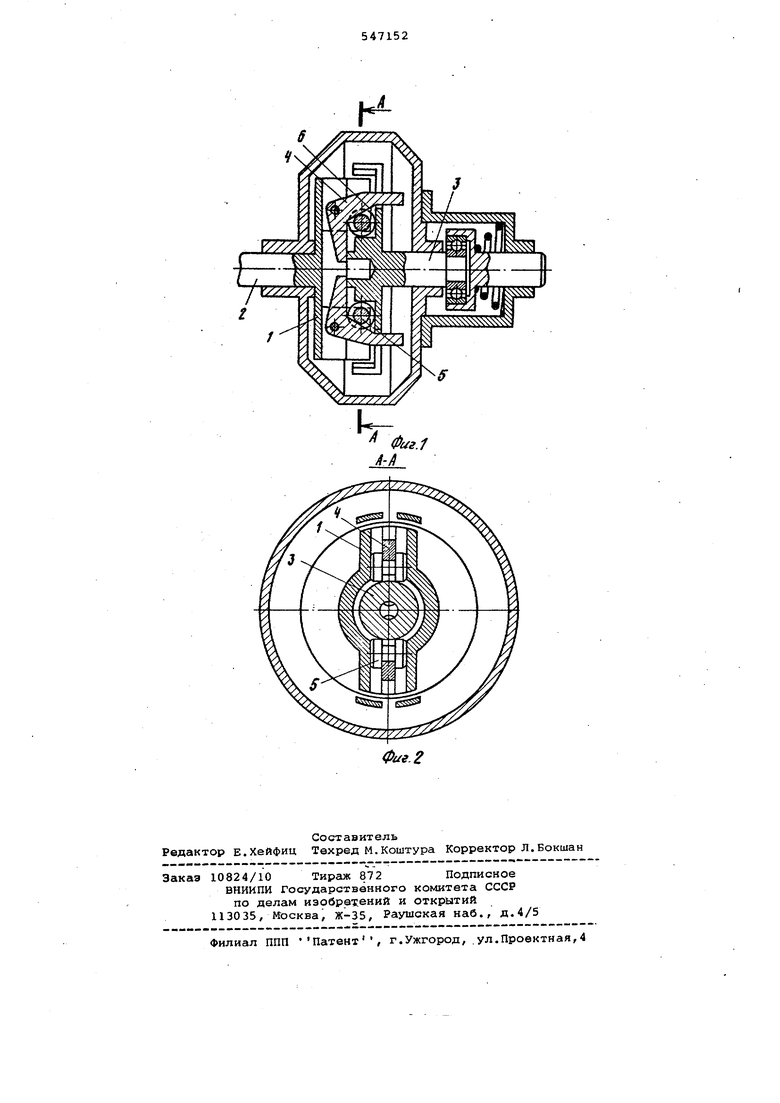
Изобретение отсносится к устройствам для регулирования угловой скорости, а именно к центробежным регуляторам. Известен центробежный датчик, с,одержащий входной элемент, связанный с ведущим валом, выходной элемент, установленный с возможностью осевого перемещения, и центробежный груз, pas размещенный между входными и выходными элементами tl3Однако он не позволяет повысить осевое усилие на входном элементе и увеличить астатизм и петлю гистерезиса в рабочей характеристике датчика. Известен центробежный датчик, содержащий входной элемент, связанный с ведущим валом, выходной элемент, установленный с возможностью осевого перемещения; и центробежный груз, размещенный между входным и выходным элементами С2. Недостатком данного центробежного датчика является невозможность повышения осевого усилия на выходном элементе и увеличения астатизма и петли гистерезиса -в рабочей характеристике датчика, определяемой отношением угловых скоростей входного элемента. при которых происходит срабатывание и опускание центробежного груза. С целью повышения осевого усилия на выходном элементе и увеличения астатиэма и петли гистеризиса в рабочей характеристике датчика, определяемой отношением угловых скоростей входного элемента, при которых, происходит срабатывание и опускание центробежного груза, в предлагаемом датчике на входном элементе шарнирно закреплен , по крайней мере, один двуплечий рычаг, упирающийся своими плечами соответственно в выходной элемент и центробежный груз. Плечи рычага расположены под углом 90-180°, а внутренная поверхность плеча рычага, упирающегося в центробежный груз, выполнена криволинейной. На фиг.1 показан предлагаемый центробежный датчик; на фиг.2 - поперечный разрез А-А на фиг.1. Центробежный датчик состоит из входного элемента 1, связанного с ведущим валом 2, выходного элемента 3, установленного с возможностью осевого перемещения. На входном элементе 1 установлен, по крайней мере, один двуплечий рычаг 4, упирающийся плечами соответственно в выходнойэлемент 3 и центробежный груэ 5, при этом плечи рычага могут быть расположены под углом 90-180° друг к другу, находящемся в диапазоне, а