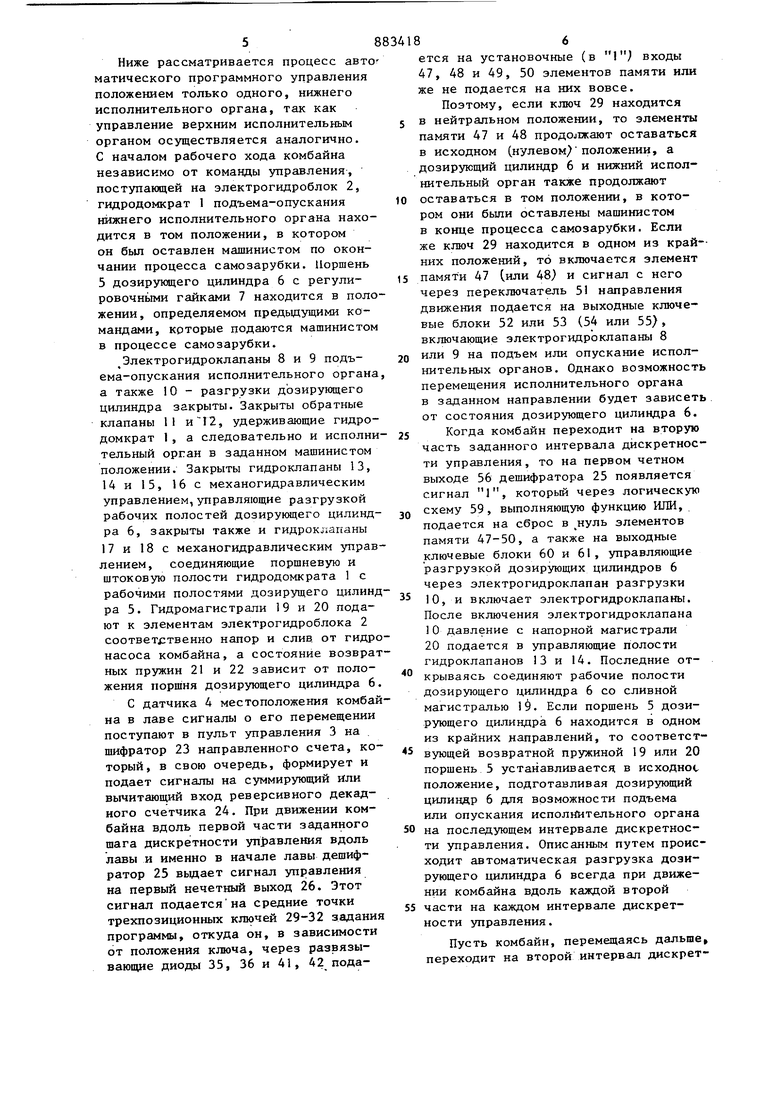
3 Цель изобретения - повышение надежности работы устройства. Поставленная цель достигается тем, что устройство снабжено логической схемой ИЛИ, злементами памяти вы: одными ключевыми блоками, гидро-f клапанами с механогидравлическим управлением и дозирующими цилиндрами с двумя рабочими полостями, каждая из которых через Электрогидроклапаны и через гидроклапаны с механогидравлическим управлением соединена с гидросистемой комбайна и соответствующими домкратами подъема-опускания исполнительных органов, причем в пульте управления нечетные выходы дешифратора подключены к средним точ кам трехпозиционных переключателей, а контакты последних через диоды подключены к одним входам элементов памяти, на другие входь которых через логическую схему ИЛИ соединены с четными выходами дешифратора, а к выходам элементов памяти переключатель направления движения комбайна и выходные ключевые блоки подсоединены Электрогидроклапаны. На фиг. 1 приведена гидравлическая схема устройства, на фиг. 2 электрическая схема. Штоковая и поршневая полости гидродомкрата 1 подъема-опускания каждого исполнительного органа соединены с электрогидроблоками 2, которые подключены к пульту управления 3 К нему также подключен датчик 4 местоположелия комбайна в лаве. Электрогидроблок 2 состоит из поршня 5 дозирующего цилиндра 6, на штоках которого размещены две регулировочных гайки 7. Поршневая и штоковая полости гидродомкрата 1, рабочие полости дозирующего цилиндра 6 соединены с электрогидроклапанами 8, 9 и 10 подъема-опускания исполнительного органа и разгрузки дозирующего цилиндра 6 соответственно через обратные клапаны I1 и 12с гидравлическим управлением и через гидроклапаны 13 и 14 с механогидравлическим управлением. Причем через гидроклапаны 13, 14 и 15, 16 с механогидравлическим управлением, такие же клапаны 17 и 18 рабочие полости дозирующего цилиндра 6 соединяются со ответственно со сливной магистралью 19 гидррсистемы комбайна и с поршневой и штоковой полостями гидродомкрата 1. Электрогидроклапаны 8-10 8 подключены к сливной и напорной магистралям 19 и 20 гидросистемы комбайна. Причем управляющие полости гидроклапанов 15 и 18 подключены непосредственно после электрогидроклапана 9, а управляющие полости гидроклапанов 16 и 17 - после электрогидроклапана 8. Фиксация поршня 5 в дозирующем цилиндре 6 обеспечивается с помощью возвратных пружин 21 и 22. Пульт управления 3 содержит шифратор направленного счета 23, соединенный со входами реверсивного декадного счетчика 24. К выходам счетчика 24 подключен дешифратор 25, имеющий п пар выходов. Его нечетные выходы 26, 27 и 28 подключены к-средним точкам двух рядов трехпозиционных ключей задания программы для нижнего 29-31 и верхнего 32-34 исполнительных органов. Крайние точки этих ключей через развязывающие диоды 35, 36, 37, 38, 39 и 40 и 41, 42, 43, 44, 45 и 46 подключены к одним из входов элементов памяти 47, 48, 49 и 50. Выходы этих элеме.