ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к сельскохозяйственным транспортным средствам. Более конкретно, оно относится к уборочным комбайнам. А еще более конкретно, оно относится к регулированию высоты жаток уборочных комбайнов.
УРОВЕНЬ ТЕХНИКИ
Уборочные комбайны представляют собой большие сельскохозяйственные машины, которые движутся по сельскохозяйственным полям, скашивая, обмолачивая, сортируя и очищая возделываемые растения. Они содержат самоходное сельскохозяйственное транспортное средство с обмолачивающими, сортирующими и очищающими механизмами. Также они содержат скашивающие механизмы, установленные впереди транспортного средства для скашивания и подбора широкой полосы сельскохозяйственной культуры и ее подачи в обмолачивающий, сортирующий и очищающий механизмы транспортного средства. Транспортное средство или транспортное средство и скашивающий механизм может называться «уборочная машина», «уборочный комбайн», «сельскохозяйственный комбайн» или аналогичными терминами.
Скашивающие механизмы называются по-разному «режущие головки», «уборочные приставки», «навесные устройства», «жатки» или аналогичными терминами. Как правило, жатки содержат удлиненные рамы, которые поддерживают удлиненные ножи и транспортеры для подачи сельскохозяйственной культуры. Жатки могут быть двадцати или сорока футовой ширины. Как правило, их подвешивают или прикрепляют одним концом перед поднимающим сельскохозяйственную культуру транспортером или «приемной камерой молотилки». Приемная камера молотилки шарнирно соединена и продолжается вперед от шасси или рамы транспортного средства.
Жатки, которые выполнены с возможностью уборки низко расположенных возделываемых растений, наподобие сои или пшеницы, могут следовать очень близко от земли, так чтобы ножи жатки, которые срезают растение с земли, могли полностью забираться под растение, срезать стебель растения, и растение могло быть убрано по существу целиком.
Земля на сельскохозяйственных полях не является абсолютно плоской, вследствие этого для автоматического поднятия и опускания жатки относительно транспортного средства по мере движения уборочного комбайна по полю используется система регулирования высоты жатки. Когда земля под жаткой поднимается и опускается, система управления высотой жатки с обратной связью поднимает и опускает приемную камеру молотилки в соответствии с поддержанием постоянного расстояния между жаткой (установленным на передней части приемной камеры молотилки) и землей.
Расстояние между жаткой и землей трудно поддерживать постоянным. В последние годы инженеры разработали более широкие и более тяжелые жатки. В дополнение они разработали транспортные средства со значительно большими колесами и шинами для распределения данной увеличенной нагрузки более равномерно на земле и вследствие этого уменьшения уплотнения земли.
Более большие шины действуют наподобие пружин, допуская подпрыгивание вверх и вниз транспортного средства, а следовательно, жатки, установленной на передней части транспортного средства, по мере того, как колеса катятся по земле. Даже хуже, система недостаточно срабатывает, так как колеса транспортного средства могут быть настолько мягкими, что они сжимаются в ответ на подъем жатки системой управления высотой жатки и разжимаются в ответ на опускание жатки системой управления высотой жатки.
В крайних случаях система управления высотой жатки и сжимаемые шины могут быть настолько плохими, что шины уборочного комбайна начинают полностью отрываться от земли, так как система управления высотой жатки становится неустойчивой.
Необходима система управления высотой жатки, которая динамически амортизирует реакцию для компенсации прогиба (т.е. сжимания и разжимания) шин уборочного комбайна. Задачей является создание такой системы. Проблема решается с помощью конструкции по пункту 1 формулы изобретения, дополнительные признаки и преимущества обеспечиваются конструкциями по пунктам, зависимым от пункта 1.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
В соответствии с одним аспектом изобретения система управления высотой жатки содержит датчик высоты жатки и датчик сжатия шин, соединенные с электронным блоком управления. Электронный блок управления запрограммирован для регулирования высоты жатки до предварительно заданного расстояния над землей. Электронный блок управления принимает сигнал от датчика высоты жатки, указывающий положение жатки относительно земли, принимает сигнал от датчика сжатия шин, указывающий степень сжатия шин, объединяет два сигнала и использует объединенный сигнал в качестве сигнала обратной связи в алгоритме управления положением и подает выходной сигнал от алгоритма управления положением в клапан управления подъемным цилиндром приемной камеры молотилки.
