0(П
./ е
СО
гt(г6i
Изобретение относится к i;:j-ie ,)i ; тсх--икО; а имегЕно к лагсика; ;. предназначенным для измерения liupcrpyaoK-ycKvOpCHHH „
Изнестен однококгюнеьпный дпт1-1ик перегрузки, содержапмй груз, с:се ненггый с корпусом посредством yntjy;ого элемента с наклгенны тс :т;резисторами f1j„
Недостатком этого датчике repni-рузки яв;;яется 1евозмож:- :ость liSMepeiinn Других составляющих вектора leptMjiy:-;ки--ускорения.
Наиболее близким по гехнической сущности к предлагаемому является датчик, содержатий груз, соедини -пы с кopпyco s посредством упругого э.пемента, с расположенными пз нем :-ечзг;
резисторами 2j,
Недостатком этого датчика яв.ляет-ся узкий диапазон эксплуатации, обу,:лоиленный разнодиапазож сстью нзкер ;ния компонентов 3 -ITO существенио снижает точность измерения
Цель изобретения - расшт-репие диапазона эксплуатац1- Н л iruвьш;ение точности изм1-;ре 1ИЙ ;
Зказачная :дель дос игае1 ся г;:м, что в даТ- ике,, содержацем г-руз, соединенный с корпусом иосредство 4 упругого злемента с сензорсзисторам ; упругт-тй элемент выполнен Б виде тра; криволннейнглх балок „ леказцгх па о.ггной поверхности и охватывающих груз по контуру, две лз которых, крайниераспололсены симметрично относитель
но центральной с nonepc4::ia-го сечения больп еЙ5 чем у крайних балок, при этом угол охгЕата vpy;ja балками образовал плс1скс стямк,, гро ходящими через точки крегглснкя (Залок в местах их соединения с корпус;;.м и грузом и пересекаюц имися н цсз;; р ; тяжести груза5 и составл:яег больгк;: 90 С, а тензорезисторы размеп1ень: на пактральной балке в кастах пересечения оси балки с двумя )ззаимно яер-пендикулярными осями,, проходягцими через центр тяжести груза,, а на крайних балках - в местах за,делки балсп-.к корпусу и к грузу.
На фиг. 1 изображен трехломг он€;нтный датчик перегрузки с кризолинейHbiMii балками, составленными из плоских пластин, связа.ргных жесткой nei:ie мычкой, и охватывающими груз в Еи;;;е пара,плелепипеда| на фиг, 2 - варис-нт вынолнения трехкомпонентного датчика
