Изобретение относится к рельсовому транспорту, в частности к устройствам обнаружения буксования колес по статистическим характеристикам вибросигнала в механической части тягового привода, свидетельствующим о переходе привода из режима тяги в режим реализации предельного по сцеплению тягового момента с последующим буксованием.
Известны устройства обнаружения буксования колесных пар, принцип действия которых основан на измерении скорости скольжения (избыточного вращения) колесной пары либо непосредственно с помощью устройств, использующих, например, магнитные метки на колесе и рельсе [1], либо путем сравнения скорости ее вращения со скоростями вращения остальных (не буксующих) колесных пар, например по току якоря тягового электродвигателя [2].
Недостатком устройств, отслеживающих скорость скольжения колесной пары, является то, что они срабатывают тогда, когда буксование уже началось (сцепление колес перешло в скольжение, результатом чего является увеличение угловой скорости колесной пары) и, чтобы его прекратить, необходимо восстановить сцепление колеса с рельсом: подать под колеса песок или существенно (на 30-40%) снизить тяговый момент, вращающий колесную пару.
Известно устройство [3] обнаружения буксования и юза по наличию колебаний в механической части привода колесной пары, которое является наиболее близким по технической сущности к заявленному устройству.
Устройство состоит из двух каналов обнаружения буксования и юза, датчика колебаний механической части привода колесной пары. Первый канал содержит последовательно соединенные первый полосовой фильтр, первый выпрямитель, первый сглаживающий фильтр и первый пороговый элемент. Второй канал содержит последовательно соединенные второй полосовой фильтр, второй выпрямитель, второй сглаживающий фильтр и второй пороговый элемент. Выход датчика связан с входами первого и второго полосовых фильтров. Выходы первого и второго пороговых элементов подключены соответственно к первому и второму входам элемента ИЛИ.
Принцип его работы основан на способности реагировать на динамические процессы в тяговом приводе, характерные только для тех условий, когда колесная пара достигает предела по сцеплению колес с рельсом и затем переходит в режим буксования. При достижении предела по сцеплению происходит изменение структуры системы "колесо-рельс", что приводит к изменению собственных частот и форм колебаний колесной пары и привода.
Для этого состояния в одностороннем тяговом приводе характерно проявление высокочастотной формы колебаний с узлом в оси колесной пары, когда колебания колес происходят с противоположными фазами. Изменяют свою амплитуду и частоту и низкочастотные колебания системы "якорь тягового двигателя - колесная пара".
Настроенные на указанные частоты полосовые фильтры выделяют из общего частотного спектра колебаний только частоты, характерные для переходного состояния привода (от режима тяги к режиму буксования). Процесс колебаний, регистрируемый датчиком, можно достаточно точно считать центрированным, т.е. имеющим нулевую среднюю составляющую, поэтому выпрямление и сглаживание сигнала, применяемое в устройстве [3], формирует некоторый усредненный уровень амплитуды колебаний в выделенном частотном диапазоне. Затем осуществляется сравнение его с заранее заданным уровнем в пороговом устройстве. Логическое устройство обобщает результаты оценки интенсивности колебаний (низкой или высокой частоты) в выделенных частотных диапазонах и вырабатывает оповещающий (или управляющий) сигнал.
Основным недостатком устройства [3] является сравнение уровня интенсивности колебаний в выделенных фильтрами частотных диапазонах с заранее установленным уровнем.
Однако правильно установить уровень срабатывания порогового устройства практически невозможно, так как уровень сравниваемого сигнала может существенно меняться в зависимости от состояния рельсового пути, скорости движения локомотива, технического состояния тягового привода и пр. Неточно установленный уровень срабатывания порогового устройства приводит либо к ложным срабатываниям, либо к недопустимому снижению чувствительности устройства.
В указанных частотных диапазонах присутствуют не только колебания крутильной системы "привод - колесная пара". В них проявляются также гармоники колебаний (вертикальных, поперечных) колесной пары и ходовой части локомотива на упругом пути, зубцовые составляющие колебаний тяговой передачи и пр. Интенсивность крутильных и прочих колебаний различна на различных скоростях движения. Вклад каждой из составляющих в общую интенсивность колебаний даже в ограниченном частотном диапазоне не является постоянным. Их соотношение зависит от ряда непредсказуемых факторов и изменяющихся в широких пределах параметров: состояние пути, износ элементов привода, тяговой передачи и ходовой части, режим нагружения, сезон (от него зависит, например, жесткость пути).
Из-за широкого разброса параметров регистрируемых сигналов результат сравнения их уровня с некоторой заданной однажды постоянной величиной не может считаться достоверным информативным признаком чего-либо вообще, а в частности - начала переходного процесса.