Для объединения двух сигналов электронный блок управления добавляет к датчику высоты жатки сигнал от датчика сжатия шин.
Другими устройствами, которые могут быть использованы для датчика движения корпуса/сжатия шин, могут быть датчик давления в шинах или сигнал давления подъемного цилиндра приемной камеры молотилки, акселерометр, гиротахометр, механический датчик на передней или задней осях и датчик отклонения подвески.
В соответствии с еще одним аспектом изобретения сельскохозяйственная уборочная машина содержит самоходное транспортное средство, имеющее переднюю часть; приемную камеру молотилки, шарнирно установленную на передней части самоходного транспортного средства; пневматические шины, поддерживающие транспортное средство для передвижения по земле; жатку, установленную на передней части самоходного транспортного средства; гидравлические цилиндры, соединенные с самоходным транспортным средством и приемной камерой молотилки и между ними, для поднятия и опускания приемной камеры молотилки при выдвижении и втягивании гидравлических цилиндров; клапан, соединенный с гидравлическими цилиндрами для регулирования потока гидравлической текучей среды в гидравлические цилиндры из источника гидравлической текучей среды под давлением и для проведения гидравлической текучей среды из гидравлических цилиндров в резервуар; схему управления высотой жатки, дополнительно содержащую электронный блок управления, соединенный с клапаном, при этом электронная схема управления выполнена с возможностью приведения в действие клапана для поднятия и опускания жатки, датчик сжатия шин, соединенный с электронной схемой управления, причем датчик сжатия шин выполнен с возможностью выдачи в электронный блок управления сигнала, указывающего давление пневматических шин, и датчик высоты жатки, выполненный с возможностью генерирования сигнала, указывающего высоту жатки относительно земли.
Электронный блок управления может быть выполнен с возможностью получения сигнала, указывающего давление пневматических шин, и получения сигнала, указывающего высоту жатки относительно земли, и объединения двух сигналов для создания сигнала компенсированной высоты жатки. Электронный блок управления может быть выполнен с возможностью определения сигнала ошибки высоты жатки на основании объединения сигнала компенсированной высоты жатки и базового сигнала, указывающего заданную высоту жатки. Электронный блок управления может быть выполнен с возможностью вычисления сигнала управления на основании сигнала ошибки высоты жатки, который переместит жатку на заданную высоту. Сигнал управления может быть пропорциональным сигналу ошибки высоты жатки. Электронный блок управления может быть выполнен с возможностью вычисления сигнала клапана, который подается в клапан. Электронный блок управления может подавать сигнал клапану для приведения в действие гидравлических цилиндров со скоростью выдвижения или втягивания, который является пропорциональным сигналу ошибки высоты жатки. Датчик сжатия шин может быть выполнен с возможностью определения давления текучей среды по меньшей мере одного из гидравлических цилиндров.
В соответствии с еще одним аспектом изобретения предложена схема управления высотой жатки для регулирования высоты жатки, установленной на самоходном транспортном средстве, имеющем пневматические шины для перемещения самоходного транспортного средства по земле, при этом схема управления высотой жатки содержит электронный блок управления, соединенный с исполнительными механизмами, которые поднимают и опускают жатку; датчик сжатия шин, соединенный с электронным блоком управления, для выдачи в электронный блок управления сигнала, указывающего давление пневматических шин; и датчик высоты жатки, соединенный с электронным блоком управления, для выдачи в электронный блок управления сигнала, указывающего высоту жатки.
