УСТРОЙСТВО для ЗАЩИТЫ от КОКСОВАНИЯ
(54) |РЕЛЬСОВОГО ЭКИПАЖА
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УВЕЛИЧЕНИЯ СЦЕПЛЕНИЯ КОЛЕСНОЙ ПАРЫ ТЕПЛОВОЗА С РЕЛЬСАМИ | 2007 |
|
RU2340491C1 |
| УСТРОЙСТВО ДЛЯ ПОВЫШЕНИЯ КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ ВЕДУЩИХ КОЛЕС ЛОКОМОТИВА С РЕЛЬСАМИ | 2005 |
|
RU2281216C1 |
| ЭЛЕКТРИЧЕСКАЯ ПЕРЕДАЧА ТЕПЛОВОЗА | 2006 |
|
RU2314948C1 |
| Электрическая передача тепловоза | 2020 |
|
RU2730723C1 |
| Устройство для увеличения сцепления ведущих колес локомотива с рельсами | 2019 |
|
RU2717413C1 |
| ЭЛЕКТРИЧЕСКАЯ ПЕРЕДАЧА ТЕПЛОВОЗА | 2011 |
|
RU2467899C1 |
| Способ обнаружения боксования и юза колес транспортного средства с электрической передачей | 2016 |
|
RU2657157C1 |
| Электрическая передача тепловоза | 2020 |
|
RU2735165C1 |
| Токоприемник для безрельсового электрического транспорта | 1937 |
|
SU55000A1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ПРЕДЕЛЬНЫХ ПО СЦЕПЛЕНИЮ РЕЖИМОВ РАБОТЫ ТЯГОВОГО ПРИВОДА РЕЛЬСОВОГО ТРАНСПОРТА | 2000 |
|
RU2175612C2 |
Изобретение относится к рельсовым транспортным средствам, содержащим ведущие колеса, приводимые во вращение тяговым даигателем.
Известно устройство для защиты от боксования рельсового экипажа, имеющего по крайней мере одну систему тягового привода с двигателем, связанным зубчатш передачей с ведущими колесамн, содержащее блок регулирования тягового усилия привода и размещенкьш в стстеме тягового привода датчик сигнала, соединенный через элемент сравнения с блоком регулирования тягового j ттая двигателя. В известном устройстве датчик измеряет, например, частоту вращения ведущих колес или их угловые ускорения.
Цель изобретения - такое усоверщенствование устройства, которое позволило бы реализовьтать максимальную силу тяги рельсового экипажа.
Эта цель достигается тем, что ко входу элемента сравнения подключен датчик механических колебаний элемента системы тягового привода. С целью повыщения надежности работы устройство может быть снабжено полосовым фильтром, способным работать на собственной частоте колеба1шй системы тягового привода и включенным между датчиком механических колебаний и элементом сравнения.
Датчик мекавических колебаний может быт уствновлен в cefpbre кожуха зубчатой переда в1.