нтов памяти через переключатель 51 направления движения комбайна подключены каждый в отдельности на входы выходных ключевых блоков 52, 53, 54 и 55. К последним, в свою очередь, подключены Электрогидроклапаны 8 и 9 в электрогидроблоках 2. Другие выходы 56, 57 и 58 дешифратора 25 подключены к логической схеме 59, выполняющей функцию ИЛИ, выход которой подключен на другие входы элементов памяти 47-50, а также на два дополнительных выходных ключевых блока 60 и 61, к которым в электрогидроблоках 2 подключены Электрогидроклапаны 10, служащие для разгрузки дозирующих цилиндров 6. Устройство автоматического программного управления работает следующим образом. После того, как машинист заканчивает процесс самозарубки, исполнительные органы остаются относительно корпуса комбайна и вмещающих боковых пород именно в том положенииi которое требуется для начала движения комбайна, причем изменение их положения вдоль лавы производится электрогидроблоками 2i управляемыми с пульта управления 3 по сигналам датчика 4 местоположения комбайна в лаве. 5 Ниже рассматривается процесс авт магического программного управления положением только одного, нижнего исполнительного органа, так как управление верхним исполнительным органом осуществляется аналогично. С началом рабочего хода комбайна независимо от команды управления, поступающей на электрогидроблок 2, гидродомкрат 1 подъема-опускания нижнего исполнительного органа нахо дится в том положении, в котором он был оставлен машинистом по окончании процесса самозарубки. Поршень 5 дозирующего цилиндра 6 с регулировочньши гайками 7 находится в пол жении, определяемом предыдущими командами, которые подаются машинисто в процессе самозарубки. Электрогидроклапаны 8 и 9 подъема-опускания исполнительного орган а также 10 - разгрузки дозирующего цилиндра закрыты. Закрыты обратные клапаны 11 , удерживающие гидро домкрат 1, а следовательно и исполн тельный орган в заданном машинистом положении. Закрыты гидроклапаны 13, 14 и 15, 16 с механогидравлическим управлением,управляющие разгрузкой рабочих полостей дозирующего цилинд ра 6, закрыты также и гидроклапаны 17 и 18 с механогидравлическим управ лением, соединяющие поршневую и штоковую полости гидродомкрата 1 с рабочими полостями дозирущего цилин ра 5. Гидромагистрали 19 и 20 подают к элементам электрогидроблока 2 соответ :твенно напор и слив, от гидр насоса комбайна, а состояние возвра ных пружин 21 и 22 зависит от положения поршня дозирующего цилиндра 6 С датчика 4 местоположения комба на в лаве сигналы о его перемещении поступают в пульт управления 3 на . шифратор 23 направленного счета, ко торый, в свою очередь, формирует и подает сигналы на суммирующий или вычитающий вход реверсивного декадиого счетчика 24. При движении комбайна вдоль первой части заданного шага дискретности управления вдоль лавы и именно в начале лавы дешифратор 25 выдает сигнал управления на первый нечетный выход 26. Этот сигнал подаетсяна средние точки трехпозиционных ключей 29-32 задани программы, откуда он, в зависимости от положения ключа, через развязывающие диоды 35, 36 и 41, 42 пода6ется на установочные (в ) входы 47, 48 и 49, 50 элементов памяти или же не подается на них вовсе. Поэтому, если ключ 29 находится в нейтральном положении, то элементы памяти 47 и 48 пpoдoJшaют оставаться в исходном (нулевом положении, а дозирующий цилиндр 6 и нижний