Электронный блок управления может быть выполнен с возможностью получения сигнала, указывающего давление пневматических шин, и получения сигнала, указывающего высоту жатки относительно земли, и объединения двух сигналов для создания сигнала компенсированной высоты жатки. Электронный блок управления может быть выполнен с возможностью определения сигнала ошибки высоты жатки на основании объединения сигнала компенсированной высоты жатки и базового сигнала, указывающего заданную высоту жатки. Электронный блок управления может быть выполнен с возможностью вычисления сигнала управления на основании сигнала ошибки высоты жатки, который переместит жатку на заданную высоту. Сигнал управления может быть пропорциональным сигналу ошибки высоты жатки. Электронный блок управления может быть выполнен с возможностью вычисления сигнала клапана, который подается в клапан. Электронный блок управления может подавать сигнал клапану для приведения в действие гидравлических цилиндров со скоростью выдвижения или втягивания, который является пропорциональным сигналу ошибки высоты жатки. Электронный блок управления может быть запрограммирован для управления жаткой с предварительно заданной высотой над землей.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 представляет собой сельскохозяйственный комбайн с жаткой согласно представленному изобретению.
Фиг.2 представляет собой схематичное изображение элементов системы управления высотой жатки.
Фиг.3 представляет собой изображение алгоритма управления.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНОГО ВАРИАНТА ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Со ссылкой на фиг.1 показана сельскохозяйственная уборочная машина 100, содержащая самоходное транспортное средство 102 и жатку 104. Жатка установлена на приемной камере молотилки 106, которая расположена впереди переднего конца транспортного средства 102. Приемная камера молотилки шарнирно соединена с транспортным средством 102 таким образом, чтобы ее передний конец мог поворачиваться вверх и вниз относительно шасси или рамы транспортного средства 102 и за счет этого поднимать или опускать жатку 104, которая установлена на передней части приемной камеры молотилки 106.
Для определения расстояния между жаткой и землей с жаткой 104 соединен датчик 108 высоты жатки.
Транспортное средство 102 поддерживается на четырех колесах, включая два передних колеса 112 и два задних колеса 114 (показано только одно). Передние колеса 112 могут содержать по одному колесу с каждой стороны транспортного средства, или они могут содержать по два колеса с каждой стороны транспортного средства. Передние колеса 112 содержат пневматические шины 116, которые установлены на ободах 118 и наполнены находящимся под давлением воздухом или другим сжимаемым материалом. Передние колеса 112 являются неуправляемыми, а прикреплены в точке прямо впереди в направлении движения. Задние колеса являются управляемыми оператором для поворота сельскохозяйственного комбайна в поле.
Передние колеса большие и имеют относительно гибкие боковые стенки. Они выполнены с возможностью приспосабливания к полю своими нижними поверхностями и оставлять относительно обширный и широкий отпечаток шины на земле. Такой большой отпечаток шины возможен только с пониженным давлением воздуха в шине, что делает протектор относительно гибким, чтобы следовать контурам земли. В результате, когда нагрузка на транспортное средство 102 повышается и понижается, участок сцепления шины с землей изменяет форму, увеличивая свой размер и расплющиваясь на земле с дополнительной нагрузкой и уменьшаясь в размере и становясь более круглым, когда нагрузка на комбайн уменьшается.
Когда задние колеса сжимаются вследствие увеличенной нагрузки на транспортное средство 102, центр колес смещается ближе к земле, боковые стенки выпячиваются, профиль колеса уплощается, а размер участка сцепления увеличивается.
Одной кратковременной причиной данной повышенной нагрузки могут быть ускорения, вызванные кинематикой земли (например, повышением и понижением поверхности земли, по которой катятся колеса), толкающей нижнюю часть шин и толкающей шасси транспортного средства вверх или уходящей из-под колес. Еще одна кратковременная причина данной повышенной нагрузки может возникать вследствие подъема или опускания приемной камеры молотилки относительно транспортного средства 102 системой управления высотой жатки.