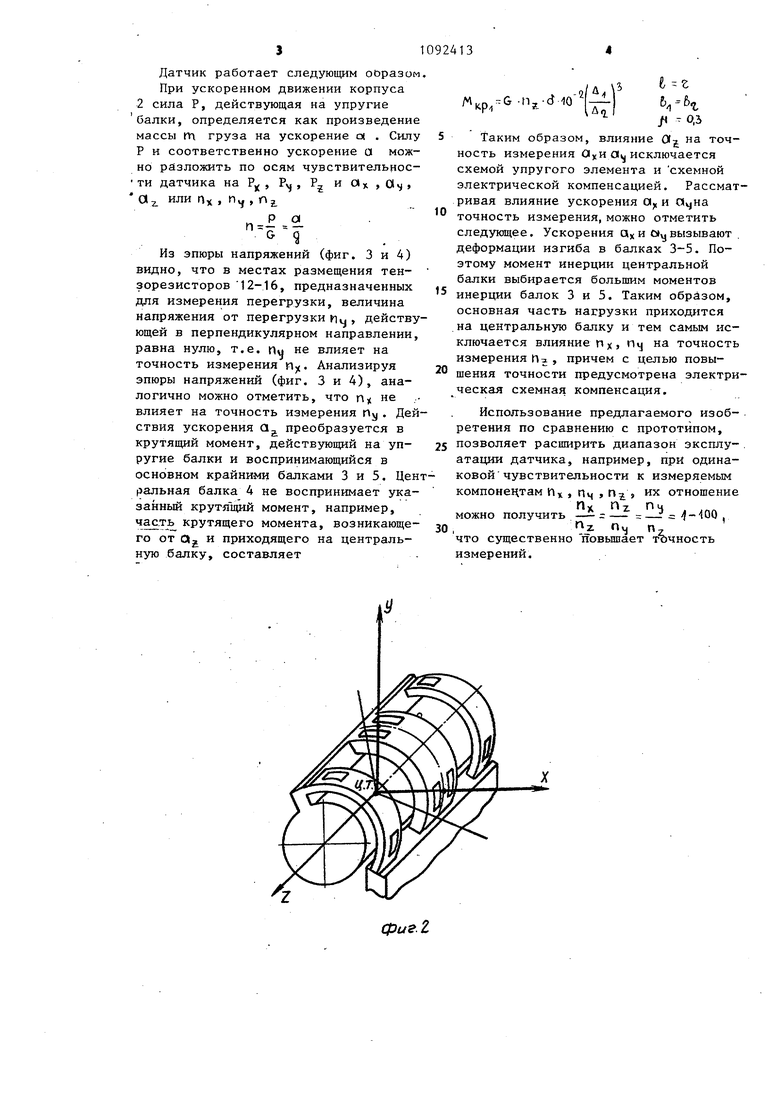
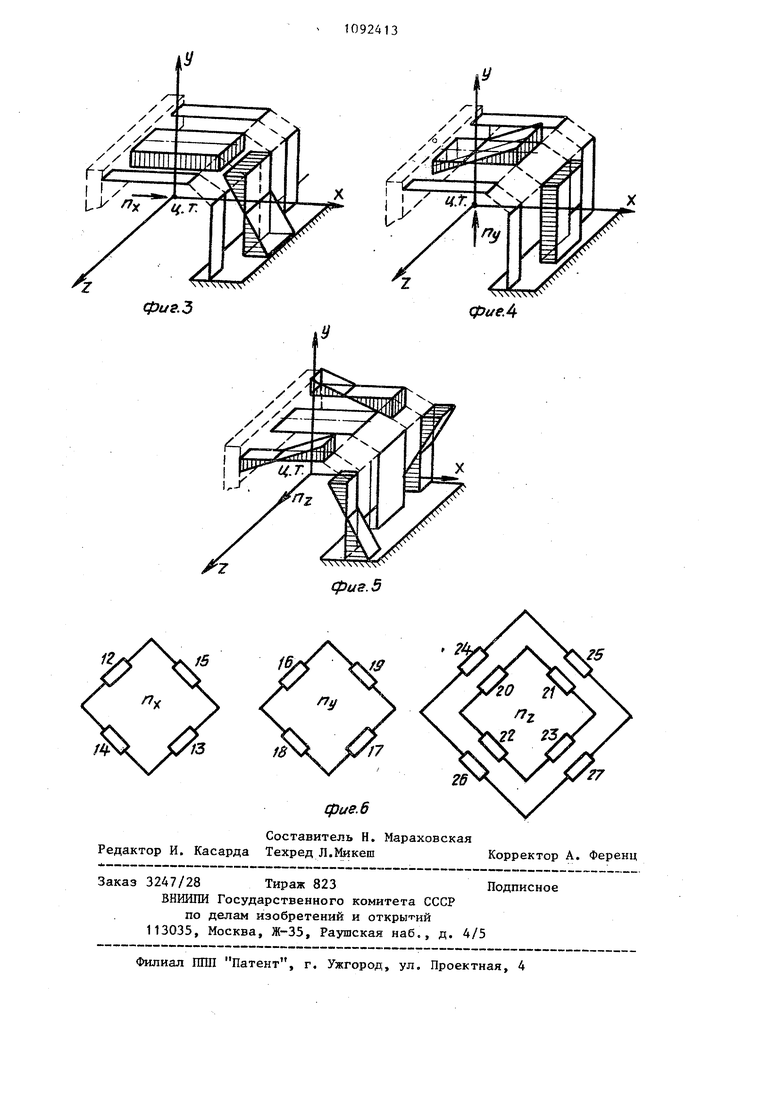
..i С.. кри;;;;:1инейными балками, охг ать:г;а|.:1П1Нл:и груз а виде нилинд;)а; на фи , ; - -iMiiopa нормальных нап якк} т и | ба:)ках от действия соС: ;н,.Ц1 ri ; ;ia (piny 4 эпюра и:)рма;п1нь;х чапряже} ий й- jia балках действия составляк.щей п с ; на фи: , : згпс})ы но1;маль:- ых капряжен1-;й V -,: к 1айних и эпюрь; кас,:те,:1 ьных напряжений на центральн;1Й банке О;- ,1ействия cocтa5J яющeй П Ни фиг. 6 - схемь включения тензорезгсторо;; „ I Тензорезисторы в скобках наклее;;:;, на обратной стороне балок; f-i., : Пц; П :У с:)С авл;(ю:цие - компонен7ы перегтзузки :
) ре }-:омпс: датчик перегрузки сод-З-Гоигг г-руз 1 „ соединенный с кораусом 2 П1:зсредством упругого элеМЕНта Гкнолпйчг-огс в виде трех криволннейгых балок 3-55лежащих на одной noiiepxi-iOCTH и охватьвающнх груз
1 По :;-а;:г:у.ру.. две балки 3 и 5 симметpr 4iiO ;л:спол же}1Ь ::ТТ1осительно центральной ба,;ки 1 5 момент i-нердии сет
иалок
и 5, Члс слостями б и 7, исходящими (:з це:-; ;-а плпкести (д,.) 1
и 1 ;ох;;лЯ Ц11Ми через очхк 8 и 9
кр2п.пе1п- Я ба:к)К к корпусу и к грузу ссэтвсч: узепно 5 образован угол 10 охв;1та груза балками, который больше 90, ;)сь Рсоо1)дккат (или чузствителы;осли) У и Y датчика криволинейной ба.г к:ч 4, ггричем начало коордиг-ат coв ieIдc;o с (у т „ груза, а сами оси ориент:-i: овалы внутри угла 10 охвата Тензоре: зисторы 12--15 и 16-19 для измер;-:; - И1 перегрузок здоль осей X иУ наклесш- Fia лeитpaJi;ьнoй балке н точках пересечения oci-; 10 двумя лергенд}гку,лярными К и Y „ Именно Е зтгтх точках имеют место макси™
b a- i:i:;bie :1апрякения и соответствующий им максу.-а.льный вь:ходной сигнал, поэтo y угол 10 груза выбирается боль. 90, т,е, больше угла разме1кекня те.тз(:фазистаров „ На крайних
