого стержня, выполненного плоским Б зоне своего жесткого крепления на части 18 режушего стола (фиг, 2)), в последующем сечении в форме, открытой вниз - выпуклым, а в нащзавлении своего конца к стеблеподъемнику он выпо/шен Borjнутым по сечению, если смотреть сверху. Внутренние силы сдвига, вызванные контайтированием вогнутого сечения с грунтом, проявляются в месте измерения интенсив-, нее8 чем внещние силы прогиба. OTHOcHTejfe-. но свободная от потерь передача внутренних сил между контактированием с грунтом и местом измерения обусловлена выпуклой наружной формой промежуточного i .элемента каждого кoлocoпoдъe яIикa (см, фкг. 4). Выпуклое сечение промежуточногр элемента предохраняет колосоподъемникй i от деформаций и изгибов и создает в зоне, контакта колосоподъемников с грунтом (см. фиг; 5) хорощее скольжение, Каждый колосоподъемник 7 снабжен, упорным хомутом 20, жестко прикрепленным к плоскому стальному элементу колосЬподъе1 шика. Упорный хомут 2 О сначала .идет от колосоподъемника несколько вверху затем изгибается и снова вытягивается почти до плоского стального элемента колр- соподъемника 7. В образованный упругим :хомутом 20 паз вставлен с зазором палец 21, закрепленный на части 18 режущего стола с помощью, патример, болта 22„ Таким образом, прогиб колосоподъемпи ка 7 вверх и вниз возможен только междм упорным хомутам 20 и частью 18 режущ&го стола в рграпиченной зоне, в которой имеются упругие деформации. За счет это-i го устраняющее я значительные прогибы, когорые могли бы привести к упругим остаточным деформациям па тензометрическйх преобразователях 9, фодлагаемое устройство обеспечивает также грубую заши- ту тензометрическнх датчиков 9 от влещ 1их воздействий ч, в частности, от материаL-ifij восп иН11ма(;:-:-.ог;) B sii-iuvijonuiMn opfa- нами зернового комбайна 1. покрытие может быть усилено предохранитеЛьными листами 23, нафапьцованными на i тензометрические датчики. Тензометричес кий преобразователь помешен в защитную трубку 24 (фиг. 3), Формула изобретения 1. Автоматическое регулировочное устройство для режущего стола зернового Kot4 байна, содержащее колосоподъемники, преофразователь сигнала, клапан управления и гидравлический домкрат, отличающееся тем, что, с целью упрощения конструкции, обеспечения надежности рабо-f ты устройства и устранения инерционности колосоподъемник выполнен в В1ще подпру жиненной серьги и снабжен логическим элементом и i преобразователем, выход ко-; 5 26 торого подключен ко входу логического элемента, а выход последнего к клапану управления гидравлическим домкратом. 2.Устройство по и. 1, о т л и ч а ющ е е с я тем, что клапан управления вын полнен в виде постоянного трехточечного электрогидравлического сервоклапана. 3.Устройство по пп. 1-2, отличающееся тем, что колосоподъемнцк имеет упругий хомут с пальцем для крепления к режущему столу. 4.Устройство по п, .1, о т л и ч а ю-ь щ е е с я тем, что тензометрические преобразователи имеют предохранительныелисты. 5. Устройство по п. 1, отлича ющ е е с я тем что тенаометрические преобразователи установлены на колосоподъемг;нике между режущим столом и упорным хо:МуТОМ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ ВИНДРОУЭР (ВАРИАНТЫ) И ЖАТКА ДЛЯ УБОРКИ ЗЕРНОВЫХ | 2008 |
|
RU2480979C2 |
| Устройство автоматического программного управления исполнительными органами угледобывающего комбайна по гипсометрии пласта | 1972 |
|
SU883418A1 |
| УЛЬТРАЗВУКОВОЕ ЛОКАЦИОННОЕ УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ СИСТЕМЫ УПРАВЛЕНИЯ ДВИЖЕНИЕМ | 1999 |
|
RU2248006C2 |
| УЗЕЛ БУРОВОГО СТЕНДА | 1992 |
|
RU2021461C1 |
| КОЛОСОПОДЪЕМНИК ДЛЯ КОСИЛОЧНЫХ СИСТЕМ УБОРОЧНЫХ МАШИН | 2002 |
|
RU2222886C1 |
| КОЛОСОПОДЪЕМНИК ДЛЯ КОСИЛОЧНЫХ СИСТЕМ УБОРОЧНЫХ МАШИН | 2002 |
|
RU2277321C2 |
| Жатка | 1976 |
|
SU579960A1 |
| Машина для уборки сельскохозяйственных культур | 1986 |
|
SU1355161A1 |
| СРЕДСТВО РЕГУЛИРОВАНИЯ ВЫСОТЫ ЖАТКИ С КОМПЕНСАЦИЕЙ ПРОГИБА ШИН | 2012 |
|
RU2607104C2 |
| Съемное устройство для уборки полеглых и зернобобовых культур | 1960 |
|
SU149643A1 |
Фиг.
Фиг. 2
6-6
8
ii
ro ото