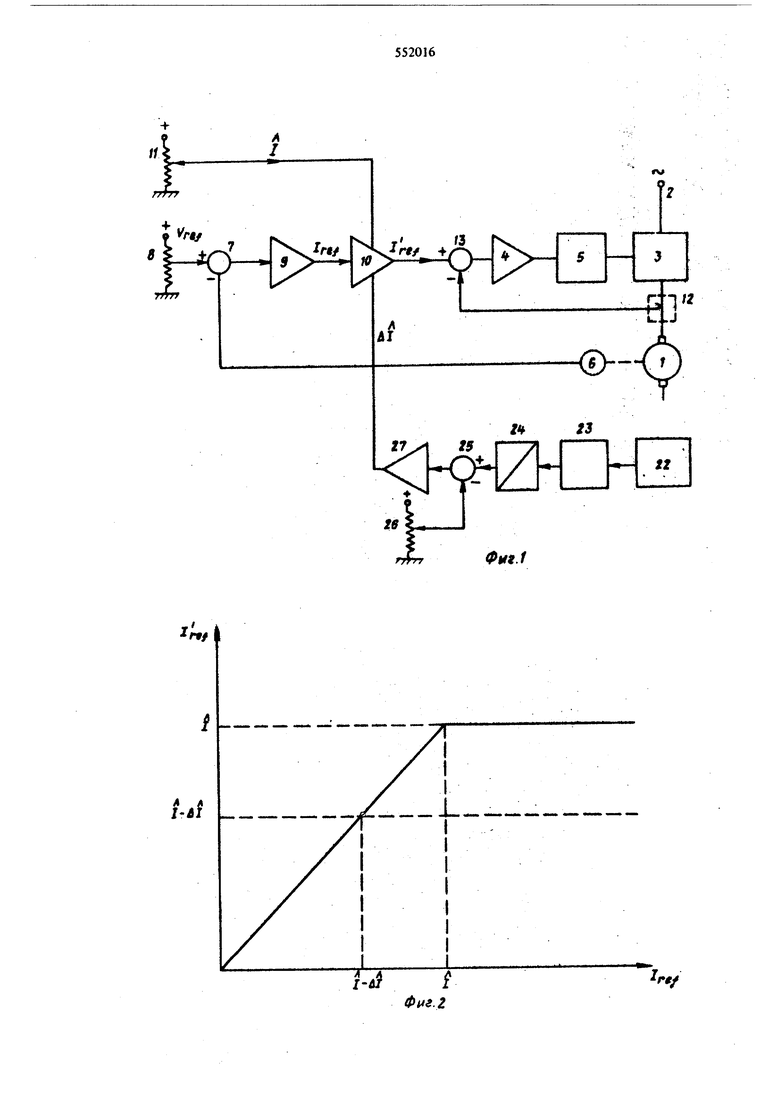
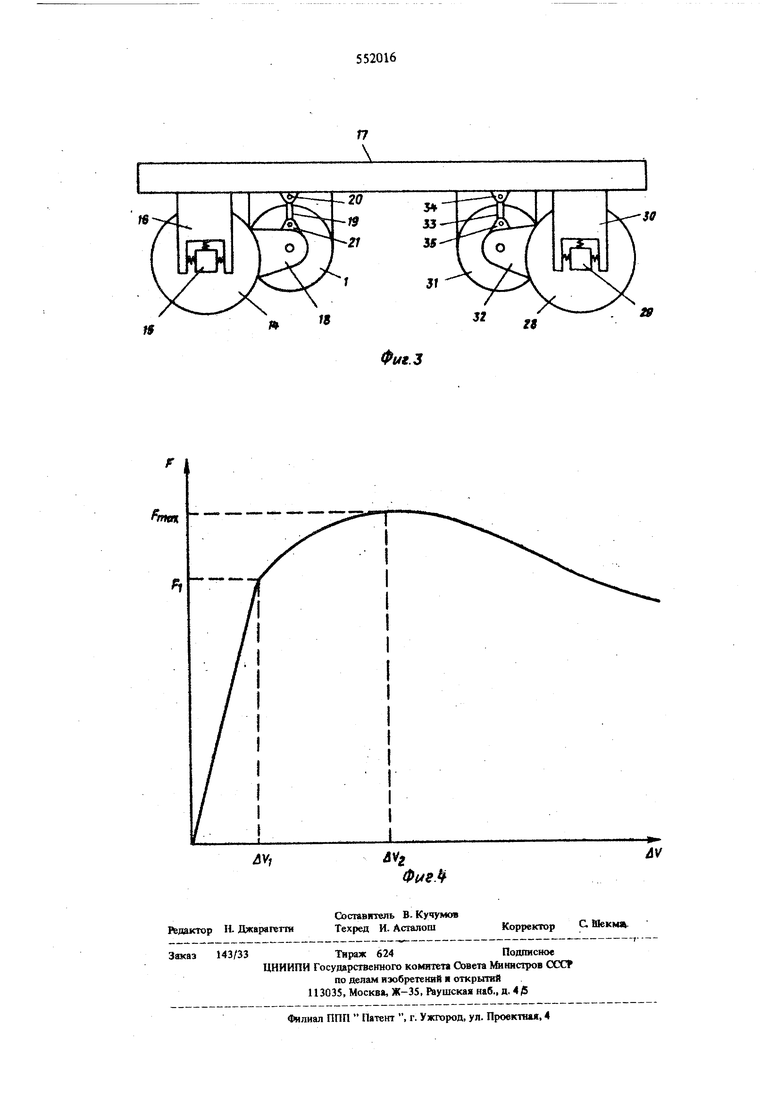
На фиг. 1 приведена принципиальнее блок-схема устройства; на фиг. 2 - характеристика вход-выход ограничивающего усилителя, вхо дяпкго в блок-схему на . ; на фиг, 3 размещение датчика (ханическях колебпний в тяговом приводе, варнакт; ш фщ. 4 - швисимость тягового усилия F от разницы ДУ между окружной скоростью ведущего колеса . и скоростью рельсового зютажа.
