Изобретение относится к области железнодорожного транспорта и предназначено для повышения тяговых качеств локомотивов с тяговыми электродвигателями постоянного тока.
Известен способ обнаружения боксования и юза колесных пар локомотивов с электрической передачей, основанный на сравнении токов, протекающих по цепям параллельно соединенных тяговых электродвигателей (ТЭД), при этом токи измеряются косвенным способом посредством контроля и сравнения потенциалов равнопотенциальных точек цепей ТЭД (Схемы электрических цепей тепловозов ТЭП70, 2ТЭ116: Учебное иллюстрированное пособие / В.В. Грачев, Б.Н. Морошкин, С.В. Сергеев, Д.Н. Курилкин, А.А. Надежин. - М.: Маршрут, 2006. - стр. 81). Устройство, реализующее этот способ, включает шестифазный полупроводниковый мост, средние точки которого подключены к равнопотенциальным точкам цепей ТЭД, а катодные и анодные выводы моста - к исполнительным реле боксования и юза.
Недостатком способа является низкая чувствительность, обусловленная, во-первых, неизбежно высоким порогом срабатывания исполнительных реле, связанным с различием электромеханических характеристик ТЭД, а, во-вторых, демпфирующим действием индуктивностей обмоток возбуждения, исключающим формирование устойчивой разности потенциалов точек подключения шестифазного полупроводникового моста, необходимой для срабатывания исполнительных реле, при небольших, до 1-1,5%, проскальзываниях колесных пар, имеющих место при работе последних на пределе сцепления.
Известен способ обнаружения боксования и юза колесных пар, основанный на анализе спектральных характеристик сигнала измеренной угловой скорости вращения колеса (J.H. Yu. Re-Adhesion control based on wheelset dynamics in railway traction system / T.X. Mei, D.A Wilson // United Kingdom Automatic Control Council papers. Available at: http:/ukacc.group.shef.ac.uk/proceedings/control2006/papers/f97.pdf), согласно которому измеряют угловою скорость вращения каждого из колес колесной пары, вычисляют их разность, выполняют спектральный анализ сигнала разности угловых скоростей вращения колес и контролируют амплитуду гармонической составляющей спектра, соответствующей собственной частоте крутильных колебаний двухмассовой системы "колесо-ось-колесо".
Недостатком способа является сложность реализации, обусловленная, во-первых, потребностью в большом количестве датчиков угловой скорости колес, причем монтироваться они должны на буксе каждого из колес, увеличивая таким образом величину неподрессоренной массы экипажа, что отрицательно сказывается на его динамических характеристиках, а, во-вторых, чрезвычайно высокой потребной точностью измерения угловой скорости вращения колес. Амплитуда сигнала разности угловых скоростей колес на начальной стадии развития боксования не превышает 0.05 рад/с. Для измерения такой разности при скорости 30 км/ч погрешность измерения угловой скорости каждой из колесных пар не должна превосходить 0,00048%.
Известен способ обнаружения боксования и юза колес транспортного средства с электрической передачей (Клепиков В.Б., А.В. Тимощенко. Комбинированное определение буксования и юза колес рудничного электровоза с использованием программируемой логической интегральной схемы. - Вестник Национального технического университета "ХПИ": сб. науч. тр. - Харьков, 2015. - Вып. 12, стр. 64-67), принятый за прототип, основанный на анализе спектральных характеристик тока, протекающего в цепи ТЭД. В соответствии с этим способом величину тока якорной цепи ТЭД измеряют датчиком, включенным в эту цепь. Выходной сигнал датчика тока подвергают спектральному анализу, в результате которого определяют амплитуды гармонических составляющих, частота которых соответствует частоте автоколебаний колесных пар при боксовании. Признаком начала боксования является увеличение амплитуд указанных гармонических составляющих выше предварительно заданного порогового значения.
Недостатком способа является недостаточно высокая чувствительность для выявления боксования на ранних стадиях его развития. При движении колесной пары на пределе сцепления имеют место пульсации ее угловой скорости вследствие проскальзывания с амплитудой не более 2% и частотой до 20 Гц. Однако эти пульсации угловой скорости колесной пары практически не отражаются на величине тока якоря тягового электродвигателя вследствие значительной индуктивности обмоток его главных и дополнительных полюсов, величина которой может достигать 20 мГн. По этой причине данный способ, как и другие, основанные на контроле токов ТЭД, не способны обнаружить боксование на его начальной стадии. Между тем, именно на начальной стадии процесса развития боксования или юза кратковременное снижение вращающего или тормозного момента на оси колесной пары, или, напротив, увеличение силы сцепления подачей в зону контакта небольшого количества песка, способно предотвратить возможное дальнейшее развитие боксования или юза и потерю устойчивости движения колесной пары, после которого ликвидация боксования или юза уже невозможна без существенного снижения силы тяги или тормозного усилия.