исполнительный орган также продолжают оставаться в том положении, в котором они бьши оставлены машинистом в конце процесса самозарубки. Если же ключ 29 находится в одном из край-них положений, то включается элемент памяти 47 (или 48 и сигнал с него через переключатель 51 направления движения подается на выходные ключевые блоки 52 или 53 (54 или 55), включающие электрогидроклапаны 8 или 9 на подъем или опускание исполнительных органов. Однако возможность перемещения исполнительного органа в заданном направлении будет зависеть от состояния дозирующего цилиндра 6. Когда комбайн переходит на вторую часть заданного интервала дискретности управления, то на первом четном выходе 56 дешифратора 25 появляется сигнал 1, который через логическую схему 59, выполняющую функцию ИЛИ, подается на сброс в нуль элементов памяти 47-50, а также на выходные ключевые блоки 60 и 61, управляющие разгрузкой дозирующих цилиндров 6 через электрогидроклапан разгрузки 10, и включает электрогидроклапаны. После включения электрогидроклапана 10 давление с напорной магистрали 20 подается в управляющие полости гидроклапанов 13 и 14. Последние открываясь соединяют рабочие полости дозирующего цилиндра 6 со сливной магистралью 19. Если поршень 5 дозирующего цилиндра 6 находится в одном из крайних направлений, то соответствующей возвратной пружиной 19 или 20 поршень 5 устанавливается в исходное положение, подготавливая дозирующий цилиндр 6 для возможности подъема или опускания испол1 ительного органа на последующем интервале дискретности управления. Описанным путем происходит автоматическая разгрузка дозирующего цилиндра 6 всегда при движении комбайна вдоль каждой второй асти на каждом интервале дискретости управления. Пусть комбайн, перемещаясь дальше переходит на второй интервал дискретности управления и ключ 30 установлен в верхнее крайнее положение, задавая тем самым команду на подъем нижнего исполнительного органа на за данную величину. При этом сигнал с нечет-ного выхода 27 дешифратора 25 через ключ 30 включает (устанавливает в 1) элемент памяти 47. Сигнал с последнего через переключатель 51 направления движения и ключевой блок 52 включает электрогидроклапан 9 подъема нижнего исполнительного ор гана. В результате давление с напорной магистрали 20 через обратный клапан 11 подается в штоковую полость гидродомкрата 1 и непосредственно через электрогидроклапан 9 в управляю щую полость гидроклапана 15, который соединяет в это же время левую рабочую полость дозирующего- цилиндра со сливной магистралью 19. ПорЦ1 1 рабочей жидкости со штоковой полости гидродомкрата 1, переливаяс в правую рабочую полость дозирующег цилиндра 6, обеспечивает подъем исполнительного органа на заданную величину. Регулировка величины подъ ема или опускания исполнительного органа осуществляется, заранее с помощью регулировочных гаек 7, располагающихся на штоках поршня 5 дозирукяцего цилиндра 6. Аналогично производится опускани исполнительного органа. При этом включаются элементы 48 и 53, электр гидроклапан 8 и связанные с ним элементы электрогидроблОка 2. Таким образом, с помощью двух рядов трехпозиционных переключателей задается программа обработки комбай