Ш фкт. 1 показало сипоаов и у равляпцм оборудование для тягового двитателя рельсоврга экипажа. Якорь двигателя 1 питается постояи}а 1М током, подаваемым известным способом от выводов 2 сети переменнаго тока через управляемый силовой вьшрямитель 3. Он вырабатывает постоянж)е напряжение, ве;га шна которого определяется сигналом, подаваемым с усилителя 4 на импульоный управляюищй блок 5. Двигатель 1 сгабжея тахогенератором 6, который вырабатьтает (31ГН8Л, пропорциоталъный частоте вращения двигателя 1. Она сравнивается в элементе 7 сравнения с эталонной скоростью Vvef задаваемой потенциометром 8. Полученное расхождение в скоростях подается ш ушлйтель 9, и геюа|ий 0оо18етс7:йугашук1 чрактеристнку, вьтодной еж-нал которого являoTf.jj тало5гаым значеш ем. юка дзигателяз подается fja огра ШЧ8вашадай усягштель 10. Он )C3fft5 крйстику, покйзааную на фш. 2. Вхоряому,сйгна; 1у ref ГЕропорщщналек выходкой sVefi. если . Л f ref Meiffiuse й.тз5 равен qjaKir-moR-iy зшч:екню I, 5 С1аковленноэд с яомощью нохеюдйометра II. ЕСЛИ |-К.. , iц - - iJInvsiM образом, с помощью нотегщйометра 11 пЖжет быть ytrraKOBJffiHC IVESKOH ал кое тяговое усилие и, следовательно, ускорение. Уст|х йство измервягш lOJGi 12 вырабатшаё сигнал, нропор1Гйс налы{,ш тсжу рйзнгатапя, и зкя шгиа-П в зтшменте 13 срй зненяя оравшгвается ., шгиалом tf-gf. Ражздуя iref н. 1 сосгавлж1 рйсхожденке sio току к подается через углавиель 4 к блоку 5 Б.шря1 1нтеля 3. 0ГГйса.ШЕ5я шсгегжз стремиться удер.- ШБать скорости постозшяой н равной значению y,.f;f . устзнсзлешюа потенгшометро.м 8, следя rspft этс-й, чгобь: не было превывгено мйкскрлпльное зкэчет-ше тока д зигатеяя (а следователь5 о, гакжй и тягавое усашке и ускорение), ус|аковлешюе с пойгощыо коте ашометра 11. Ни фкг, 3 кгюбргшена of br jiiSji тегеежка моTDpKOit) рельоэвого зюгпажа. Тегйяска имеет две оси, на ка.ждо-й кз которьт. уотановленьг зва ведЗ-тимх колеса, Ведугнее колесо 14 устаноБяеао ш ощгой нз осей и показана одга его бук;с:в 15, Букга 15 поцвещена нй пру-хкпъи в опорной стойке 16, котпрая .жестко сс::е,1лкнеш с рз-мой 17 тепежюн. Ось прнзодатсЕ в дйкжеггае .цзйгатекем 1, которьэд подвегиен к paMie Г/ тележкй поазедством зубчатой nepejjaif 18. Реактивная шла ш ко7кухе зубчаюй передачи, вь5рабатг шаемая нрн у.окорен;чн врвидаюишм моментом дангателя I, воспркнг мается серьгой 19, устйновленной й-кжду кронштейном 20 гамь 17 г-ележки к крокштейнон 2 la кожухе передачи 18. 22 ушлия (см:, блок-схему фйг. ) устанавливается такмм обрз., что 1Ш.шкргается воздействию усилия, действующего RS реакяшнуш тягу, т. е. нз «рыу 19. Лз,тч1{к 22 усилия можб бьггь устйновлея в окяе серьги 19 шш s одном йз KjwHunefiHOB 20 или 21. В друго.м вариаиге QH может бьтть усгановлен межг-у крошитейном 20 и рамой 17 гележки иш- между крснгшжйком 21 s кожухом передачи 18. Датчик 22 содержит известга е э,;5е.тенть, вырабатъшазощке шгнал постоянного тока, веляздги которого пропорциональна усилию, дейстьтездему на сжрьгу 19 И)ш ее KpoKiirrefsHbi. Этот сигнал подается иа полосовой фильтр 23, KOTOpbriHiporiyCKaeT а1гна,Тьг с частотой, )-цей в случае мехаю1ческих колебагшй тюмякуто о Типа. В типичнорл случае эта частота составляет несколько лрсятков герц. Выходной сигма; с фильтра 23 преобразуется а вьшрямителе 24 в шгнал псСтоянного напряже} ия, пропор1 иональнью амплитуд-; колебаний, причем этот . подается далее ка элеггкш 25 