Изобретение относится к способам и устройствам виброзащиты объектов, в частности, прецизионных навигационных приборов и гравиметров.
Известны способы гашения колебаний за счет использования различных фрикционных или слоистых материалов (например, листовую сталь, мембраны) [1, 2].
Недостаток их - в малой эффективности виброзащиты из-за узкополосности диапазона частот его работы.
Известен также способ активной виброзащиты, реализованный в устройстве [3] и состоящий в том, что измеряют угловые ускорения амортизируемого объекта (платформы), фильтруют и обрабатывают (сдвигают по фазе) сигналы с выхода угловых акселерометров и заводят в качестве отрицательной обратной связи на входы воздействующих механизмов, выполненных, например, в виде электромагнитных толкателей или датчиков моментов.
Недостатком этого способа является малая эффективность защиты от вибрации, обусловленная жесткостью амортизатора и взаимным влиянием угловых движений основания на поступательное движение платформы.
Наиболее близким по решению к предлагаемому способу по технической сущности и достигаемому результату является активный управляемый амортизатор, описанный в [4], принятый за прототип.
Сущность известного способа-прототипа амортизации заключается в определении и установлении расчетной жесткости упругой связи, обеспечивающей минимум амплитуды вынужденных колебаний горизонтального управляемого амортизатора в условиях гармонических поступательных и угловых вибраций основания.
Эта цель достигается в частности тем, что измеряют отношение амплитуд колебаний амортизируемого объекта (платформы) к смещениям основания; определяют оптимальную жесткость упругой связи при данной частоте вибрации основания и устанавливают ее с помощью исполнительного элемента электродинамического типа (например, в виде электромагнитных толкателей).
Недостаток известного способа и реализующих его устройств заключается в низкой эффективности защиты от вибраций, обусловленной узкополосностью его действия (от 1 Гц до 10 Гц), а также сложностью технической реализации при случайном характере воздействий.
Целью изобретения является повышение эффективности защиты от вибрации за счет расширения диапазона частот подавления внешнего воздействия виброускорений, даже при их случайном характере.
Технический результат - создание способа эффективного подавления влияния вибрации основания в широком диапазоне частот и разработка амортизатора, реализующего предложенный способ.
Поставленную задачу и указанный технический результат достигают тем, что используют колебательную систему с двумя степенями свободы, например, горизонтальную маятниковую систему, в которой связывают маятники упруго-демпфирующими связями с возможностью начальной настройки и выставки параметров в статике; при этом маятники связывают по дифференциальной схеме и, с целью повышения эффективности защиты от вибраций в широком диапазоне частот, устанавливают отношение между жесткостями упруго-демпфирующих элементов согласно условию:

где: c1, 2 - результирующие жесткости упругих элементов маятников;
 и
и  - маятниковые моменты подвижных колебательных элементов.
- маятниковые моменты подвижных колебательных элементов.
Далее выставляют равными по величине начальные угловые отклонения маятников от плоскости горизонта, т.е. 
Затем, с целью защиты от влияний и горизонтальных линейных ускорений подвижного основания, начальные угловые статические отклонения маятников выставляют в плоскость горизонта, т.е.

Для расширения диапазона частот виброзащиты во всем диапазоне частот от 0 до ∞ возмущающих ускорений вибрации основания устанавливают также равными периоды собственных колебаний маятников, т.е.

