Указанный |Эффект достигается в диапазоне углов Y 30-5°, р 0-3°, где у - угол, образованный опорными поверхностями упругого элемента и корпуса; р - угол между онорной товерхностыо корпуса и горизонталью.
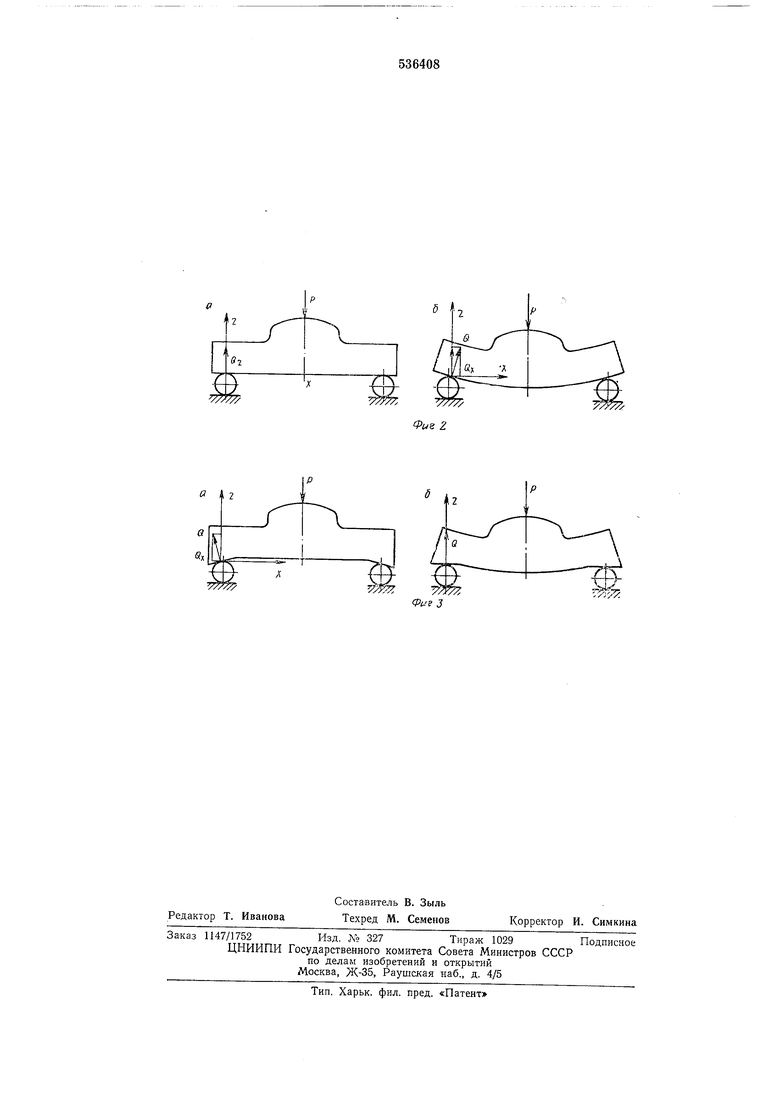
На фиг. 1 схеМ(атично изображено предлагаемое устройство; на фиг. 2 - действие сил Ilia упругий элемент у нзвестиого датчика при мнни-мальной и максимальной из.мер|Яемых счлах; на фиг. 3 - действие сил «а упругий эле.мепт у лредлагаамого датчика.
Датчик состоит из мембранного упругого элемента /, корпуса 2, .круговой шарНКовой оноры 3, рабочих тензорезисторов 4, грузовоспринИМающего выступа 5 упругого элсимента, опорной поверхности 6 упругого элемента, опорной поверхности 7 корпуса.
Элемент / представляет собой пластипу, «а одной плоскости которой раЗ|Мещен грузовосприни:маюид,ий выступ 5, а .на другой - стойки с закрепленными на них рабочамл тензорезисторами 4 и опорная поверхность 5 с углом скоса а. Упругий элемент с рабочими тензорезисторами поверхностью 6 опирается на кр;уговую шариковую опору 3, размещенную на опорной поверхности 7 корпуса 2.
Датчик работает следующим образо.м. Под действием измеряемого усил-ия Р упругий элемент / из гибается относительно шариковой опоры 3 и растягивает рабочие тензорезисторы, за.креплепные «а упругом элементе, пропорцно1нально приложенному усилию.
На фиг. 2 показано действие сил ла упругий элемент у датчика прототняа при минимальной (фиг. 2а) И магксимальной (фиг. 26) измеряемой силе Р. Из схемы видно, что с увеличением измеряемой силы появляется
таегендлальная составляющая сила O.v, которая с увеличением измеряемой силы увеличивается и уменьшает изгибающий .момент упругого элемента.
На фиг. 3 а и 3 б показано действие сил на упругий элемент у предлагаемого датчика. Из схемы видно, что с увеличениеиМ из,меряемо11 силы тадгеициальная составляющая уменьшается. Это приводит к тому, что на упругий элемент .практически действует постоянная составляющая, значительно меньшая по велнчине, чем у известного датчиа а.