сравнения. С iioTe-iUiKOivfeTpa 26 получается пороговый сигнал Ампгагтуда колебаний фавнивается с этим пороговым етгналом в элементе 25 срувненкя. Если амплитуда колебаний превышает значение, соответствующее пороговому сигналу, элемент 25 вырабатывает сигнал А1 (см. фиг. 2), который через усшжтель 27 подается на усжьтитель 10 (см. фиг. ) дгш уменьшения ншряжещш выпрямителя 3. Сиг-нал AT уменьшает граничное значение, уст новленное потенциометром 11 до значения I - А амплитуда колебаний превышает пороговое значе1ше, то величина лока сигнала буде ограншюнз до значения I-AI. Таким образом, ток даигателя 1 с уменьшением тягового усияи шохветственно уменьшается, вызывая уменьшение йм1 литуды колебаний. Таким образом получается замкнутая схема управления, которая при необхощмостн ускорения автоматически обеспечивает режим работы тяговой системы в виде F Friiax; , показанной на фиг. 4. Таким образом при всех условиях будет обешечиваться р.®иссимально8 сцелление. Пороговое значение, с которым сравнивается ашшитуда колебаний в элементе 25 сравнения на фиг. 1, может .быть |жвно нулю, и в этом шгучае потенциометр 26 и элемент 25 сравве1В1я могут не применяться. Однако целесообразно с помощь:э потешдиометра 26 выбирать также пороговые значения, чтобы избежать негарантированного снижегшя тягового усилия, вызванного незначительными ко.пебаниями. Аналогич1П)ГМ образом в шкоторых случаях может быть целесообразным введение в сигнальный тракт 24-25-27-10;Сглаживающих устройств и линий задержки для того, чтобы кратковременные колебания не уменьшали тяггового ус1шия двигателя J. ДД1-ЧИК 22 усилия, использованный в данном примере, может быть расположен в любом месте шстемь тягового привода или в раме 17 тележки Наиболее подходящее раотоложение в каждом конкретном случа-е зависит от конструкции системы дветатель - силовая передача-подвеска ведущего ко.чеса, которая может меняться в широких пределах. Важно, чтобы датчик был рашоложен в таком месте, где бы он подвергался воздействию сил, возникающих при названных механическ} х колебаниях. На фиг. 3 тележка снабжена еще одной парой ведущих колес 28, буксы 29 которых подвешены в опорной стойке 30. Ось приводится в движение пофедством двигателя 31 через зубчатую передачу 32, кожух которой снабжен серьгой 33, имеюшей кронштейны 34 и 35. Двигатель 31 может быть снабжен собственной управляющей и питающей системой, идентичной описанной системе двигателя I, показанной на фиг. 1, и в этом случае ддтчик устанавливается таким же образом в серьге 33 или в ее кронштейнах 34 и 35. На фиг. 4 показано, как в рельсовом экипаже. изменяется тяговое уси;ше F в зависимости от разницы AV г.®жду окружной скоростью ведущего
колеса и скоростью экипажа. В относительно большой степени вид кривой зависит от поверхности рельсов и ведущих колес, наличия загрязнений, ржавчмны и т, д. и от скорости движения. Однако, когда тяговое усилие увеличивается от нуля до определённой величины F,, ДУ из-за упругих деформаций срввннтельно медле но увеличивается до определенного значения Д V,. В типичном случае Fj составляет около 75% от Fmax, Если тяговое усилие будет увеличиваться ещб больше, между колесами и рельсом возникает явно выраженное проскальзывание, Макоямальное дговое. усилие Fmax дрстигается, когда ДУ ДУ, (Ду, обычно составляет од;ш шш несколько км/час). Если AV увеличивается еще больше, тяговое усилие уменьшается.