Независимо от причины повышенной нагрузки одно является действительным: за считанные несколько сотен миллисекунд транспортное средство спружинит вверх, высвобождая энергию, накопленную в шинах в виде деформированных боковых стенок и повышенного давления воздуха в шинах, и транспортное средство и жатка вернутся к своей предшествующей высоте.
Система управления высотой жатки сжимает шины в вертикальном направлении всякий раз, когда она неожиданно поднимает жатку относительно транспортного средства. После того как она закончила подъем жатки, колеса ослабят свое напряжение, разожмутся и транспортное средство (и жатка) будут ощущать давление вверх, назад к своей номинальной форме, которую они имеют, находясь в покое.
Со ссылкой на фиг.2, жатка 104 установлена на передней части приемной камеры молотилки 106. Задняя часть приемной камеры молотилки шарнирно соединена с шасси 200 транспортного средства 102. Исполнительные механизмы (показаны в данном случае, как гидравлические подъемные цилиндры 202 приемной камеры молотилки) установлены параллельно на противоположных сторонах приемной камеры молотилки и соединены с шасси 200 на одном конце и с приемной камерой молотилки 106 на другом конце. Несмотря на то, что в данном случае показаны два исполнительных механизма, достаточно любого одного.
Когда цилиндры 202 выдвигаются, они вызывают поворот приемной камеры молотилки относительно транспортного средства 102 вокруг центра 204 вращения и вызывают подъем передней части приемной камеры молотилки (а следовательно, жатки 104) выше над землей. Когда цилиндры 202 втягиваются, они вызывают поворот приемной камеры молотилки 106 в противоположном направлении относительно транспортного средства 102 и вызывают опускание приемной камеры молотилки (а следовательно, жатки 104) ближе к земле.
Схема 208 управления высотой жатки предусмотрена для управления высотой жатки 104 над землей посредством выдвижения или втягивания цилиндров 202. Схема 208 управления высотой жатки содержит электронный блок 210 управления, который дополнительно содержит цифровой микроконтроллер, схемы приводных механизмов клапанов, схемы обработки сигналов, цифровую память для сохранения цифровых команд для цифрового микроконтроллера и оперативную память для хранения цифровых значений, используемых цифровым микроконтроллером, когда он выполняет команды, хранящиеся в цифровой памяти.
Схема 208 управления высотой жатки также содержит датчик 212 сжатия шин (в общем, движения корпуса), который генерирует сигнал, указывающий степень сжатия передних шин транспортного средства 102 (в общем, сигнал, указывающий движение корпуса в вертикальном направлении). В данном варианте осуществления датчик 212 сжатия шин коррелирует с давлением гидравлической текучей среды в цилиндрах 202, при этом изменение давления в цилиндрах указывает степень сжатия передних шин. В качестве альтернативы, датчиком сжатия шин может быть датчик 212А, который указывает давление воздуха внутри одного или обоих передних колес 112, поскольку колебания давления воздуха в шине указывают степень сжатия шины. В качестве альтернативы, она может содержать тензодатчик 212В для измерения прогиба стенок передних шин, поскольку прогиб боковых стенок свидетельствует о степени сжатия шин. В качестве альтернативы, это может быть неконтактный датчик 212С, такой как радарный или лазерный датчик, который расположен рядом с передними шинами таким образом, чтобы он мог определять расстояние до земли под передними колесами и, таким образом, степень сжатия передних колес.
Схема 208 управления высотой жатки также содержит датчик 108 высоты жатки. Датчик 108 высоты жатки предпочтительно содержит потенциометр, соединенный с удлиненным элементом 109 для выдачи сигнала, указывающего положение (высоту) жатки 104 относительно земли. Датчик 108 высоты жатки предпочтительно является контактным датчиком, который показан в данном случае. Контактный датчик предпочтительно содержит удлиненный элемент 109, который продолжается от чувствительного элемента датчика и волочится по земле, по мере движения транспортного средства вперед по сельскохозяйственному полю. В качестве альтернативы, это может быть альтернативное средство определения дальности, предпочтительно устройство отражения сигнала, такое как радар и лазерное устройство.
