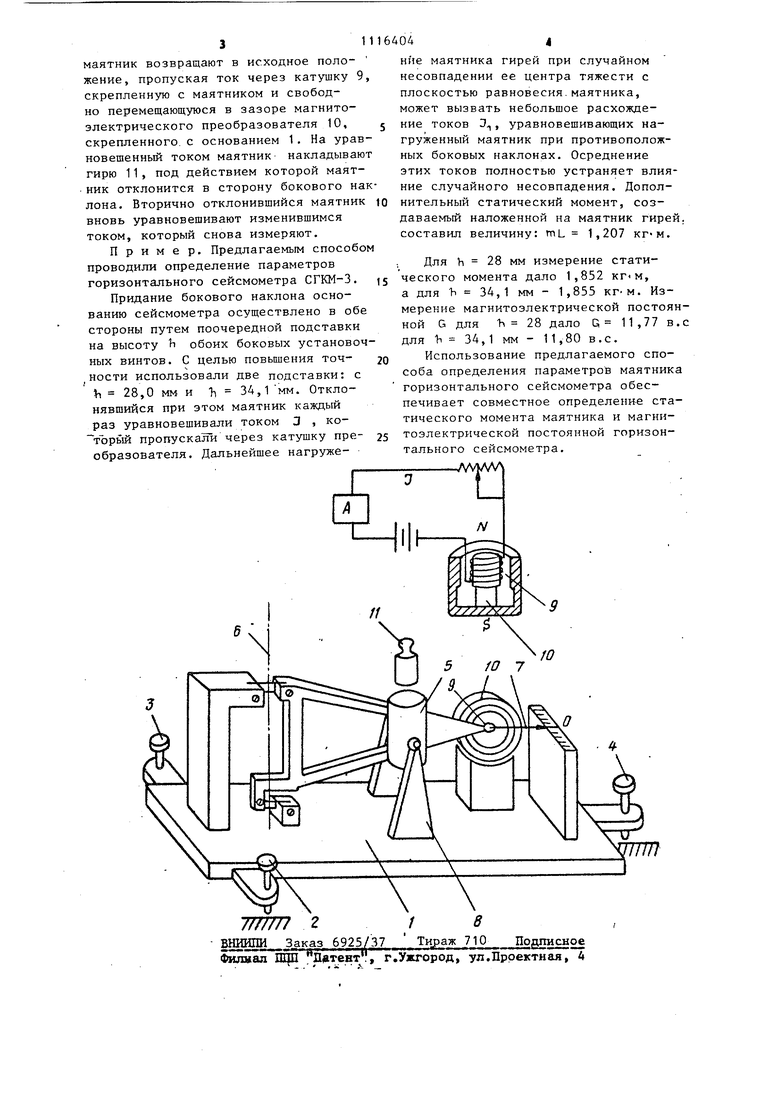
Изобретение относится к геофизическим методам исследований, а более KofiKpiSTHo - к сейсмометриг еским наблюдениям, проводи шм на сейсмических станциях, и может быть исполь зовано при контрольньх определениях параметров сейсмографов. Известен способ определения статического момента маятника горизонтального сейсмометра путем отделения маятника от сейсмометра, установки его на опорах посредством прокачных ножей, приведения его в режим свободных колебаний, определения периода свободных колебаний, изменения оси колебания маятника и определения измененного периода колебаний, определения приведенной длины и статического момента маятника 11. Известный способ обладает большой трудоемкостью, требует вь сокой квалификации при изготовлении и монтаже прокачных ножей, приводит к перерыву в регистрации сейсмосигнало на время контроля в течение 2-3 дне Наиболее близким техническим решением к предлагаемому является способ определения параметров горизонтального сейсмометра, включающий уравновешивание его маятника,придание основанию сейсмометра бокового наклона, подачу тока в рабоч то катушку сейсмометра, уравновешивание маятника сейсмометра путем изменения тока в рабочей катушке измерение силы тока и определение магнитоэлектрической постоянной сейсмометра. При этом в расчетную формулу входят статический момент маятника МР или момент инерции К и приведенная длин маятника Г 2. Недостатком данного способа является необходимость независимого опре деления статического момента маятника Л1Р,.или его момента инерции К и приведен}юй длины & маятника одним из известных способов. Цель изобретения - расширение функциональных возможностей способа путем обеспечения возможности совместного определения магнитоэлектри ческой постоянной и статического момента маятника сейсмометра. Поставленная цель достигается тем. что в способе определения пара метров горизонтального сейсмометра, включающем уравновешивание его маят ка, придание основанию сейсмометра бокового наклона, подачу тока в рабочую катушку сейсмометра, уравновешивание маятника путем изменеНИН тока в рабочей катушке сейсмометра, измерение силы тока и определение магнитоэлектрической постоянной сейсмометра, после придания основанию сейсмометра бокового наклона и уравновешивания маятника током, нагружают маятник дополнительным грузом,уравновеЕ1Ивают маятник путем изменения тока в рабочей катушке сейсмометра, после чего определяют статичес,; кий момент маятника MR и-магнитоэлектрическую постоянную сейсмометра V по формулам: где m L - статический момент, (Создаваемый дополнительным грузом m, центр тяжести которого расположен на расстоянии L от оси вращения маятника; И - ток, уравновешивающий ненагруженный маятник, при боково наклоне основания сейсмометра; D - ток, уравновешивающий нагруженный маятник, при том же боковом наклоне; - ускорение свободно падающего тела; V - угол бокового наклона основания сейсмометра. На чертеже схематически изображен горизонтальный сейсмометр. Горизонтальный сейсмометр содержит основание 1, опирающееся на три