Весьма желательно иметь возможность работать при максимально возможном тяговом уси;ши, т. е. устойчиво работать при , когда F fra.axПоскольку вид кривой и, следовательно, AV, и Fmax относительно сильно меняются в зависимости от неуправляемых внеиших условий, до сих пор это желание было невьшолнимым. В предлагаемом устройстве работа в диапазоне является в принципе неустойчивой, так как производ 1ая F по ДУ равна нулю или является отрицательной вел 1едной. По этой причине в указанном диапазоне в Системе ведущее колесо - силовая передача - тяговый двигатель - тележка возникают механические колебания. Эти колебания имеют собственную частоту (возможно несколько), определяемую механической конструк1щей системы. Наличие механических колебаний такой собственной частоты является, следовательно, поКазателе1у1 того, что отстема работает в диапазоне ,
В некоторых случаях двигатели одной тележки (1Ш все двигатели зкипажа питаются от общего вьтрямителя 3 (см. фиг. 1). В этом случае каждая система двигатель - ведущая ось соответствующим образом снабжаются своим датчиком 22 усилия, фильтром 23 и выпрямителем 24. Для передачи самого больщого из сигналов, получештых с вьшрямителей, к элементу 25 сравнения ..jнавяивается селективный контур. При этом обмотки якорей каждого двигателя питаются от общего вьшрямителя, в то время как токи возбуждения каждого двигателя могут регулироваться отдельно, например установкой для каждого двигателя отдельного управляемого преобразователя для литания обмотки возбуждения и системы управления дан регулирования трка возбуждения мотора.
Таким образом, каждая система управления поДцерживает ток возбуждения двигателя равным эталонному значению, подаваемом} на систему управления. Нормально на системы управления подаются опорные значения одинаковой веяишны, соответстаующей полному потоку двигателя при скоростях двигателя от нуля до определетюй вели9 ны, так назьшаемой основной скорости, которая,
например, может бьгть равна половине полной асорости двигателя к при увеличении скорости двигателя выше названной велиины - CIШжe ffle потока.
Когда двнгатели передают крутящий момент на ведущие колеса, распределение ;щаления между ОСЯМ экипажа изменяется таким образом, что у жкоторых осей ддвление колес возрастает, а у цругнк - уменьцшется. Некоторые оси поэтому будут проскальзывать, не будет достигнута достаточная сила у других осей. Если сигнал проскальзьшания с датчика меха}шческих колебаний вращающейся оси вызовет уменьшение тока обмоток якоря всех .двигателей посредством селективного Korrrjpa и общего силового вьтрямителя, то 1Э жущий крутящий момент на осях, которые а ITO время не вращаются, также будет уменьшаться, я максимальный движуишй крутящий не будет достигнут.
В опйса1шой GHciCMe с общей {кгулировкой юка якоря } икдявидз апьным управлением током возбуждения можно, однако, избежать этого недостатка с.7гедую цим образам.