Как датчик 108 высоты жатки, так и датчик 212 сжатия шин/движения корпуса соединены с электронным блоком 210 управления для подачи в электронный блок 210 управления сигналов, которые указывают высоту жатки и сжатие передних шин соответственно.
Схема 208 управления высотой жатки также содержит клапан 214. Клапан 214 содержит соленоидный исполнительный механизм 216, который соединен с электронным блоком 210 управления и находится под его управлением. Клапан 214 также соединен с источником 217 находящейся под давлением гидравлической текучей среды и с резервуаром 218 гидравлической текучей среды. Резервуар 218 гидравлической текучей среды обеспечивает гидравлическую текучую среду с по существу постоянным давлением в широком диапазоне скоростей потока. Электронный блок 210 управления выполнен с возможностью избирательной подачи сигнала клапану 214 для подачи гидравлической текучей среды под давлением из источника 217 в подъемные цилиндры 202 приемной камеры молотилки, выдвигая посредством этого цилиндры 202 и поднимая приемную камеру молотилки и жатку. Электронный блок 210 управления также выполнен с возможностью избирательной подачи сигнала клапану 214 для выпуска гидравлической текучей среды под давлением из цилиндров 202 в резервуар 218, втягивая посредством этого цилиндры 202 и опуская приемную камеру молотилки и жатку. Клапан 214 является пропорциональным распределительным клапаном, в котором отверстие клапана (а следовательно, поток через клапан) является пропорциональным сигналу, применяемому к клапану. В предпочтительном варианте осуществления сигналом, применяемым к клапану, является токовый сигнал.
Схема приводного механизма клапана в электронном блоке 210 управления передает изменяемый сигнал широтно-импульсной модуляции в соленоидный исполнительный механизм 216, который является пропорциональным требуемой объемной скорости течения гидравлической текучей среды через клапан в гидравлические цилиндры 202. Данная скорость течения, в свою очередь, пропорциональна скорости выдвижения или втягивания гидравлических цилиндров 202. Каждая команда клапану, примененная к соленоидному исполнительному механизму, пропорциональна требуемой или намеченной скорости (выдвижения или втягивания) цилиндров 202. Конкретная скорость выдвижения и втягивания зависит главным образом от конфигурации цилиндра, конфигурации точек его крепления к приемной камере молотилки и комбайну и массы жатки и приемной камеры молотилки. Конкретная функция скорости, генерируемая алгоритмом, может быть определена эмпирически посредством выбора различных функций скорости, введения в систему ступенчатой функции и определения, является ли стабильной реакция демпфирования, и в случае стабильности определения, является ли излишне или недостаточной демпфированной, чтобы предоставить наиболее быстрый ответ с наиболее низкой требуемой тенденцией стать нестабильной.
Клапан 214 может содержать множество клапанных элементов, в которых один элемент (или больше) задействован для наполнения цилиндров текучей средой и поднятия приемной камеры молотилки, а еще один (или больше) задействован для выпуска текучей среды из цилиндров и опускания приемной камеры молотилки. Соленоидный исполнительный механизм 216 может содержать множество соленоидов, на каждый из которых электронный блок 210 управления может независимо подавать электроэнергию для управления клапаном 214. Кроме того, может быть предусмотрен по меньшей мере один (или более) соленоидов для управления клапанными элементами для выпуска текучей среды из цилиндров и опускания приемной камеры молотилки. Предпочтительно соленоид, который поднимает приемную камеру молотилки при приведении в действие электронным блоком 210 управления, и соленоид для опускания приемной камеры молотилки при приведении в действие электронным блоком 210 управления.