Такое выполнение датчика повышает точность измерения и устойчивость упругого эле мента к воздействию поперечных усилий.
Формула изобретения
Силоизмерительный тензорезпсториый датчик содержащ.ий корпус с раз1мещенным в нем на шар.иасовой круговой опоре мембранНЫ.М упругим элементом с тензорезисторами, отличающийся тем, что, с целью по вышения ТОЧ.ИОСТИ измерения и увеличения устойчивости датчика к поперечным усилия м, ь .нем опорные поверхности упругого элемеит и корпуса образуют между собой угол, величина (Которого лежит в пределах 30-5°, а опорная поверхность корпуса с горизонталью образуют угол в пределах О-3°.
Источники информации, принятые во внимание при экспертизе:
1. Авторское свидетельство № 324514, М. Кл.2 G 01 L 1/04 за Г968 г.
2. Авторское свидетельство № 363879, iVl. Кл.2 G 01 L 23/18 за 1966 г. (прототип).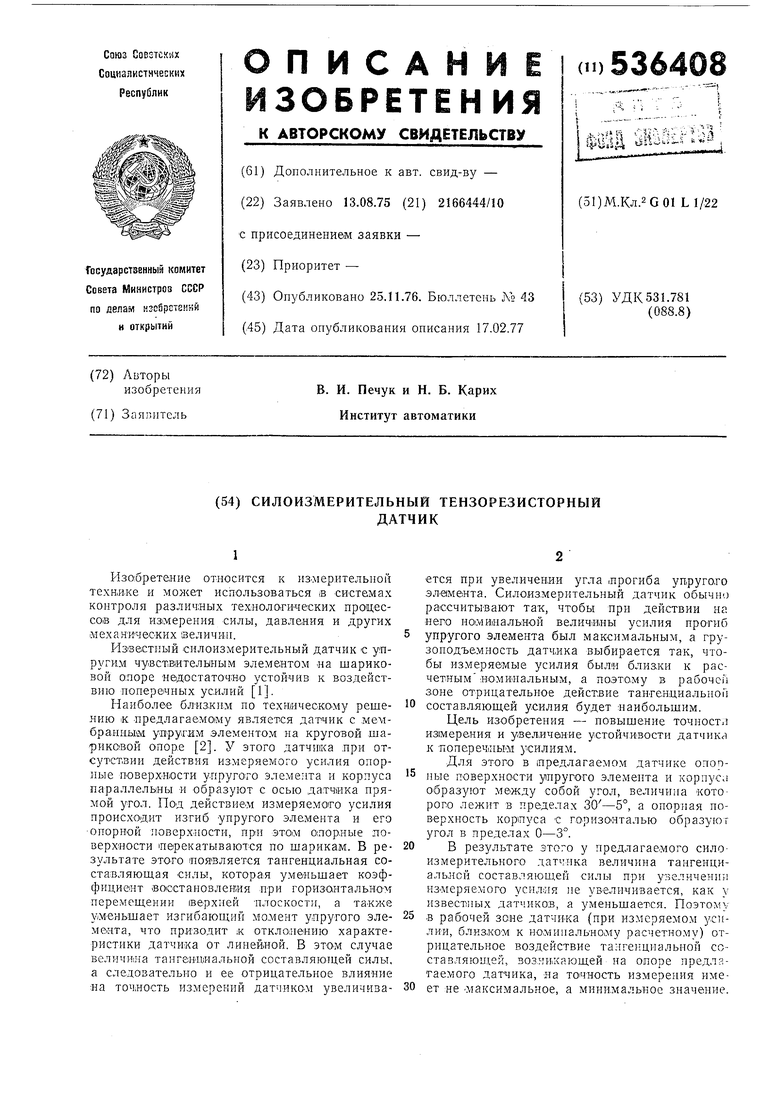
| название | год | авторы | номер документа |
|---|---|---|---|
| Силоизмерительный тензорезисторный датчик | 1973 |
|
SU495563A1 |
| ДАТЧИК СИЛЫ | 1992 |
|
RU2069326C1 |
| ДАТЧИК КОНТАКТНОГО ДАВЛЕНИЯ | 2004 |
|
RU2293295C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДЕФОРМАЦИЙ И СИЛ | 1991 |
|
RU2010155C1 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ГРУЗОВ НА КРАНАХ | 1992 |
|
RU2069320C1 |
| Силоизмерительный датчик | 1972 |
|
SU613218A1 |
| ЭЛЕКТРОННЫЕ ТЕНЗОВЕСЫ | 1993 |
|
RU2044283C1 |
| Трехкомпонентный датчик перегрузки | 1982 |
|
SU1092413A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСИЛИЙ | 1995 |
|
RU2111463C1 |
| СПОСОБ УПРАВЛЕНИЯ КУРСОРОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2275674C2 |