По сравнению с прототипом заявляемый способ и реализующие его устройства имеют отличительную особенность в совокупности действий, в конструкции и в значении параметров, обеспечивающих осуществление способа.
Теоретическая основа предлагаемого способа защиты от вибрации изложена ниже.
Известно устройство защиты от вибрации [5], содержащее соединенный с защищаемым объектом жесткий стержень и прикрепленный перпендикулярно к стержню упругий элемент с установленной на нем массой в виде навинченной гайки. Наружная поверхность гайки имеет шероховатость и контакт с поверхностями пластин, связанными жестко с объектом и также имеющими шероховатость. Благодаря этому при вибрации постоянно возникает направленная вдоль оси стержня сила трения, демпфирующая колебания объекта.
Устройство имеет упрощенную конструкцию, однако оно не позволяет эффективно, в широком диапазоне частот, компенсировать влияние вибрации, особенно при случайном ее характере, и не способно стабилизировать в горизонте объект от наклонов, возникающих при вибрации.
Наиболее близким к предлагаемому решению по технической сущности и достигаемому результату является активное виброзащитное устройство [6], содержащее устанавливаемый на основание амортизатор с подвижным и неподвижным элементами, платформу, шарнир, размещенные на платформе амортизируемые объекты. Подвижные элементы связаны с неподвижными шарнирами и упруго-демпфирующими связями, образующими маятниковую систему с двумя степенями свободы и выполненную с возможностью настройки и регулировки параметров.
Недостаток известного устройства заключается в малой эффективности защиты от вибраций, обусловленной его узкополосностью действия (от 1 Гц до 10 Гц), а также сложностью технической реализации при случайном характере воздействий.
Техническим результатом, на достижение которого направлено предлагаемое изобретение, является повышение эффективности защиты от вибраций основания в более широком диапазоне частот возмущающего воздействия подвижного основания.
Для достижения этого технического результата маятники связаны по дифференциальной схеме, с возможностью совершать встречные колебания и, с целью повышения эффективности защиты от вибраций в более широком диапазоне частот, результирующие жесткости упруго-демпфирующих связей установлены по величине моментов пропорционально их маятниковости при равенстве нулю их начальных статических наклонов к плоскости горизонта и равенстве периодов собственных колебаний их маятников.
При этом, с целью защиты от влияний и горизонтальных ускорений подвижного основания, начальные статические отклонения маятников выставлены в плоскость горизонта, т.е.  и
и 
Проведенный патентный анализ уровня техники позволил установить в просмотренных аналогах отсутствие совокупности признаков, тождественной заявляемому техническому решению.
На фиг. 1 изображена принципиальная схема предлагаемого способа амортизации, где: ϕ1, ϕ2 - угловые отклонения маятников от плоскости горизонта; 
 - маятниковые плечи (стержни); m1, m2 - результирующие приведенные массы, расположенные в центрах масс маятников; с1, с2 - результирующие жесткости упругих элементов.
- маятниковые плечи (стержни); m1, m2 - результирующие приведенные массы, расположенные в центрах масс маятников; с1, с2 - результирующие жесткости упругих элементов.
На фиг. 2 представлен один из вариантов устройства в качестве конструктивно-технической реализации способа.
Предлагаемое виброзащитное устройство в виде упругого скомпенсированного амортизатора (УСА) содержит устанавливаемый на основание 1 амортизатор с подвижными элементами (наружной 2 и внутренней 3 рамками) и с платформой 4 для размещения объекта 5, образующими горизонтальные маятники с шарнирными опорами 6 и с маятниковыми моментами  и
и 
Для начальной выставки УСА используется система астазирования с помощью упругих элементов 7 и пузырьковые уровни 8. Для грубой стабилизации по крену основания 1 может быть использована силовая следящая система индукционного типа 9 или длиннопериодный физический маятник.
При транспортировке в нерабочем состоянии необходимо использовать в УСА систему арретирования 10 наружной 2 и внутренней 3 рамок.
УСА работает следующим образом.
Вертикальные составляющие линейных ускорений вибрации основания 1 будут вызывать угловые отклонения обоих маятников относительно плоскости горизонта равными по величине, но противоположными по направлению. Платформа 4 будет совершать также поступательные перемещения, но дифференциальная схема построения УСА, а также выбор и настройка параметров маятниковых систем согласно условию (1), позволяет добиться такого эффекта, что углы отклонения от плоскости горизонта внутренней рамки 3 и платформы 4 равны по величине и противоположны по направлению отклонениям наружной рамки 2.
Следует заметить, что горизонтальные линейные ускорения поступательного движения будут скорее стабилизировать рамки 2 и 3 в плоскости горизонта, т.к. при этом нагрузка будет восприниматься и компенсироваться в шарнирных опорах, Важно только, чтобы объект 5 с платформой 4 и распределение масс рамок были сбалансированы относительно горизонтальных ускорений.
Таким образом, результирующее угловое отклонение от плоскости горизонта амортизируемого объекта 5 будет отсутствовать. Платформа 4 сохраняет угловую ориентацию относительно плоскости горизонта.
За счет дифференциальной схемы построения колебательной системы амортизатора горизонтальные составляющие линейных ускорений будут компенсироваться.
При больших наклонах подвижного основания 1 (>4°-5°) целесообразно использовать грубую стабилизацию основания 1 от гировертикали, либо с помощью длиннопериодного физического маятника, каковым может являться УСА, с системой активного или пассивного демпфирования колебаний.
Следует заметить, что благодаря настройке периодов собственных колебаний маятников 2 и 3 равными, компенсирующие эффекты будут происходить у маятников синхронно, во всем диапазоне частот.
Поведение скомпенсированного амортизатора УСА было теоретически исследовано и проведено компьютерное моделирование. Результаты исследования доказали практическую реализуемость предлагаемого способа и его надежное функционирование.
Теоретическое обоснование способа выражается в определении параметров колебательной системы, представленной на фиг. 1, и, в частности, - постоянной времени, равной периоду собственных колебаний маятникового звена УСА.
Относительно выбранной неподвижной системы координат 0xyz (0 - точка положения статического равновесия) координаты центров масс грузов m1 (x1, y1, z1), m2 (x2, y2, z2) будут:

Кинетическая энергия системы равна:

где J1 и J2 - моменты инерции стержней  и
и  вокруг осей подвеса, соответственно равные:
вокруг осей подвеса, соответственно равные:

Таким образом,

Потенциальная энергия системы будет: 

Тогда функция Лагранжа L=T-П будет равна:

где введено обозначение конструктивных параметров системы (моментов инерции):

Используя алгоритм Лагранжа, составим уравнения движения


Система нелинейных уравнений (9) может быть решена в приближенном виде. (Существуют и точное решение системы (9))
Предположим углы ϕ1 и ϕ2, а также их производные и разность (ϕ1-ϕ2) - малы по величине; тогда из (9) получим:

Или, с учетом влияния вибрации z=Amsinωt,

Активное демпфирование масс m1 и m2 приведет не только к уменьшению скоростей  и
и  но и угловых ускорений
но и угловых ускорений  и
и  а также самих углов ϕ1 и ϕ2, что позволяет более точно линеаризовать решение системы нелинейных уравнений (9).
а также самих углов ϕ1 и ϕ2, что позволяет более точно линеаризовать решение системы нелинейных уравнений (9).
Из (10) можно получить условие для выбора жесткости пружины:

Необходимым условием равенства углов ϕ1 и ϕ2 по амплитуде в динамике является их равенство в статике, т.е.

Для выполнения условия инвариантности к вертикальным колебаниям во всем диапазоне частот вибрации необходимо и достаточно, чтобы, помимо условия (13), выполнялось еще условие равенства периодов собственных колебаний маятников, которые приближенно можно представить как

Эти условия вполне физически выполнимы. Уверенность в технической реализуемости идеи подкрепляется еще и тем обстоятельством, что неточности расчета и изготовления могут быть уточнены за счет подрегулировки параметров системы (жесткости пружин с1 и с2, масс m1 и m2 и т.д.).
Запишем (11) в векторном виде

где: А - основная матрица коэффициентов системы;
ϕ(t) - матрица-столбец основных параметров;
Z(t) - одностолбцовая матрица возмущающего воздействия системы.