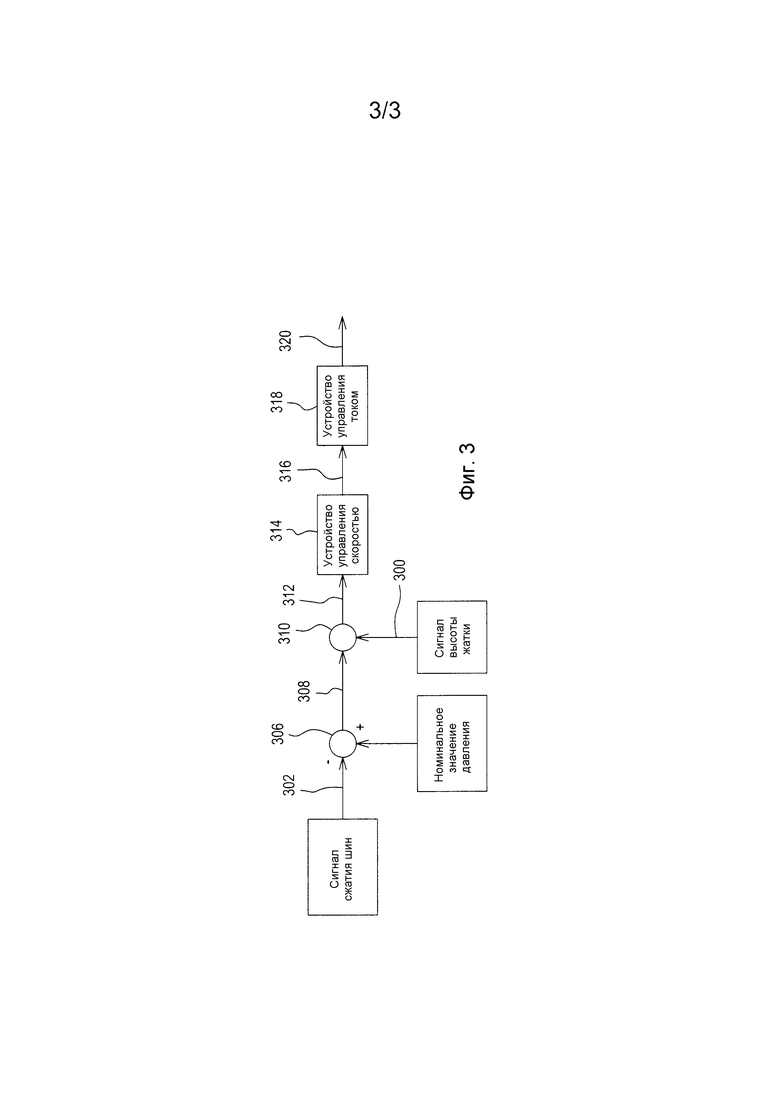
Фиг.3 иллюстрирует алгоритм управления, хранящийся в схемах памяти электронного блока 210 управления, который выполняется электронным блоком 210 управления в процессе работы сельскохозяйственного комбайна.
Система принимает сигнал 300 высоты жатки от датчика 108 высоты жатки. Данный сигнал показывает положение (высоту) жатки относительно земли. Она также принимает сигнал 302 сжатия шин от датчика 212 сжатия шин, который показывает мгновенное сжатие шины. Данный сигнал показывает степень сжатия передних шин.
Система объединяет два сигнала в узле 304. Задача объединения сигнала сжатия шин с сигналом 300 высоты жатки состоит в том, чтобы компенсировать сигнал высоты жатки сигналом сжатия.
Сигнал 302 сжатия выдается в алгоритм 306 демпфирования/компенсации давления, который вычитает сигнал сжатия из номинального значения сжатия для получения сигнала 308, указывающего изменение (или небольшое изменение) сжатия от номинального сжатия к фактическому, измеренному сжатию шин.
Данный сигнал 308 небольшого изменения сжатия указывает краткосрочное сжатие шин, т.е. ту часть сжатия шин, которая отличается от номинального (например, среднего) сжатия шин по мере того, как они катятся по плоской земле без динамики шин и транспортного средства (т.е. без подпрыгивания вверх и вниз, сжатия и расжимания шин). Сигнал 308 небольшого изменения сжатия фактически измеряет направленный вверх или вниз прогиб колес относительно данного номинального сжатия.