балКах п местах заделки балок к корпусу и ; грузу наклеены тензорезисторы 20-23 я предназначенные для изм;г: ения перегрузки ГЬ.,, в направ.пении оси 2: перпендикулярной осям
X. и Y. Текзорезнстсры включены
в п,печи 1-;змерите,.льнь.;х мостов. Причем для измерения перегрузки П;.можко использовать тензорезисторы 20-23 или /4-27..
Датчик работает следующим оьразом.
При ускоренном движении корпуса 2 сила Р, действующая на упругие балки, определяется как произведение массы m груза на ускорение а . Силу Р и соответственно ускорение а можно разложить по осям чувствительности датчика на Р , PVJ , Р и а ,i , а . ,
015 или , ,
„ Р d
-г;
Из эпюры напряжений (фиг. 3 и 4) видно, что в местах размещения тек- зорезисторов 12-16, предназначенных для измерения перегрузки, величина напряжения от перегрузкиПи, действующей в перпендикулярном направлении, равна нулю, т.е. Пи не влияет на точность измерения nj(. Анализируя эпюры напряжений (фиг. 3 и 4), аналогично можно отметить, что П)( не влияет на точность измерения п( . Действия ускорения Qg. преобразуется в крутящий момент, действующий на упругие балки и воспринимающийся в основном крайними балками 3 и 5. Центральная балка 4 не воспринимает указанный крутящий момент, например, часть крутящего момента, возникающего от Q и приходящего на центральную балку, составляет
-2
-n,-d 10
Ь.-6ч
кр,&
1 1
AI 0,5
Таким образом, влияние 01 j на точность измерения а,(И 01 исключается схемой упругого элемента и схемной электрической компенсацией. Рассматривая влияние ускорения а и точность измерения, можно отметить следующее. Ускорения Ох и вызывают деформации изгиба в балках 3-5. Поэтому момент инерции центральной балки выбирается большим моментов 5 инерции балок 3 и 5. Таким образом, основная часть нагрузки приходится .на центральную балку и тем самым исключается влияние Пх Пц на точность измерения П причем с целью повы0шения точности предусмотрена электрическая схемная компенсация.
Использование предлагаемого изобретения по сравнению с прототипом, 25 позволяет расширить диапазон эксплуатации датчика, например, при одинаковой чувствительности к измеряемым компонентам Пх,Пч, их отношение Пх Пх П
--Г ,
МОЖНО получить
Ovj n
30 , -f. M 7
что существенно повышает точность измерений.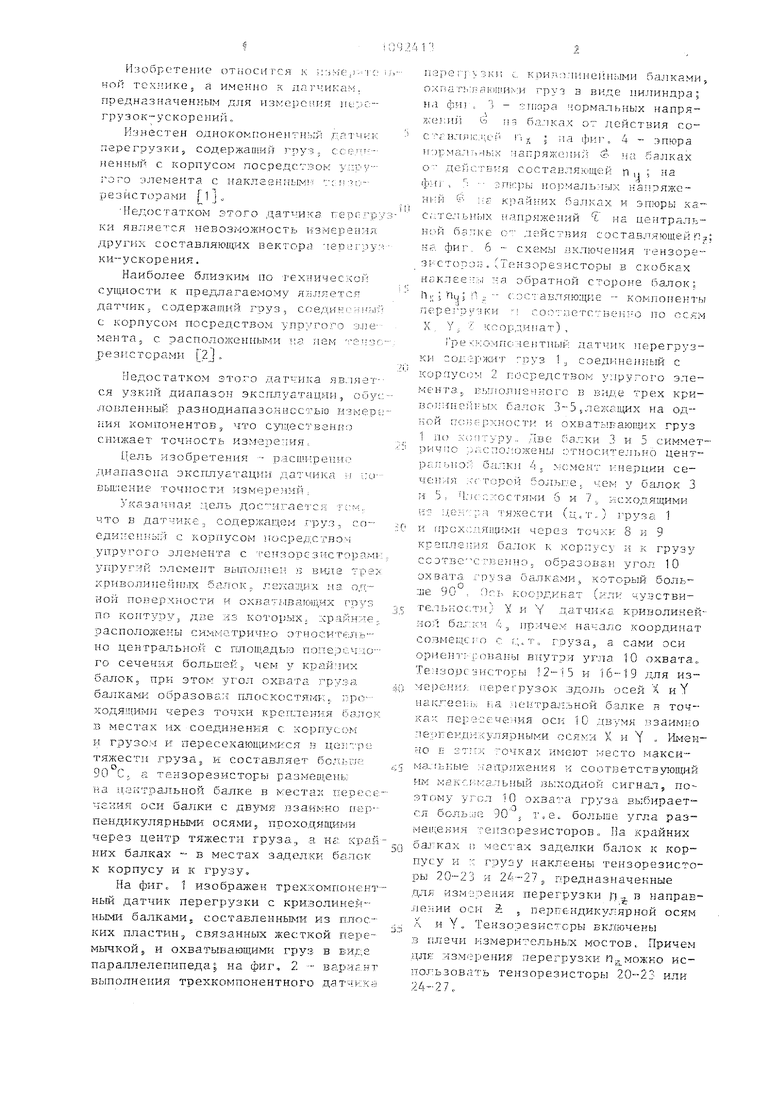
| название | год | авторы | номер документа |
|---|---|---|---|
| Многокомпонентные тензометрические весы | 2019 |
|
RU2717746C1 |
| Устройство для измерения составляющих векторов аэродинамической силы и момента | 2017 |
|
RU2657340C1 |
| ТЕНЗОАКСЕЛЕРОМЕТР | 2008 |
|
RU2382369C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПРОГИБОВ БАЛОК | 2013 |
|
RU2533343C1 |
| ДИНАМОМЕТРИЧЕСКИЙ ЭЛЕМЕНТ | 2009 |
|
RU2396533C1 |
| МНОГОБАЛОЧНЫЙ АКСЕЛЕРОМЕТР ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ ФИЗИЧЕСКОГО ТЕЛА И ЭЛЕКТРОННАЯ МОДЕЛЬ МНОГОБАЛОЧНОГО АКСЕЛЕРОМЕТРА | 2009 |
|
RU2390029C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1994 |
|
RU2126161C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК ТЕНЗОРЕЗИСТОРОВ | 1993 |
|
RU2063010C1 |
| ЭЛЕКТРОННЫЕ ТЕНЗОВЕСЫ | 1993 |
|
RU2044283C1 |
| МНОГОБАЛОЧНЫЙ АКСЕЛЕРОМЕТР - АНАЛИЗАТОР СПЕКТРА МЕХАНИЧЕСКИХ КОЛЕБАНИЙ НА ОСНОВЕ ТЕНЗОРЕЗИСТИВНЫХ ПРЕОБРАЗОВАТЕЛЕЙ | 2008 |
|
RU2387999C1 |
ТРЕХКОМПОНЕНТНЬЙ ДАТЧИК ПЕРЕГРУЗКИ, содержащий груз, соединенный с корпусом посредством упругого элемента с тензорезисторами, отличающийся тем, что, с целью расширения диапазона и повышения точности измерений, упругий элемент выполнен в виде трех криволинейных балок, лежаитих на одной поверхности и охватывающих груз по контуру, две из которых, крайние, расположены симметрично относительно центральной с площадью поперечного сечения большей, чем у крайних балок, при этом угол охвата груза балками образован плоскостями, пpoxoдящIiми через то11ки крепления балок в местах их соединения с корпусом и грузом и пересекающимися в центре тяжести груза, и составляет больше 90 , а тензорезисторы размещены на централь- с о ной балке в местах пересечения оси балки с двумя взаимно перпендикулярными осями, проходящр ми через центр тяжести груза, а на крайних балках в местах заделки балок к корпусу и к грузу.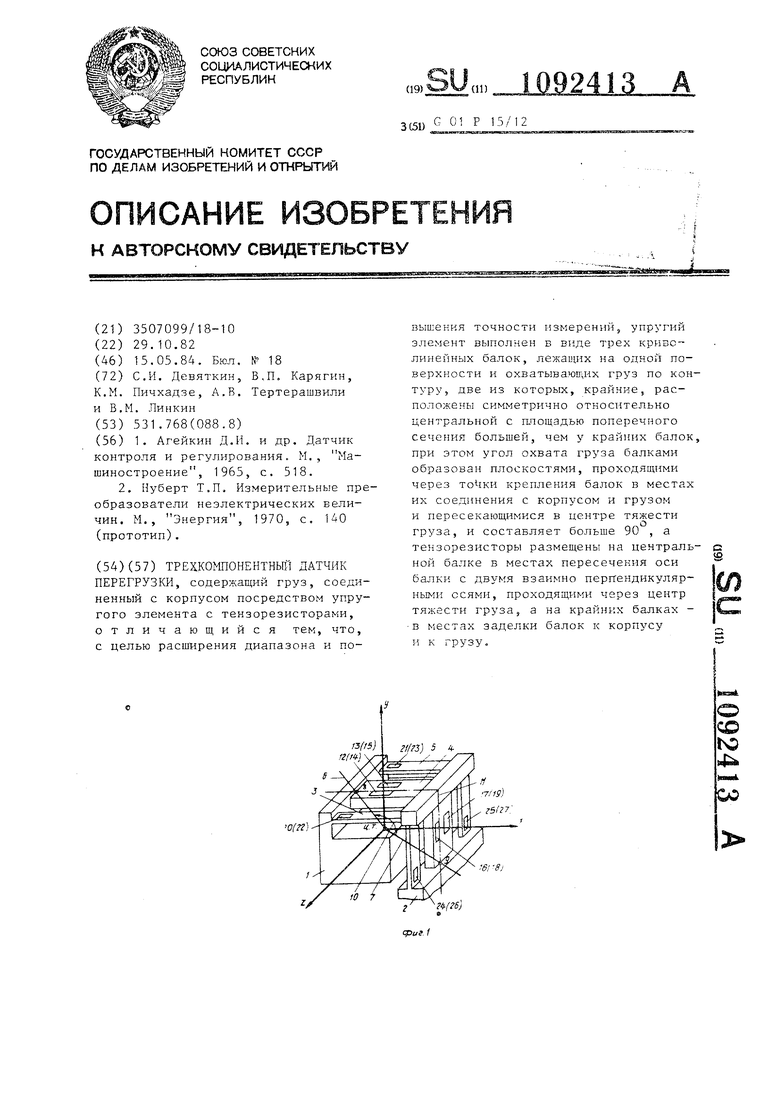
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Агейкин Д.И | |||
| и др | |||
| Датчик контроля и регулирования | |||
| М., Машиностроение, 1965, с | |||
| Способ и машина для приготовления в один прием линованной с обеих сторон вдоль и поперек бумаги | 1925 |
|
SU518A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Нуберт Т.П | |||
| Измерительные преобразователи неэлектрических величин | |||
| М,, Энергия, 1970, с, 140 (прототип). | |||