Изобретением решается задача повышения чувствительности системы обнаружения боксования и юза транспортного средства с тяговыми электродвигателями постоянного тока.
Техническим результатом реализации предлагаемого способа является повышение чувствительности системы обнаружения боксования и юза колес танспортного средства с электрической передачей за счет использования в качестве параметра, контролируемого датчиком, падения напряжения на обмотках полюсов ТЭД, при этом боксование и юз определяют по увеличению относительной мощности гармонических составляющих амплитудно-частотного спектра выходного сигнала датчика в ограниченной полосе частот, определяемой инерционными характеристиками тягового привода транспортного средства.
Технический результат достигается тем, что в способе обнаружения боксования и юза колес транспортного средства с электрической передачей, состоящем в том, что выходной сигнал датчика одного из параметров цепи тягового электродвигателя подвергают спектральному анализу, в результате которого определяют амплитудно-частотную характеристику сигнала и контролируют уровень амплитуд гармонических составляющих сигнала, в качестве параметра цепи тягового электродвигателя используют падение напряжения на обмотках полюсов тягового электродвигателя, а боксование и юз определяют по увеличению относительной мощности гармонических составляющих амплитудно-частотного спектра выходного сигнала датчика в ограниченной полосе частот, определяемой инерционными характеристиками тягового привода транспортного средства.
Заявленный способ поясняется чертежами.
Фиг. 1. Функциональная схема устройства для реализации способа.
Фиг. 2. Кривая зависимости силы сцепления колесной пары с рельсами от величины избыточного проскальзывания колесной пары.
Фиг. 3. График изменения параметров тягового привода тепловоза при работе на пределе сцепления колесной пары с рельсами.
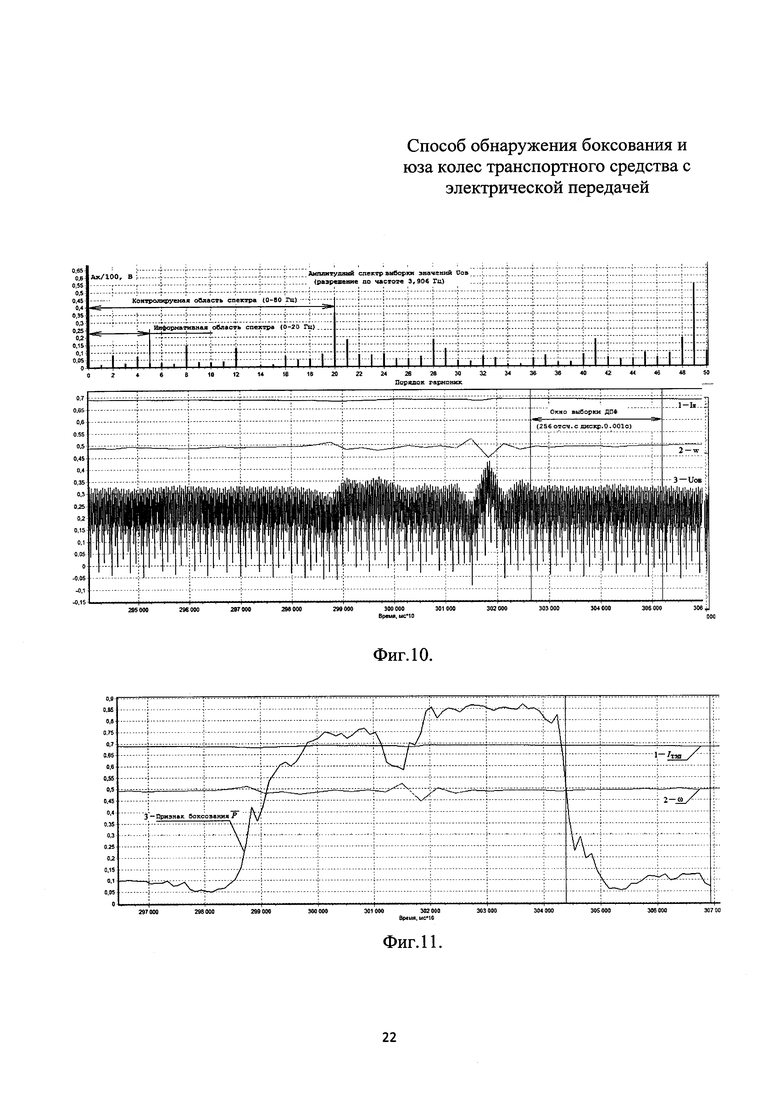
Фиг. 4. Амплитудный спектр выборки значений Uов при отсутствии боксования (фрагмент 1).