Если ввести в обращение еще вспомогательные определители В1 и В2, равные:

то амплитуды угловых колебаний наружной  и внутренней рамке
и внутренней рамке  можно представить в векторной форме, как
можно представить в векторной форме, как

где |А| и |В1, 2| - модули определителей вышеуказанных матриц.
Раскрыв определители (16), (17), получим:

Согласно (18), амплитуды угловых колебаний маятников будут:

Из выражения (20) можно сделать следующее заключение:
Условие равенства амплитуд  при разных частотах ω возмущающего воздействия, возможно выполнить только в случае, когда b1=d1 и b2=d2.
при разных частотах ω возмущающего воздействия, возможно выполнить только в случае, когда b1=d1 и b2=d2.
Рассмотрим, можно ли это осуществить.
При b1=d1 согласно (19) следует:

Из условия b2=d2 следует:

Заметим, что условие (22) составлено с учетом соотношения (21).
Если выбрать параметры маятников приближенно равными (для случая стабилизации опорного зеркала абсолютного гравиметра):
m1=100 г; m2=70 г, 

то соотношение 
Из (21) можно также получить требуемое соотношение между массами маятников:

Эти условия могут быть выполнены.
Рассмотрим структурную схему скомпенсированного амортизатора, где:
W1, 2(р) - передаточная функция идеальных маятников по каналам ϕ1 и ϕ2;
D(p) - компенсирующее взаимодействие маятников;
A(t) - возмущающее воздействие на маятники;
g1, 2(t) - управляющее воздействие для регулирования координат ϕ1, 2.
Рассматриваемой системе регулирования соответствует следующая система уравнений, записанная в операторном виде:

Введем обозначения:

Тогда система уравнений (24) примет вид

Рассмотрим матрицы:
 - основная матрица параметров системы
- основная матрица параметров системы
 - матрица возмущающих воздействий на систему
- матрица возмущающих воздействий на систему
 - матрица управляющего воздействия (если в системе предусмотрена адаптивная настройка)
- матрица управляющего воздействия (если в системе предусмотрена адаптивная настройка)
В нашем случае С(р)=0 (нулевая матрица) и векторы:

Тогда динамику амортизатора (25) можно записать в векторном виде

Уравнение (28) носит общий характер. В нашем случае отсутствует управляющее воздействие, т.е. С(р)=0. (Предусмотрена начальная настройка и выставка маятников относительно плоскости горизонта).
Уравнение вида (Т2р2+1) соответствует идеальной колебательной системе (без трения). Реальное колебательное звено будет описываться дифференциальным уравнением

Передаточная функция колебательного звена будет иметь вид

где κ - передаточный коэффициент, Т - постоянная времени, равная периоду собственных колебаний звена (14), ξ - относительный коэффициент затухания (0<ξ<1).
В результате расчета периода при выбранных параметрах маятников (23) получено
Т=23,2 с
Таким образом, учитывая полученную величину периода собственных колебаний предложенной колебательной маятниковой системы, можно полагать, что инерциальные свойства УСА позволяют эффективно гасить вибрационные возмущения, воздействующие на объект амортизации с частотой ƒэф≥0,1 Гц (при выбранных параметрах маятников).
Рассмотрим влияние температурных флюктуаций и других природных факторов на стабильность работы УСА.
Поскольку в УСА реализуется метод пассивной компенсации наклонов маятников за счет дифференциальной схемы их соединения, то основными параметрами маятников, на которые может влиять изменения окружающей температуры, будут:
 - приведенная длина маятника
- приведенная длина маятника
с - коэффициент упругости
Поэтому оценим степень влияния изменений  и с на величину рассогласования маятников
и с на величину рассогласования маятников  при угловых колебаниях.
при угловых колебаниях.
Примем:  - амплитудное значение рассогласования при возмущении
- амплитудное значение рассогласования при возмущении  где ƒ(t) - какая-то случайная функция колебательного воздействия вибрации основания,
где ƒ(t) - какая-то случайная функция колебательного воздействия вибрации основания,