ном поверхности почвы и кровли неза висимо от того, каким (правым или левым) исполнительным органом каждая из них будет обрабатываться. При этом одновременно с повьшением надежности работы устройства обеспе чивается любая корректировка заданной программы обработки забоя испол нительными органами комбайна. Формула изобретения Устройство автоматического управ ления исполнительными органами угле 88 добьшающего комбайна по гипсометрии пласта, содержащее пульт управления, включающий шифратор направленного счета, рев.ерсивный счетчик, дешифратор, трехпозиционные ключи задания программы, диоды, перключатель направления движения комбайна, датчик местоположения комбайна в лаве, злектрогидроклапаны, гидродомкраты подъема-опускания исполнительных органов и гидросистему, отличающееся тем, что, с целью повышения надежзюсти работы устройства, оно снабжено логической схемой ИЛИ, элементами памяти, выходными ключевыми блоками, гидроклапанами с механогидравлическим управлением и дозирующими цилиндрами с двумя рабочими полостями, каждая из которых через электрогидроклапаны и через гидроклапаны с механогидравлическим управлением соединена с гидросистемой комбайна и соответствующими гидродомкратами подъема-опускания исполнительных органов, причем в пульте управления нечетные выходы дешифратора подключены к средним точкам трехпозиционных переключателей, а контакты последних через диоды подключены к одним входам элементов памяти, на другие входы которых через логическую схему ИЛИ соединены с четными выходами дешифратора, а к выходам элементов памяти через переключатель направления движения комбайна и выходные ключевые блоки подсоединены электрогидроклапаны. Источники информации, принятые во внимание при экспертизе 1.Злодеев А.В. и др. Программное регулирование режущими органами комбайна по гипсометрии и мощности пласта. - Сб./Горные машины и автоматика.- М., ЦНИЭИуголь, 1969, № 7, (112) 2.Отчет Разработка способов и средств дистанционного, программного и автоматического управления комплексами оборудования с механизированными крепями и угледобывающими агрегатами. - г. Новомосковск, ПНИУИ, 1964-1965, № У-7-62,63, У-10-63 (поототип).
Фиг.1

| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДОЛИНСКОГО МКД, СИСТЕМА УПРАВЛЕНИЯ КРЕПЬЮ, МЕЖСЕКЦИОННАЯ ЗАТЯЖКА КРЕПИ, ГИДРОСИСТЕМА КРЕПИ | 1999 |
|
RU2181842C2 |
| Способ автоматического контроля и регулирования прямолинейности траектории движения горнодобывающего комплекса и устройство для его осуществления | 1985 |
|
SU1325168A1 |
| Установка для деформирования трубчатых заготовок | 1982 |
|
SU1065061A1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ЗАХВАТНО-СРЕЗАЮЩИМ УСТРОЙСТВОМ ВАЛОЧНО-ПАКЕТИРУЮЩЕЙ МАШИНЫ | 2013 |
|
RU2529156C2 |
| Способ управления очистным комплексом | 1988 |
|
SU1523661A1 |
| Устройство для управления перемещением базы механизированной крепи | 1980 |
|
SU877058A1 |
| Угольный комбайн для крутопадающихи НАКлОННыХ плАСТОВ | 1979 |
|
SU798291A1 |
| Система рулевого управления автопоезда | 1987 |
|
SU1474016A1 |
| Устройство управления базой выемочной машины | 1986 |
|
SU1442651A1 |
| ЧЕЛНОКОВАЯ УГЛЕРЕЗНАЯ МАШИНА | 2011 |
|
RU2467167C1 |