внутренняя поверхность б плеча рычага 4, упиракяцегося в центробежный груэ, выполнена прямолинейной. Датчик работает оледуницим образом При вращении входного элемента 1 вокруг оси центробежного датчика груз 5 под действием центробежной си ла упирается одновременно в рычаг 4. и выходной элемент 3, стремясь переместить его вправо. Конец рычага 4, упирающийся в эле мент 3, также стремится переместить его вправо. Таким образом, на выходном элементе происходит суммирование силы действия груза непосредственно на выходной элемент и реакции груза, действующей на рычаг 4. При увеличении углрвой скорости вращения элемента 1 до определенного значения суммарная сила на выходном элементе от реакции центро ежного груза и от рычага 4 преодолевает сопротивление нагрузки, например пружи ны, в результате чего выходной элемент перемещается вправо, а грузы 5 расходятся на большой радиус. При этом рычаг 4 поворачивается вокруг оси против часовой стрелки. что приводит к возрастанию силы действия со стороны груза на рычаг. Бла годаря перемещеник вправо выходного элемента 3 и повороту рычага 4 увели чивается расстояние от оси.рычага до точки упора о рычаг 4 груза 5. При уменьшении угловой скорости вращения входного элемента 1 до определенного минимального значения происходит сведение центробежных гру зов 5 на меньший радиус и перемещени выходного элемента 3 влево в исходное положение. В связи с тем, что при уменьшении угловой скорости груз 5 находится на увеличенном радиусе и упирается в по вернутый относительно начального положения рычаг 4 , угловая скорость вход ного элемента 1, при которой происходит возврат грузов в исходное состояние значительно меньше угловой скорости соответствующей моменту расхождения грузов на больший радиус. Благодаря тому, что поверхность рыча,га 4, взаимодействующая .с грузом 5, имеет криволиненую поверхность, например излом центробежный датчик позволяет получить при увеличении угловой скорости входного элемента два устойчивых состояния выходного элемента . Применение предлагаемого датчика позволяет более, чем в 2 раза увеличить полезное осевое усилие на выходном элементе и приблизительно а 1,5 раза увеличить ширину петли гистерезиса в рабочей характеристике. Формула изобретения 1.