Согласно выражению (20): 
Исходя из выводов по формуле (20), условием нарушения компенсации углов наклона маятника ϕ2 и, соответственно, погрешности в работе УСА будет служить нарушение в выполнении равенств: b1=d1 и b2=d2.
Рассмотрим, как изменение температуры ΔT будет влиять на степень компенсации, т.е. будут ли (b1-d1) и (b2-d2) стремиться к нулю при увеличении изменения температуры.
Основным аргументом в формуле (21), зависящим от температуры, является  а, точнее -
а, точнее -  Отсюда следует, что
Отсюда следует, что  где αt - коэффициент линейного теплового расширения материала маятников (Примечание - температурный коэффициент линейного расширения железа, к примеру, равен 1,2⋅10-5 К-1).
где αt - коэффициент линейного теплового расширения материала маятников (Примечание - температурный коэффициент линейного расширения железа, к примеру, равен 1,2⋅10-5 К-1).
Таким образом, приходим к заключению, что изменения температуры в реальных пределах практически не влияют на значения формул (21) и (22) и на погрешность стабилизации УСА. Возможно косвенное влияние температуры на погрешность, когда параметры электронных и механических схем устройства (при низком качестве исполнения используемых элементов схемы и недостаточной стабильности их параметров) будут случайным образом зависеть от температуры.
Для обеспечения стабильности работы предлагаемого устройства целесообразно выбирать материалы маятников, чтобы их жесткости с1, с2 имели линейную зависимость от нагрузки и температуры при минимальном трении в осях подвеса.
Источники информации
1. МПК: F16F 7/00 Ru 906762 (23.02.1982) Фрикционный амортизатор.
2. МПК: F16F 15/02 Ru 905539 (15.02.1982) Гаситель колебаний.
3. Патент США №4033541, кл. F16F 15/08, 1977.
4. Бублик Г.Ф. и др. Управляемый амортизатор в условиях поступательных и угло-вых колебаний основания. Вестник Киевского политехнического ин-та, Вып. 13, 1983 г. (прототип).
5. МПК: F16F 15/02 Ru 2229637 (27.05.2004) Динамический самонастраивающийся гаситель колебаний.
6. МПК: F16F 15/03 Ru 896279 (07.01.1982), БИ №1.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ динамического гашения колебаний объекта защиты и устройство для его осуществления | 2017 |
|
RU2654890C1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ ЛИДАРА В ПЛОСКОСТИ ГОРИЗОНТА | 2007 |
|
RU2335673C1 |
| Способ обеспечения автоматической балансировки статически неуравновешенного ротора | 2021 |
|
RU2766945C1 |
| СПОСОБ ДВУХКАСКАДНОЙ АМОРТИЗАЦИИ ОПОРНЫХ КОНСТРУКЦИЙ МАШИН | 2013 |
|
RU2547946C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОГО ГАШЕНИЯ КОЛЕБАНИЙ | 2015 |
|
RU2604250C2 |
| СИСТЕМА ВИБРОИЗОЛЯЦИИ ТЕЛЕЖКИ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2645474C1 |
| СПОСОБ УПРАВЛЕНИЯ И ИЗМЕНЕНИЯ ДИНАМИЧЕСКОГО СОСТОЯНИЯ ВИБРОЗАЩИТНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2696062C1 |
| Адаптивная система сейсмозащиты объектов | 2024 |
|
RU2840272C1 |
| АМОРТИЗИРУЮЩЕЕ УСТРОЙСТВО | 2009 |
|
RU2424457C2 |
| Способ и устройство одновременного динамического гашения колебаний объекта защиты по двум степенями свободы | 2017 |
|
RU2700942C1 |