Сигнал с каждой системы двигатель - ведзтцая ось, который зависят от амшмтуды колебаний, фавшгаается с первым пороговым значением. Если шп-гал с двигателя превыгшет это значегдае, он подается га управггения тока возбуждения двигателей след ющнм образом: при скоростях ни:же ОС.ЧОВНОЙ скорости сигаал подается к системам з равлегшя тхжа возбу7.кдения других двигателей (по не Г1роскальзьшаюгш х двигателей) таким образом-, fSTO токи возбуждения зткх двигателей уметашаются на величину, соответствующую сихийлу. Позтот поток в этих двигателях .умекь-, цается, и токи в их обйогках якоря стремятся возрасти. Обишй регуштор тока якоря противодействует этому снижением напряже шя ш якорях. Это, в свою очередь, влияет ш ттж обмотки якоря, и таким образом врашаюииж момент .вращающегося двигателя снижается, причем вращающие моменты других дв гателей остаются нензл иffijJM}. При скоростях, превышающих основ гую осорость, сигнзл, ззвисявдш от аг тйлитуяга коле6аш-1Й, подается только к шстеме управление тока возбуждения своего двигателя таким стразом, что ток возбуждения возрастае-т ш величину, соотBcicTByicsnyio шгнялу. Тогда поток возбуждения двигателя увеличивается, а ток обмотки якоря и, следовательно, врзищюодий момент уменьшаются.
В результате всегда н прн всех скоростях движуш.ая сила каждого шигателя будет максншльгш возможной по отношению к осевому давлению той ведущей OGI, которая ооедгшека с данным даигвтелем.
Описанная система соответствующим образом расширяется подачей всех сигналов проскальзывания на селективный контур, который передает наибольший из 1шх на схему, где СИПТЕЛ сравнивается со вторым порогоаым значением, которое
больше, например, в два раза, первого порогового значения. Если сигнал превышает это второе пороговое значение, то это является показателем того, что устансшился слишком большой ток якоря jio отношению к преобладающему одеплению, и сигнал так вйздействует на общую систему управления тока якоря, Ч1О ток якоря и, следовательно, тяговое усилие всего экипажа уменьшаются до величины, соответствушцей преобладаиицему cniemiemno.
Магштоупругае преобразователи силы, списанвьв в приведешюм , могут быть заменены на автчшси уашая любого другого типа, например на тензометрические датчики. ВАЮСТО датчиков усилеши могут быть использованы щ}угие дагики мехаш1че(ясих кояебашга, например акселерометры. В тележке, показанной на фиг. 3, акселерометр может быть установлен на каждом конце тележки. В варианте могут быть ишользоваяы преобразователи вращакнцего момента (напртмер, магнитоупругого типа), и они устанавливаются здким образом, чтобы воспринимать вращавхфй момент в юй части, кот()ая подвержена копебаншш (например, ось колесной пары).
Умеш шение тягового усилия в :%висимос1я от амплитуды колебаш может, конечно, быть получено МИОПи«1 СЯОСОбаМИ, отличными от ОПИд
санного в свяш с фиг. 1. Например, сигнал ДТ может быть подай на элемент 13 сравнения и здесь вычтен из эталонного значения тока Iref
В простейшем случ&е выходной сигнал с датчика механических колебаний подается на индикатор в кабине {машиниста. Поэтому при возникновении колебаний водитель может вручную регулировать тяговое усилие. Даже в этом простейшем случае может быть достигнуто зиачительное улучшение тягового усилия.
Другим достоинством описанного устройства является то, что оно в значителыюй степеии уменьшает механические напряжения в ведущих осях с колесами и элементами подаески, в раме тележки, двигателях и устройствах силовой передачи, возниканнцие из-за неуправляемых колебанш.
Формула изобретения
одну (жстему тягового привода с двигателем, связаш1ьп«4 зубчатой передачей с ведущими колесами, содержащее блснс регулирсжания тягового усилия i щжвода и размещенный в системе тягового привода датчик сигнала, соединенный через элемент фавнения с блоком регулироваиия тягового усилия двигателя, отличающееся тем, что, с пэлью реализации максимальной силы тяги рельсового жипажа, ко входу элемента сравнения
подключен датчик механических колебаний элемента системы тягового привода.
серьге кожуха зубчатой передачи.
0lllt.1
Д A
IAt
ff
Физ.2
Г7
31