В узле 310 суммирования алгоритм суммирует сигнал 300 высоты жатки и сигнал 308 небольшого изменения сжатия для получения сигнала 312 компенсированной высоты жатки. Данный сигнал более точно показывает, какая будет высота жатки, когда передние шины отскакивают назад (т.е. возвращаются) в свое номинальное положение.
После того как был вычислен сигнал компенсированной высоты жатки, он затем выдается в базовый алгоритм управления высотой жатки, который в данном случае является алгоритмом 314 управления скоростью. Алгоритм 314 управления скоростью принимает сигнал 312 компенсированной высоты жатки, сравнивает компенсированную высоту жатки с требуемой высотой жатки (т.е. высотой, при которой оператор предпочитает задействовать жатку) и генерирует сигнал 316 скорости, указывающий требуемую скорость жатки 104 для приближения жатки к наибольшей высоте.
Затем сигнал 316 скорости выдается в алгоритм 318 регулирования тока, который генерирует команду 320 тока, указывающую ток, который должен быть создан схемой приводного механизма клапана в электронном блоке 210 управления и применен к соленоидному исполнительному механизму 216, чтобы вызвать открытие клапана 214 на величину, достаточную для перемещения гидравлических цилиндров 202 с заданной скоростью.
После описания предпочтительного варианта осуществления становится понятно, что могут быть выполнены различные изменения, не выходящие за рамки объема изобретения, определенного в приложенной формуле изобретения.


Группа изобретений относится к области сельскохозяйственного машиностроения. Система управления высотой жатки содержит датчик высоты жатки и датчик сжатия шин. Датчики соединены с электронным блоком управления. Два сигнала датчиков объединяются электронным блоком управления для получения сигнала компенсированной высоты жатки. Сигнал компенсированной высоты жатки компенсирует кратковременный прогиб пневматических шин транспортного средства. Сигнал компенсированной высоты жатки используется электронным блоком управления для регулирования высоты жатки в алгоритме управления высотой жатки. Обеспечивается возможность динамической компенсации прогиба шин уборочного комбайна. 2 н. и 14 з.п. ф-лы, 3 ил.
1. Сельскохозяйственная уборочная машина (100), содержащая:
самодвижущееся транспортное средство (102), имеющее переднюю часть;
приемную камеру молотилки (106), шарнирно установленную на передней части самодвижущегося транспортного средства (102);
пневматические шины (116), поддерживающие транспортное средство (102) для передвижения по земле;
жатку (104), установленную на передней части самодвижущегося транспортного средства (102);
гидравлические цилиндры (202), соединенные с самоходным транспортным средством (102) и приемной камерой молотилки (106) и между ними, для поднятия и опускания приемной камеры молотилки (106) при выдвижении и втягивании гидравлических цилиндров (202);
клапан (214), соединенный с гидравлическими цилиндрами (202) для регулирования потока гидравлической текучей среды в гидравлические цилиндры (202) из источника гидравлической текучей среды под давлением и для проведения гидравлической текучей среды из гидравлических цилиндров (202) в резервуар;
схему (208) управления высотой жатки, дополнительно содержащую электронный блок (210) управления, соединенный с клапаном (214), при этом электронная схема управления выполнена с возможностью приведения в действие клапана (214) для поднятия и опускания жатки (104), датчик (212) сжатия шин, соединенный с электронной схемой (210) управления, причем датчик сжатия шин выполнен с возможностью выдачи в электронный блок (210) управления сигнала, указывающего давление пневматических шин (116), и датчик (108) высоты жатки, выполненный с возможностью генерирования сигнала, указывающего высоту жатки (104) относительно земли.
2. Сельскохозяйственная уборочная машина (100) по п.1, в которой электронный блок (210) управления выполнен с возможностью получения сигнала, указывающего давление пневматических шин (116), и получения сигнала, указывающего высоту жатки (104) относительно земли, и объединения двух сигналов для создания сигнала компенсированной высоты жатки.
3. Сельскохозяйственная уборочная машина (100) по п.2, в которой электронный блок (210) управления выполнен с возможностью определения сигнала ошибки высоты жатки на основании объединения сигнала компенсированной высоты жатки и базового сигнала, указывающего заданную высоту жатки.
4. Сельскохозяйственная уборочная машина (100) по п.3, в которой электронный блок (210) управления выполнен с возможностью вычисления сигнала управления на основании сигнала ошибки высоты жатки, который переместит жатку на заданную высоту.
5. Сельскохозяйственная уборочная машина (100) по п.4, в которой сигнал управления пропорционален сигналу ошибки высоты жатки.
6. Сельскохозяйственная уборочная машина (100) по п.4, в которой электронный блок (210) управления выполнен с возможностью вычисления сигнала клапана, который подается в клапан (214).
7. Сельскохозяйственная уборочная машина по п.4, в которой электронный блок управления подает сигнал клапану (214) для приведения в действие гидравлических цилиндров (202) со скоростью выдвижения или втягивания, который пропорционален сигналу ошибки высоты жатки.
8. Сельскохозяйственная уборочная машина по п.1, в которой датчик сжатия шин выполнен с возможностью измерения давления текучей среды по меньшей мере одного из гидравлических цилиндров (202).
9. Схема (208) управления высотой жатки для регулирования высоты жатки (104), установленной на самоходном транспортном средстве (102), имеющем пневматические шины (116) для перемещения самоходного транспортного средства (102) по земле, содержащая:
электронный блок (210) управления, соединенный с возможностью приведения в действие с исполнительными механизмами (202), которые поднимают и опускают жатку (104);
датчик (212) сжатия шин, соединенный с электронным блоком (210) управления, для выдачи в электронный блок (210) управления сигнала (302), указывающего давление пневматических шин (116); и
датчик (108) высоты жатки, соединенный с электронным блоком (210) управления, для выдачи сигнала, указывающего высоту жатки (104).
10. Схема (208) управления высотой жатки по п.9, в которой электронный блок (210) управления выполнен с возможностью получения сигнала, указывающего давление пневматических шин (116), получения сигнала, указывающего высоту жатки (104), и объединения двух сигналов для создания сигнала компенсированной высоты жатки.
11. Схема (208) управления высотой жатки по п.10, в которой электронный блок (210) управления выполнен с возможностью определения сигнала ошибки высоты жатки на основании объединения сигнала компенсированной высоты жатки и базового сигнала, указывающего заданную высоту жатки.
12. Схема (208) управления высотой жатки по п.11, в которой электронный блок (210) управления выполнен с возможностью вычисления сигнала управления на основании сигнала ошибки высоты жатки, который переместит жатку на заданную высоту.
13. Схема (208) управления высотой жатки по п.12, в которой сигнал управления пропорционален сигналу ошибки высоты жатки.
14. Схема (208) управления высотой жатки по п.12, в которой электронный блок (210) управления выполнен с возможностью вычисления сигнала клапана, который подается в клапан (214).
15. Схема (208) управления высотой жатки по п.12, в которой электронный блок управления подает клапану (214) сигнал для приведения в действие гидравлических цилиндров (202) со скоростью выдвижения или втягивания, который пропорционален сигналу ошибки высоты жатки.
16. Схема (208) управления высотой жатки по п.9, в которой электронный блок (210) управления запрограммирован для управления жаткой с предварительно заданной высотой над землей.
| US 5794421 A, 18.08.1998 | |||
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Автоматическое выравнивающее устройство для поддержания рам сельскохозяйственных машин | 1958 |
|
SU121615A1 |
| EP 1930188 B1, 11.06.2008. | |||