Центробежный датчик, содержащий входной элемент, связанный с ведущим валом, выходной элемент, установленный с возможностью осевого перемеще-г ния, и центробежный груз, раэмоцен- ный между входным и выходным элемен-. тами, отличающийся тем, что, с целью повьаления осевого усилия на выходном элеме нте и увеличения астатизма и петли гистерезиса в рабочей характеристике датчика, определяемой отношением угловых скоростей входного элемента, при которых происходит срабатывание и опускание , центробежного груза, на входном элементе шарнирно закреплен, по крайней мере, один двуплечий рычаг, упираю- . щийся своими плечами соответственно в выходной элемент и центробежный груз. 2.Датчик по П.1, о т л и ч а ющийся тем, что плечи рычага расположены под углом 90-180. 3.Датчик по.П.1, от л и ч аю щийся тем, что внутренняя поверхность плеча рычага, упирающегося в центробежный груз, выполнена криволинейной. Источники информащии, принятые во внимание при экспертизе 1. Гидромеханическая, передача автобуса. М.Н.Дзяд и др. М., Транспорт, 1968, с. 66, рис. 45. 2.Гидромеханические передачи автомобилей. В.И.Лапидуса и др. И., Машгиэ, 1961, с. 224, фиг.137 (прототип).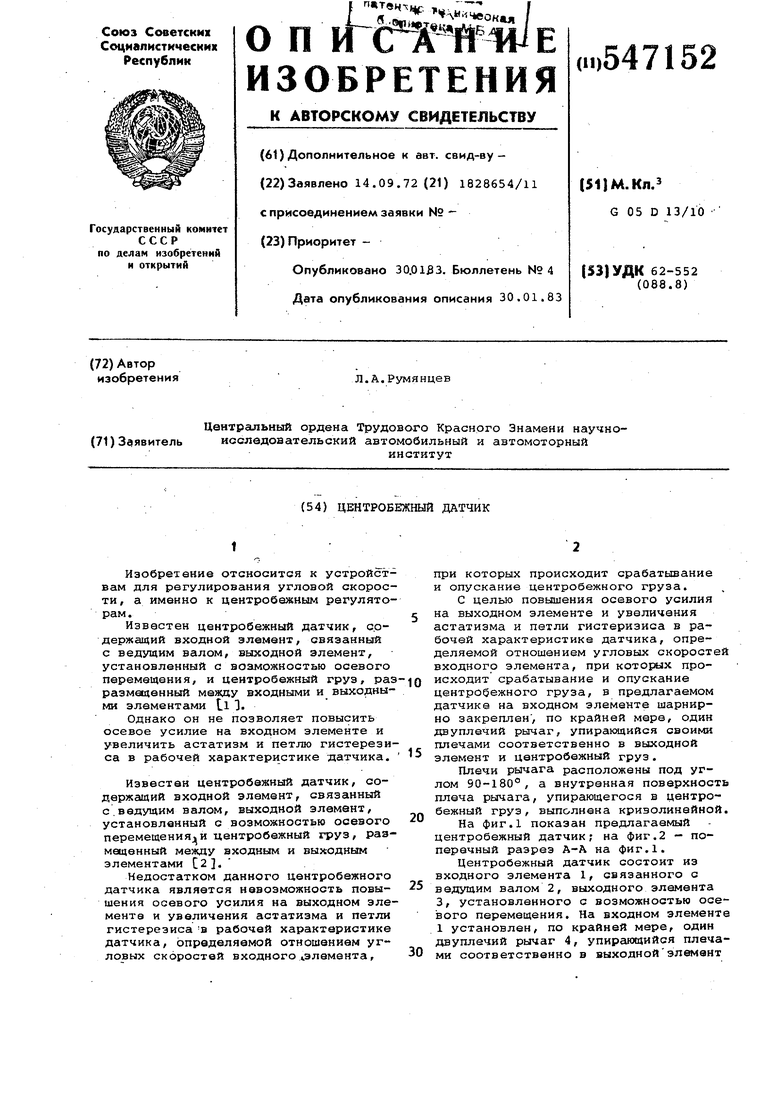
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухимпульсный регулятор угловой скорости | 1987 |
|
SU1451654A1 |
| Сервомеханизм для моторных повозок | 1945 |
|
SU69921A1 |
| Двухимпульсный регулятор угловой скорости | 1985 |
|
SU1335944A2 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МУФТОЙ СЦЕПЛЕНИЯ АВТОЛгОБИЛЯ | 1971 |
|
SU289696A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ УГЛОВОГО ВЗАИМОПОЛОЖЕНИЯ ВЕДУЩЕГО И ВЕДОМОГО ВАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2088777C1 |
| Стенд для динамических испытаний пневматической шины | 1990 |
|
SU1795336A1 |
| КОРОБКА ПЕРЕДАЧ К АВТОТРАНСПОРТНОМУ СРЕДСТВУ | 2012 |
|
RU2481511C1 |
| БЕЗИНЕРЦИОННЫЙ ТРАНСФОРМАТОР ВРАЩАЮЩЕГО МОМЕНТА ШАШКИНА | 1992 |
|
RU2073805C1 |
| АВТОМАТИЧЕСКАЯ КОРОБКА ПЕРЕДАЧ К ТРАНСПОРТНОМУ СРЕДСТВУ | 2016 |
|
RU2624137C1 |
| Дифференциал наземного транспортного средства | 1982 |
|
SU1119867A2 |