Изобретение относится к области машиностроения. Маятники связывают по дифференциальной схеме и устанавливают соотношение между жесткостями упруго-демпфирующих элементов. Устройство содержит подвижные и неподвижные элементы. Упруго-демпфирующие связи образуют маятниковую систему с двумя степенями свободы. Маятники связаны по дифференциальной схеме и выполнены с возможностью совершать встречные колебания. Результирующие жесткости упруго-демпфирующих связей установлены по величине моментов пропорционально их маятниковости, при равенстве нулю их начальных статических наклонов к плоскости горизонта и равенстве нулю периодов собственных колебаний маятников. Достигается повышение эффективности подавления влияния вибрации основания в широком диапазоне частот (≥0,1 Гц), компенсация вертикальных ускорений вибрации основания защищаемого объекта и его отклонений от горизонта. 2 н. и 3 з.п. ф-лы, 3 ил.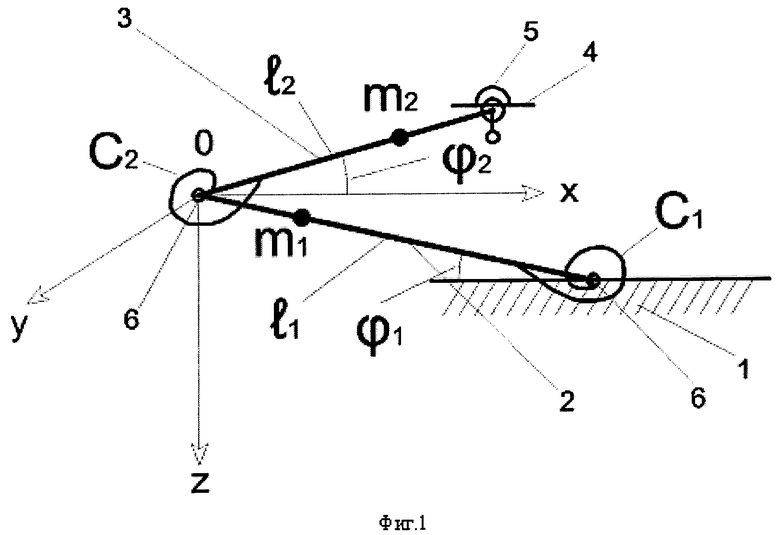
1. Способ амортизации, заключающийся в использовании колебательной системы с двумя степенями свободы, например горизонтальной маятниковой системы, в которой связывают маятники упруго-демпфирующими связями с возможностью начальной настройки и выставки параметров в статике, отличающийся тем, что маятники связывают по дифференциальной схеме и, с целью повышения эффективности защиты от вибраций в широком диапазоне частот, устанавливают соотношение между жесткостями упруго-демпфирующих элементов согласно условию:

где с1, 2 - результирующие жесткости упругих элементов маятников, а  и
и  - маятниковые моменты подвижных колебательных элементов.
- маятниковые моменты подвижных колебательных элементов.
2. Способ амортизации по п. 1, в котором начальные угловые отклонения маятников от плоскости горизонта выставляют равными по величине, т.е.
 .
.
3. Способ амортизации по п. 1, в котором, с целью защиты от влияний и горизонтальных линейных ускорений подвижного основания, начальные угловые статические отклонения маятников выставляют в плоскость горизонта, т.е.
 и
и  .
.
4. Способ амортизации по п. 1, в котором для обеспечения виброзащиты во всем диапазоне частот возмущающих ускорений вибрации основания практически от 0 до ∞ устанавливают равными также периоды собственных колебаний маятников, т.е.
Т1=Т2.
5. Устройство защиты от вибрации для реализации способа по п. 1, содержащее подвижные и неподвижные элементы, связанные упруго-демпфирующими связями, образующими маятниковую систему с двумя степенями свободы, выполненную с возможностью настройки и регулировки параметров, отличающееся тем, что маятники связаны по дифференциальной схеме, выполнены с возможностью совершать встречные колебания и, с целью повышения эффективности защиты от вибраций в более широком диапазоне частот, результирующие жесткости упруго-демпфирующих связей установлены по величине моментов пропорционально их маятниковости при равенстве нулю их начальных статических наклонов к плоскости горизонта и равенстве нулю периодов собственных колебаний маятников.
| Способ изготовления керамических форм и стержней | 1955 |
|
SU103383A1 |
| Способ повышения качества коровьего масла | 1948 |
|
SU82802A2 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |

