1
Изобретение относится к сейсмометрии и предназначено для измерения механических параметров маятника вертикального сейсмометра.
Известны способы измерения параметров маятника вертикального сейсмометра путем прокачки на «ножах освобожденного от пружины маятника 1.
Однако точность определения параметров известным способом невелика и, кроме того, требует больнюго количества наблюдений.
В качестве прототипа предлагаемого способа припят способ измерения параметров маятника вертикального сейсмометра путем освобождения его от уравновешивающей иружины, закрепления на нем цилиндрического груза и определения по свободным колебаниям маятника приведенной длины и момента инерции
2.
Этот способ имеет принципиальный недостаток, заключающийся в том, что в нем не учитывается вес винтовой пружины, уравновешивающей маятник в горизонтальной плоскости. Тем самым обуславливается погрешность в определении параметров чувствительного элемента маятник-пружина, что приводит к спил-сепию точности выходных параметров сейсмометра.
Цель изобретения - повышение точности измерения пара.метров чувствительного элемента, что, в свою очередь, позволяет достичь более достоверных выходных параметров сейсмометра.
Это достигается тем, что ио предлагаемому способу между осью вращения маятника и шарниром пружины устанавливают дополнительный плоский стержень. Таким образо.м, создается эквпва.тентный iaятпик, параметры которого равны параметрам чувствительного элемента маятник-прул ;пна.
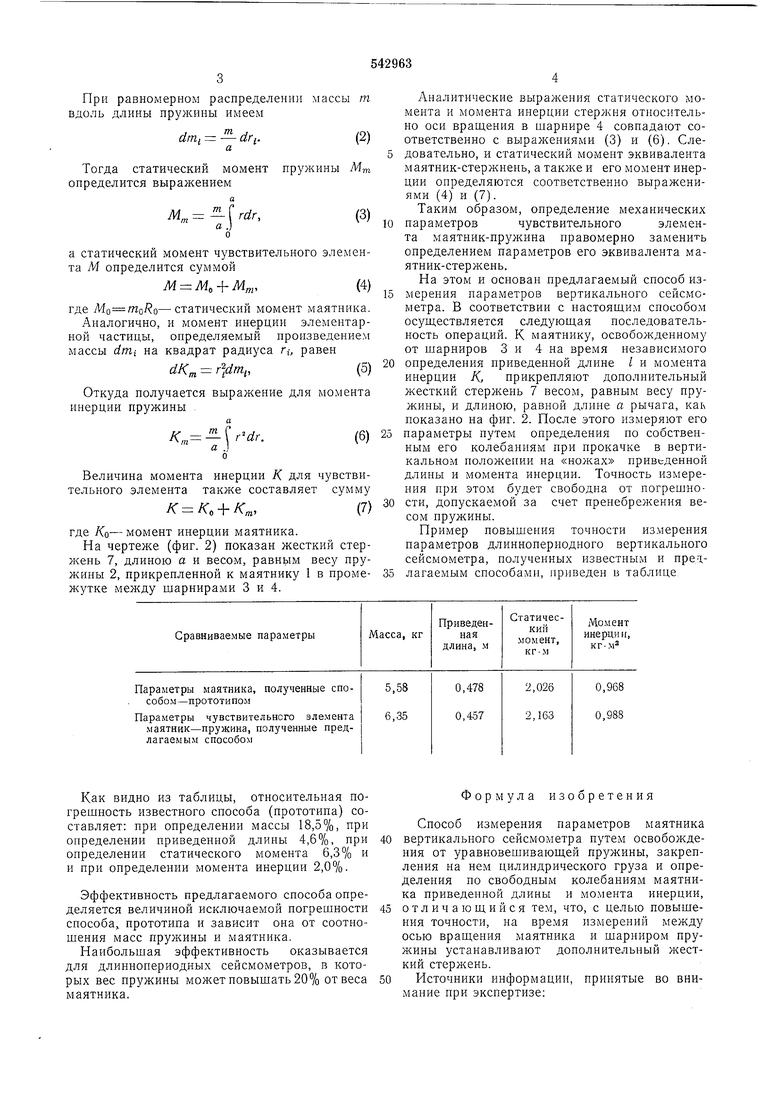
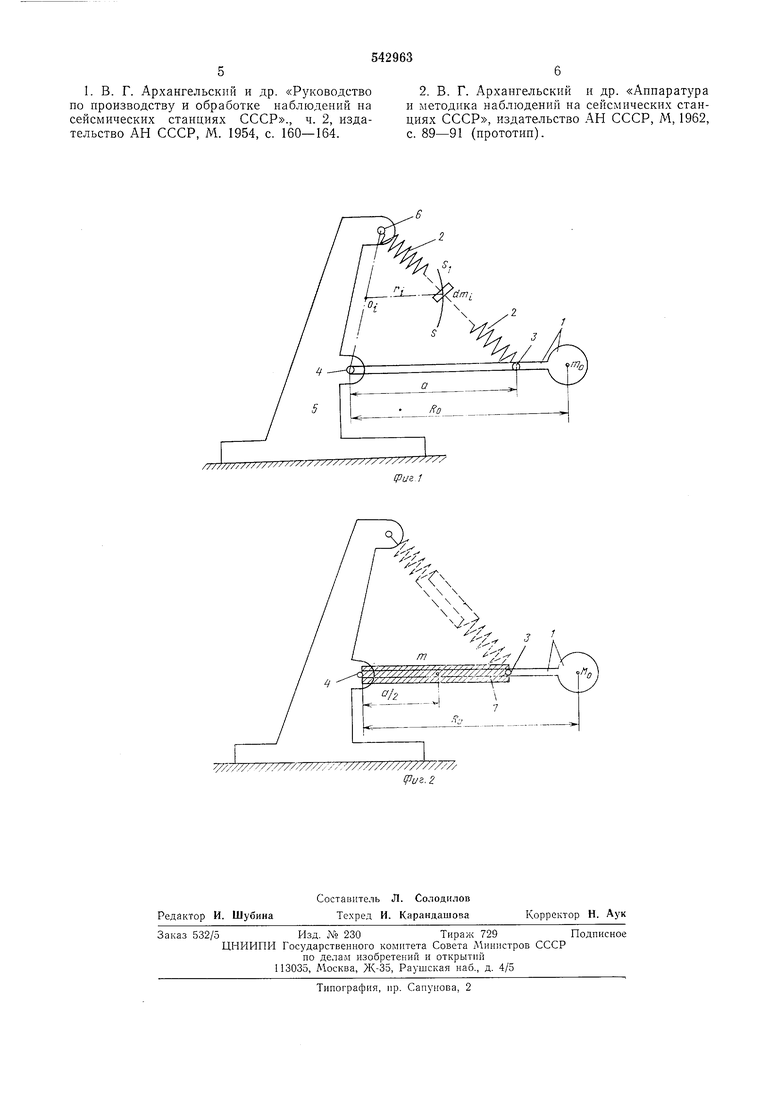
На фиг. 1 показана схема вертикальпого сейсмометра, а на фиг. 2 - маятник с доиолпительпым жестким стержнем.
Чувствительный элемент сейсмометра составляет маятник 1 с массой то и пружина 2 с массой т, скреплеппые между собою niapнпром 3, расположепным на расстоянии а от осп вращения шарнира 4, скрепляющей маятпик с неподвижной станиной 5, к которой ишрнпром 6 прикреплен второй конец прул{ииы2. Из чертел а па фиг. 1 видно, что при угловых поворотах маятника на угол т, каждая элементарная частица а/п,- перемеИ1,ается по дуге ssi па тот угол т, сохраняя неизменным радиус г, и центр дуги о,-.
При этих условиях статический момент элементарной частпцы, выралчающийся произведением массы па плечо равен
dM„ ridntf.
(1) При равномерном распределении массы т вдоль длины пружины имеем dm-i - dri. Тогда статический момент пружины Mm определится выражением , а . о а статический момент чувствительного элемента М определится суммой М М, + М„,,(4) где Мо яго/ о-статический момент маятника. Аналогично, и момент инерции элементарной частицы, определяемый произведением массы dnii на квадрат радиуса г,-, равен dK - ,(5) Откуда получается выражение для момента инерции пружины . К, . Величина момента инерции К для чувствительного элемента также составляет сумму + /С„,(7) где /Со-момент инерции маятника. На чертеже (фиг. 2) показан жесткий стерлсень 7, длиною а и весом, равным весу пружины 2, прикрепленной к маятнику 1 в промежутке между гиарнирами 3 и 4. 5 10 15 20 25 30 35 Аналитические выражения статического момента и момента инерции стержня относительно оси вращения в шарнире 4 совпадают соответственно с выражениями (3) и (6). Следовательно, и статический момент эквивалента маятник-стержнень, а также и его момент инерции определяются соответственно выражениями (4) и (7). Таким образом, определение механических параметровчувствительногоэлемента маятник-пружина правомерно заменить определением параметров его эквивалента маятник-стержень. На этом и основан предлагаемый способ измерения параметров вертикального сейсмометра. В соответствии с настоящим способом осуществляется следующая последовательность операций. К маятнику, освобожденному от шарниров 3 и 4 на время независимого определения приведенной длине I и момента инерции К, прикрепляют дополнительный жесткий стержень 7 весом, равным весу пружины, и длиною, равной длине а рычага, как показано на фиг. 2. После этого измеряют его параметры путем определения по собственным его колебаниям при прокачке в вертикальном положении на «ножах привьденной длины и момента инерции. Точность измерения при этом будет свободна от погрешности, допускаемой за счет пренебрежения весом пружины. Пример повышения точности измерения параметров длиннопериодного вертикального сейсмометра, полученных известным и прет,лагаемым способами, приведен в таблице
| название | год | авторы | номер документа |
|---|---|---|---|
| Длиннопериодный вертикальный сейсмометр | 1986 |
|
SU1543359A1 |
| Длиннопериодный вертикальный сейсмометр | 1982 |
|
SU1094002A1 |
| Длиннопериодный горизонтальный сейсмометр | 1978 |
|
SU673948A1 |
| Способ определения параметров горизонтального сейсмометра | 1983 |
|
SU1116404A1 |
| Устройство для арретирования маятника скважинного длиннопериодного сейсмометра | 1976 |
|
SU568923A1 |
| Способ определения параметров маятника горизонтального сейсмометра | 1980 |
|
SU1057909A1 |
| Вертикальный сейсмометр | 1981 |
|
SU989499A1 |
| Способ защиты от вибрации и устройство для его осуществления | 2017 |
|
RU2669914C2 |
| Длиннопериодный вертикальный сейсмометр | 1977 |
|
SU712790A1 |
| Длиннопериодный вертикальный сейсмометр | 1978 |
|
SU763827A1 |
Как видно из таблицы, относительная погрешность известного способа (прототипа) составляет: при определении массы 18,5%, при определении приведенной длины 4,6%, при определении статического момента 6,3% и и при определении момента инерции 2,0%.
Эффективность предлагаемого способа определяется величиной исключаемой погрешности способа,, прототипа и зависит она от соотношения масс пружины и маятника.
Наибольшая эффективность оказывается для длиннопериодных сейсмометров, в которых вес пружины может повышать 20% отвеса маятника.
Формула изобретения
Способ измерения параметров маятника вертикального сейсмометра путем освобождения от уравновешивающей пружины, закрепления на нем цилиндрического груза и определения по свободным колебаниям маятника приведенной длины и момента инерции, отличающийся тем, что, с целью повышения точности, на время измерений между осью вращения маятника и шарниром пружины устанавливают дополнительный жесткий стерл ень.
Источники информации, принятые во внимание при экспертизе:
////////////