установочных винта, два из которых - 2 и 3 - боковые, а третий установочный винт 4 - осевой. Маятник 5 уравновешен в вертикальной плоскости, проходящей через его ось 6 вращения маятника. Положение равновесия маяттшка фиксируют совпадением указателя 7 с нулем неподвижной шкалы. Для совместного определения статического момента маяттп ка и магнитоэлектрической постоянной сейсмометра основанию сейсмометра придают наклон на угол Ц. В результате бокового наклона маятник отклонится от положения равновесия и обопрется на боковой упор 8. Отклонившийся
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения параметров маятника горизонтального сейсмометра | 1980 |
|
SU1057909A1 |
| Длиннопериодный вертикальный сейсмометр | 1977 |
|
SU712790A1 |
| Сейсмометр | 1977 |
|
SU651283A1 |
| Электронный сейсмометр | 1987 |
|
SU1518816A1 |
| Сейсмонаклономер | 1984 |
|
SU1246033A1 |
| Способ взвешивания и устройство для его осуществления | 1988 |
|
SU1606870A1 |
| Сейсмограф | 1986 |
|
SU1409954A1 |
| Поплавковый плотномер | 1978 |
|
SU785686A1 |
| Способ измерения параметров маятника вертикального сейсмометра | 1974 |
|
SU542963A1 |
| Многомаятниковый сейсмометр | 1983 |
|
SU1117551A1 |
СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ГОРИЗОНТАЛЬНОГО СЕПСМОМЕТРА, включающий уравновешивание его маятника, придание основанию сейсмометра бокового наклона, подачу тока в рабочую катушку сейсмометра, уравновешивание маятника путем изменения тока в рабочей катушке сейсмометра, измерение силы тока и определение магнитоэлектрической постоянной сейсмометра, отличающийся тем, что, с целью расширения функциональных возможностей-способа путем обеспечения возможности совместного определения магнитоэлектрической постоянной и статического момента маятника сейсмометра, после придания основанию сейсмометра бокового наклона и уравновешивания маятника током, нагружают маятнУ1к дополнительным .грузом, уравновешивают маятник путем изменения тока в рабочей катушке сейсмометра, после чего определяют статический момент маятника МКд и магнитоэлектрическую постоянную сейсмометра G по формулам MVfH , ffmL G -:;-rr Sin V, j с € где hiL - статический момент, создаваемый дополнительным грузом га , центр тяжести которого расположен на расстоянии L от оси вращения маятника; J - ток, уравновешивающий ненагругкенньй маятник, при боковом наклоне основания сейсмометра; J - ток, уравновешивающий нагруженный маятник, при том же боковом наклоне; g- - ускорение свободно падаюше413. го тела; V - угол бокового наклона основания сейсмометра.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппаратура и методика сейсмометрических наблюдений в СССР | |||
| Под ред | |||
| З.И | |||
| Арановича и др | |||
| М., .Наука, 1974, с | |||
| Аппарат для электрической передачи изображений без проводов | 1920 |
|
SU144A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппаратура и методика сейсмометрических наблюдений в СССР | |||
| Под редакцией З.И | |||
| Арановича | |||
| М., Наука 1974, с | |||
| Счетная линейка для вычисления объемов земляных работ | 1919 |
|
SU160A1 |