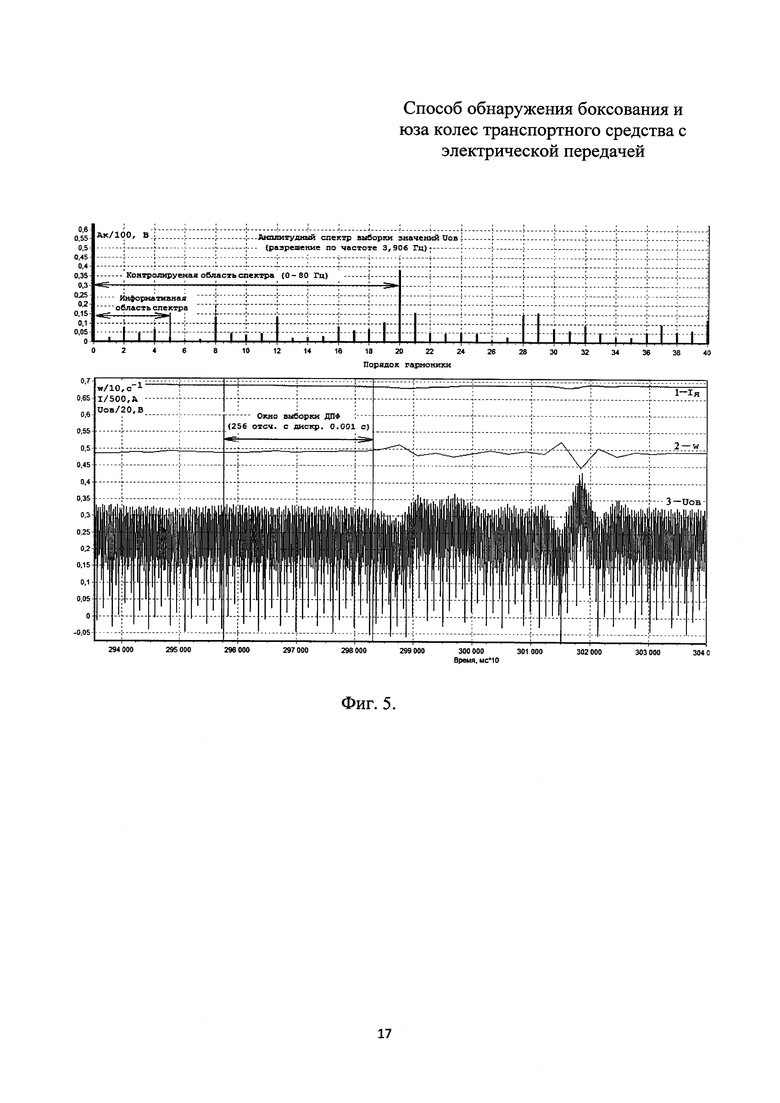
Фиг. 5. Амплитудный спектр выборки значений Uов при отсутствии боксования (фрагмент 2).
Фиг. 6. Амплитудный спектр выборки значений Uов через 0,03 с после начала ускорения колесной пары вследствие частичной потери сцепления.
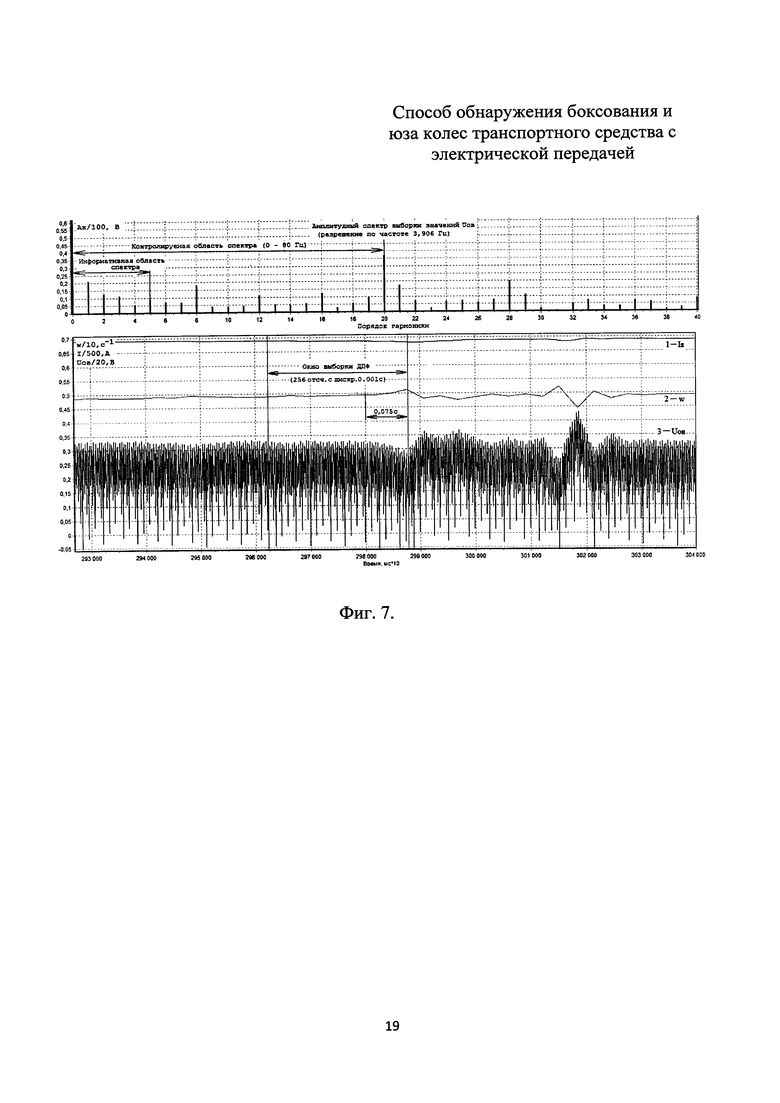
Фиг. 7. Амплитудный спектр выборки значений Uов через 0,075 с после начала ускорения колесной пары вследствие частичной потери сцепления.
Фиг. 8. Амплитудный спектр выборки значений Uов через 0,105 с после начала ускорения колесной пары вследствие частичной потери сцепления.
Фиг.9. Амплитудный спектр выборки значений Uов при развитии боксования.
Фиг. 10. Амплитудный спектр выборки значений Uов после восстановления сцепления.
Фиг. 11. Изменение признака боксования в течение 1 сек при движении на пределе сцепления.
Предлагаемый способ может быть реализован с использованием устройства, функциональная схема которого приведена на фиг. 1.
Оно включает датчик напряжения 1, подключенный к обмоткам полюсов тягового электродвигателя 2. Выход датчика напряжения 1 соединен с входом аналого-цифрового преобразователя 3, выход которого подключен к шине данных вычислительного модуля 4, выход которого, в свою очередь, связан с одним из входов системы управления локомотивом 5.
Функционирует устройство следующим образом. Датчик напряжения 1 постоянно измеряет величину падения напряжения на обмотках полюсов тягового электродвигателя 2. Выходной сигнал датчика напряжения 1 преобразуется в цифровую форму посредством аналого-цифрового преобразователя 3 и считывается вычислительным модулем 4. После накопления выборки в вычислительном модуле 4 для этой выборки выполняется дискретное преобразование Фурье (А.Б.Сергиенко. Цифровая обработка сигналов. - СПб.: Питер, 2002 - стр. 250), в результате которого определяются значения амплитуд гармонических составляющих спектра и вычисляется значение относительной мощности гармонических составляющих в ограниченной полосе частот, определяемой величиной моментов инерции колесной пары и якоря тягового электродвигателя 2, а также индуктивностью обмоток полюсов тягового электродвигателя 2.
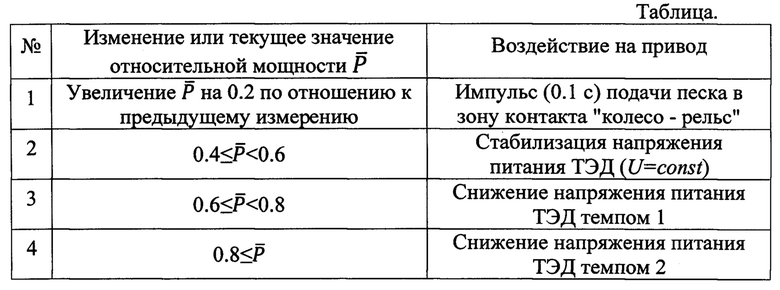
Это значение по каналу обмена данными передается в систему управления локомотивом 5, которая, в зависимости от полученного значения, осуществляет воздействие на привод в соответствии с таблицей.
В качестве датчика напряжения 1 может использоваться датчик LA 25-NP/SP11 (ООО "ЛЕМ Россия"). Аналого-цифровой преобразователь 3 и вычислительный модуль 4 могут быть реализованы с помощью одноплатного многофункционального модуля РСМ-3718Н формата PC/104 (Advantech Co., Ltd.). Поддерживаемые этим модулем интерфейсы Ethernet и RS232/RS485 позволяют обеспечить его взаимодействие практически с любой бортовой микропроцессорной системой управления современного локомотива, в том числе с системой МСУ-ТП тепловоза 2ТЭ116У ("Система МСУ-ТП на тепловозе 2ТЭ116У" / С.И. Ким, С.В. Сергеев, В.И. Харитонов и др. - Журнал "Локомотив", 2009 г., №8 - стр. 15).
При движении колесной пары на пределе сцепления в зоне АБ кривой сцепления (фиг. 2) имеют место пульсации ее угловой скорости вследствие проскальзывания с амплитудой не более 2% и частотой до 20 Гц. Однако эти пульсации угловой скорости колесной пары практически не отражаются на величине тока якоря тягового электродвигателя вследствие значительной индуктивности обмоток его главных и дополнительных полюсов, достигающей 20 мГн. Это заключение подтверждается графиком изменения значений параметров цепи тягового электродвигателя при движении его колесной пары на пределе сцепления (фиг. 3), полученным осциллографированием соответствующих сигналов в силовой цепи тепловоза 2ТЭ116У при движении его на одном тяговом двигателе в условиях искусственно ухудшенного сцепления. Из фиг. 3 следует, что, как пульсации выпрямленного напряжения тягового трехфазного выпрямителя, питающего ТЭД, так и пульсации электродвижущей силы (ЭДС) ТЭД, вызванные изменением угловой скорости (кривая 2 фиг. 3) вращения колесной пары вследствие частичной потери сцепления в период между 29,8 с и 30,1 с, компенсируются изменением напряжения на обмотках полюсов ТЭД (кривая 3 фиг. 3) и не приводят к заметному изменению тока якорной цепи (кривая 1 фиг. 3) в этот период. В данном случае изменение тока не превышает 1,16%, причем характер изменения тока в этих пределах совершенно не соответствует изменению угловой скорости колесной пары.
Отсутствие реакции тока якоря на пульсации угловой скорости колесной пары при работе ее на пределе сцепления легко объяснимо.
Величина тока iЯ в цепи якоря ТЭД последовательного возбуждения определяется напряжением U источника питающего напряжения, величиной Е электродвижущей силы (ЭДС) якоря, которая определяется, главным образом, величинами угловой скорости ω вращения якоря и тока обмотки возбуждения ТЭД, а также величиной ЭДС самоиндукции обмоток дополнительных полюсов и возбуждения:

где rЯ, rОВ - активное сопротивление, соответственно, обмотки якоря и возбуждения, Ом;
LОБМ - индуктивность обмоток дополнительных полюсов и возбуждения ТЭД, Гн.
Влиянием на величину ЭДС магнитного поля якоря в данном случае можно пренебречь, поскольку речь идет о небольших изменениях тока в начальный период развития боксования.
Непосредственным следствием изменения условий сцепления колеса с рельсом является изменение day угловой скорости вращения колесной пары:

где  - угловая скорость вращения колесной пары D (м), соответствующая скорости V движения локомотива, рад/с;
- угловая скорость вращения колесной пары D (м), соответствующая скорости V движения локомотива, рад/с;
MТЭД - момент на валу ТЭД, при отсутствии ослабления возбуждения определяющийся квадратом тока якоря, н⋅м;
МСЦ - момент сцепления колеса с рельсом, приведенный к валу ТЭД, н⋅м.
Увеличение угловой скорости колесной пары при потере сцепления приведет к соответствующему увеличению ЭДС якоря ТЭД, что, в свою очередь, как следует из уравнения (1), должно привести к уменьшению тока якоря. Однако уменьшение тока якоря приводит к снижению ЭДС ТЭД, а также к увеличению ЭДС самоиндукции обмоток ТЭД в направлении тока обмоток и уменьшению падения напряжения на активных сопротивлениях обмоток, что будет препятствовать уменьшению тока.
Таким образом, обмотки полюсов ТЭД выполняют функцию демпфера, противодействуя изменению тока в цепи ТЭД вне зависимости от причин, вызвавших это изменение. Следствием такого противодействия является уменьшение интенсивности или даже полное отсутствие изменения тока в цепи якоря ТЭД при резких изменениях или колебаниях угловой скорости вращения колесной пары, характерных для начальной стадии боксования или юза. Это практически исключает возможность своевременного, т.е. на начальной стадии, обнаружения боксования или юза колесной пары системами, в основу работы которых положен контроль токов цепей ТЭД. Между тем, именно на этой, начальной стадии процесса боксования, кратковременное снижение вращающего или тормозного момента на оси колесной пары, или, напротив, увеличение силы сцепления подачей в зону контакта небольшого количества песка с очень большой вероятностью предотвратит возможное дальнейшее развитие боксования со смещением рабочей точки пятна контакта на участок БГ (фиг. 2) и потерей устойчивости движения колесной пары, где ликвидация боксования уже невозможна без существенного снижения силы тяги или, в случае, если имеет место юз тормозного усилия.
Как следует из графика изменения параметров тягового привода (фиг. 3), в отличие от величины тока ТЭД, изменение огибающей напряжения на обмотках полюсов ТЭД соответствует изменению угловой скорости ТЭД, а величина относительного изменения огибающей напряжения на обмотках полюсов существенно, больше чем в 8 раз, превосходит относительное изменение угловой скорости. При этом основная частота изменения напряжения на обмотках полюсов определяется пульсациями выпрямленного напряжения трехфазного источника питания ТЭД и равна 6-и кратной частоте фазного напряжения генератора.
Такая чувствительность напряжения на обмотках полюсов ТЭД к изменениям угловой скорости колесной пары также легко объяснима.
Из формулы (1) напряжение  на обмотках полюсов ТЭД может быть выражено следующим образом:
на обмотках полюсов ТЭД может быть выражено следующим образом:

Увеличение угловой скорости вращения колеса при потере сцепления приведет к увеличению ЭДС  якоря ТЭД и уменьшению тока iЯ якоря. Последнее приведет к появлению ЭДС самоиндукции обмоток ТЭД, сонаправленной с током, и резкому снижению напряжения UОВ на обмотках полюсов ТЭД, вплоть до смены знака напряжения. Увеличение тока цепи ТЭД приведет, напротив, к появлению ЭДС самоиндукции обмоток противоположного направления и резкому увеличению напряжения на обмотках.
якоря ТЭД и уменьшению тока iЯ якоря. Последнее приведет к появлению ЭДС самоиндукции обмоток ТЭД, сонаправленной с током, и резкому снижению напряжения UОВ на обмотках полюсов ТЭД, вплоть до смены знака напряжения. Увеличение тока цепи ТЭД приведет, напротив, к появлению ЭДС самоиндукции обмоток противоположного направления и резкому увеличению напряжения на обмотках.
Таким образом, изменение напряжения на обмотках ТЭД, вызванное изменением угловой скорости колесной пары, не только не демпфируется индуктивностями обмоток, но, напротив, усиливается ими, полностью сохраняя информацию об изменении угловой скорости. Использование этой информации дает возможность существенно повысить быстродействие системы обнаружения боксования и юза, а следовательно, повысить эффективность всей противобоксовочной и противоюзной защиты.
Этот вывод подтверждается результатами обработки значений напряжения на обмотке возбуждения ТЭД в соответствии с заявляемым способом. Из исходного массива значений напряжения, полученного его измерением с дискретностью 10 мкс, формировалась выборка из 256 значений, в которую включался каждый сотый элемент исходного массива. Таким образом, сформированная выборка включала 256 отсчетов напряжения на обмотках полюсов ТЭД, взятых с периодом 0.001 сек. Эта выборка подвергается дискретному преобразованию Фурье (ДПФ) (А.Б. Сергиенко. Цифровая обработка сигналов. - СПб.: Питер, 2002 - стр. 250), в результате которого определяются амплитуды гармонических составляющих сигнала. Разрешение спектра по частоте составит 1/(256*0.001)=3.906 Гц. Учитывая осевую симметрию спектра, вычисляемая ширина спектра составит 128*3,906=500 Гц.
На фиг. 4 и фиг. 5 представлены результаты спектрального анализа двух выборок отсчетов значений напряжения на обмотках полюсов ТЭД при устойчивом, без боксования, движении колесной пары.
Амплитуды низкочастотных (до 20 Гц) гармоник напряжения Uов, соответствующих пульсациям угловой скорости колесной пары при движении на пределе сцепления, в обоих фрагментах не превосходят 6 В и существенно уступают по величине амплитудам гармонических составляющих в других областях спектра.
На отметке 29,8 сек фрагмента угловая скорость вращения колесной пары начинает возрастать с ускорением примерно 4 сек-2, что свидетельствует о снижении момента сцепления, т.е. переходе рабочей точки пары «колесо-рельс» из точки А в точку Б на фиг. 2. Уже через 0.03 сек после начала ускорения колесной пары низкочастотная область спектра заметно изменяется, уровень амплитуд гармоник порядков 1-5 возрастает и в среднем превосходит, хотя пока и не намного, уровень амплитуд гармоник более высоких порядков (фиг. 6).
По мере увеличения развития боксования эти изменения становятся все более заметными (фиг. 7), при этом они не исчезают при уменьшении угловой скорости в процессе фрикционных колебаний при движении на пределе сцепления (фиг. 8), отражая неустойчивый характер движения колеса в районе точки Б кривой сцепления (фиг. 2).
На отметке 30,12 сек имеет место увеличение угловой скорости колесной пары с ускорением примерно 10 сек-2 с последующим ее снижением в процессе колебаний. Этот процесс сопровождается еще большим увеличением амплитуд гармоник низкочастотной области спектра (фиг. 9).
После восстановления устойчивого сцепления колебания угловой скорости колесной пары прекращаются, что приводит к уменьшению уровня амплитуд гармонических составляющих низкочастотной области спектра (фиг. 10).
Таким образом, колебания угловой скорости колеса при движении на пределе сцепления с рельсами в процессе реализации тягового или тормозного момента приводят к увеличению амплитуды и энергии низкочастотных гармонических составляющих напряжения на обмотке возбуждения полюсов ТЭД в ограниченной информативной полосе его амплитудно-частотного спектра. При этом остальная часть спектра существенных изменений не претерпевает.
Границы информативной области спектра определяются инерционными характеристиками звеньев тягового привода (колесной пары, якоря тягового электродвигателя) и индуктивностью обмоток полюсов тягового электродвигателя. Для тягового привода тепловоза серии 2ТЭ116У эта область включает гармонические составляющие порядка 1-5 с частотами 4-20 Гц. Границы информативной области амплитудно-частотного спектра напряжения на полюсах ТЭД для тяговых приводов локомотивов других серий и иных транспортных средств с электрической передачей постоянного тока определяются экспериментально в результате анализа изменения параметров привода при движении на пределе сцепления колес с рельсами.
В качестве объективного вычисляемого показателя, отражающего изменение амплитудного спектра напряжения на полюсах ТЭД при реализации предельных значений тягового или тормозного момента, может использоваться относительная мощность гармоник информативной области спектра. Согласно теореме Парсеваля (А.Б. Сергиенко. Цифровая обработка сигналов. - СПб.: Питер, 2002 - стр. 55), квадрат нормы сигнала, пропорциональный его мощности в заданном временном интервале, равен сумме квадратов амплитуд гармонических составляющих сигнала в этом интервале. Тогда мощность, приходящаяся на определенную область спектра, может быть вычислена как сумма квадратов амплитуд гармонических составляющих, попадающих в эту область.
Мощность гармоник информативной области спектра напряжения на обмотках полюсов ТЭД, приведенная к сопротивлению 1 Ом:

где k - порядок гармоники;
k1, k2 - порядок граничных гармоник информативной полосы спектра (k1<k2), для тягового привода тепловоза 2ТЭ116У k1=1, k2=5;
Ak - амплитуда гармоники k-го порядка, В.
Недостатком этого показателя с точки зрения использования его для обнаружения предельных по сцеплению режимов движения колесной пары является зависимость его от абсолютных значений амплитуд гармонических составляющих.
С целью исключения этого недостатка в качестве объективной количественной оценки изменения спектра при боксовании колесной пары предлагается использовать относительную мощность, приходящуюся на гармоники информативной области спектра и вычисляемую по формуле:

где k3 - порядок гармоники, ограничивающей ширину контролируемой области спектра (k3≥k2).
Ширина контролируемой области спектра, энергия которой используется в качестве базового значения для вычисления относительной мощности, определяется одновременно с границами информативной области экспериментальным способом. Для тягового привода тепловоза 2ТЭ116У k3=20.
Изменение значения показателя (5) в течение 1 сек при движении на пределе сцепления представлено на графике (фиг. 11). Анализ его показывает, что использование данного показателя позволяет выявить изменение скольжения колесной пары на 1-1,5% в течение 0.03-0.05 сек, что позволяет своевременно принять меры по предотвращению дальнейшего развития боксования или юза.
В зависимости от текущего значения (5) показателя и характера его изменения возможна реализация многоступенчатой защиты с применением разных способов воздействия на тяговый привод с целью ограничения проскальзывания колесной пары. Один из возможных вариантов такой защиты представлен в таблице.
Использование предлагаемого способа позволит повысить тяговые и тормозные свойства локомотивов и иных рельсовых транспортных средств с тяговыми электродвигателями постоянного тока за счет своевременного обнаружения повышенного проскальзывания колес и уменьшения потерь силы тяги и тормозного усилия при его ликвидации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обнаружения боксования и юза колес транспортного средства с электрической передачей | 2018 |
|
RU2702549C1 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ БОКСОВАНИЯ КОЛЕСНЫХ ПАР ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2013 |
|
RU2540223C1 |
| Устройство для регулирования силы тяги и торможения электроподвижного состава при автоматическом управлении | 2019 |
|
RU2739552C1 |
| МИКРОПРОЦЕССОРНАЯ СИСТЕМА ЗАЩИТЫ ОТ БОКСОВАНИЯ ДЛЯ ЭЛЕКТРОВОЗОВ ПОСТОЯННОГО ТОКА | 2009 |
|
RU2440898C2 |
| Электропривод транспортного средства | 1984 |
|
SU1286448A1 |
| СИСТЕМА СМЕШАННОГО ВОЗБУЖДЕНИЯ ТЯГОВЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ ЭЛЕКТРОВОЗА | 2008 |
|
RU2371332C1 |
| Устройство для управления тяговым электроприводом электровоза | 1985 |
|
SU1299850A1 |
| Устройство защиты от боксования и юза | 1986 |
|
SU1411172A1 |
| СТЕНД ДЛЯ МОДЕЛИРОВАНИЯ ДИНАМИЧЕСКИХ ПРОЦЕССОВ В ТЯГОВОМ ПРИВОДЕ ЛОКОМОТИВА С ЭЛЕКТРОПЕРЕДАЧЕЙ | 2012 |
|
RU2496100C1 |
| ЭЛЕКТРИЧЕСКАЯ ПЕРЕДАЧА ТЕПЛОВОЗА | 2011 |
|
RU2467899C1 |





Изобретение относится к способу, указывающему на пробуксовку или юз колес транспортных средств с электротягой. Способ обнаружения боксования и юза колес транспортного средства с электрической передачей постоянного тока заключается в следующем. Выходной сигнал датчика одного из параметров цепи тягового электродвигателя подвергают спектральному анализу. В результате анализа определяют амплитудно-частотную характеристику сигнала и контролируют уровень амплитуд гармонических составляющих сигнала. В качестве параметра цепи тягового электродвигателя используют падение напряжения на обмотках полюсов тягового электродвигателя. Боксование и юз определяют по увеличению относительной мощности гармонических составляющих амплитудно-частотного спектра выходного сигнала датчика в ограниченной полосе частот, определяемой инерционными характеристиками тягового привода транспортного средства. Технический результат изобретения заключается в повышении чувствительности системы обнаружения боксования и юза колес танспортного средства с электропередачей. 1 табл., 11 ил.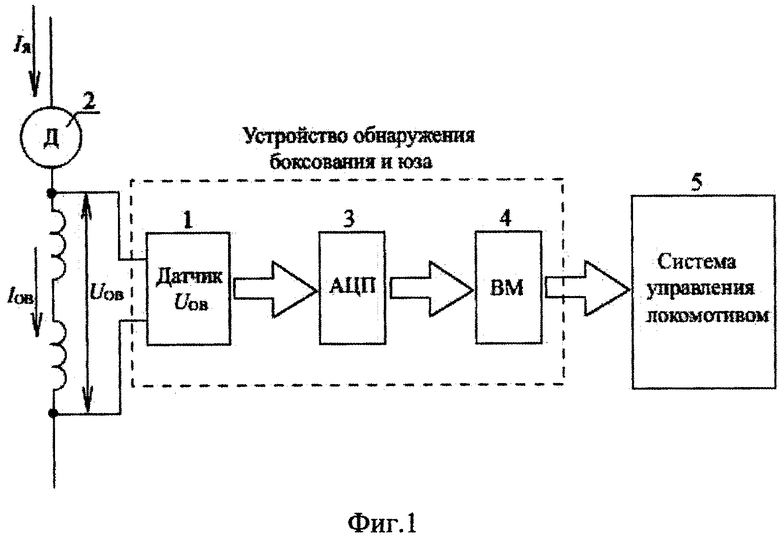
Способ обнаружения боксования и юза колес транспортного средства с электрической передачей постоянного тока, состоящий в том, что выходной сигнал датчика одного из параметров цепи тягового электродвигателя подвергают спектральному анализу, в результате которого определяют амплитудно-частотную характеристику сигнала и контролируют уровень амплитуд гармонических составляющих сигнала, отличающийся тем, что в качестве параметра цепи тягового электродвигателя используют падение напряжения на обмотках полюсов тягового электродвигателя, а боксование и юз определяют по увеличению относительной мощности гармонических составляющих амплитудно-частотного спектра выходного сигнала датчика в ограниченной полосе частот, определяемой инерционными характеристиками тягового привода транспортного средства.
| Клепиков, В.Б., А.В | |||
| Тимощенко | |||
| Комбинированное определение буксования и юза колес рудничного электровоза с использованием программируемой логической интегральной схемы | |||
| Вестник Национального технического университета "ХПИ": сб | |||
| науч | |||
| тр | |||
| - Харьков, 2015 | |||
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| Нефтяной конвертер | 1922 |
|
SU64A1 |
| Устройство обнаружения боксования и юза колес транспортного средства с электрической передачей | 1988 |
|
SU1641665A1 |
| WO 2005079504 A2, 01.09.2005 | |||
| Прибор для определения силы трения между отливкой и литейной формой | 1961 |
|
SU141267A1 |