Поэтому достоверность прогноза такого устройства недостаточна, а эффективность его сомнительна.
Второй канал обнаружения высокочастотной формы колебаний устройства [3] не несет дополнительной информации о динамических режимах двусторонних тяговых приводов, которыми оснащены все грузовые электровозы бывшего СССР и России. По результатам динамических расчетов в двустороннем тяговом приводе даже при уже развившемся процессе буксования высокочастотная форма колебаний с узлом в оси колесной пары невозможна, ее отсутствие многократно подтверждено экспериментально.
Изобретением решается задача повышения достоверности информации о наступлении предельных по условиям сцепления режимов работы тягового привода для обеспечения устойчивой реализации максимальных тяговых качеств локомотива и раннего обнаружения и предупреждения буксования колесных пар.
Это достигается тем, что в устройстве обнаружения предельных по сцеплению режимом работы тягового привода рельсового транспорта, содержащем датчик колебаний механической части привода колесной пиры, полосовой фильтр, настроенный на информативный частотный диапазон, согласно изобретения функцию выпрямления и сглаживания сигнала с датчика колебаний выполняют аналого-цифровой преобразователь и блоки формирования признаков текущего режима и устойчивого режима тяги, представляющие собой соответственно статистические характеристики сигнала за малое и большое время его реализации. Функцию порогового устройства выполняет блок сравнения, в котором сравниваются статистические характеристики текущего режима и устойчивого режима тяги, и по результату сравнения классифицируется текущий режим работы привода. Вход блока формирования статистических характеристик устойчивого режима тяги подключен к выходу полосового фильтра и к собственному выходу через переключатель, управляемый логическим сигналом с выхода блока сравнения.
Таким образом, заявляемое устройство адаптируется к условиям эксплуатации, постоянно формируя и запоминая характерные параметры устойчивого режима тяги и принимая их за эталонные, сравнивает с ними параметры процесса, протекающего в данный момент. По степени отклонения параметров текущего режима от параметров, соответствующих устойчивому режиму тяги, в блоке сравнения вырабатывается сигнал, свидетельствующий о переходе от режима тяги к режиму буксования.
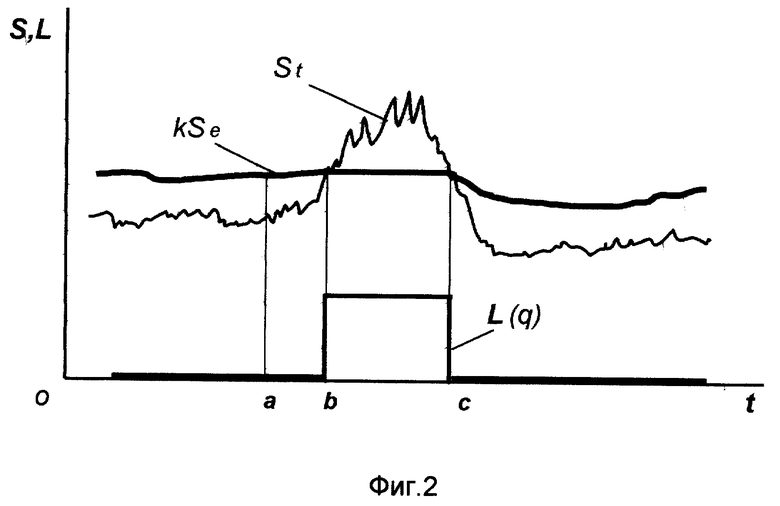
На фиг. 1 представлена схема устройства, на фиг. 2 - временная диаграмма сигналов, формируемых блоками.
Устройство состоит из датчика вибросигнала 1, установленного на механической части привода колесной пары, аналого-цифрового преобразователя 2, полосового фильтра 3, блока формирования уровня текущего сигнала 4, блока формирования уровня эталонного сигнала 5, блока сравнения уровней сигнала и классификации динамических режимов работы привода 6, управляемого переключателя 7.
Устройство работает следующим образом.
Сигнал с датчика 1 поступает на вход аналого-цифрового преобразователя 2, где происходит его преобразование в цифровой временной ряд, который поступает на вход полосового фильтра 3. После фильтрации сигнал содержит информацию о процессах, протекающих только в определенном частотном диапазоне, в котором их характерные свойства проявляются наиболее ярко. С выхода полосового фильтра сигнал поступает на вход блока 4 и через логический переключатель 7 на вход блока 5. В блоке 4 формируется уровень сигнала, соответствующий текущему динамическому режиму, St - статистические характеристики временного ряда, вычисляемые за малый промежуток времени. В блоке 5 формируются эталонный уровень сигнала Se - статистические характеристики временного ряда, вычисленные за длительный промежуток времени. Таким образом, параметр St практически повторяет изменение интенсивности колебательного процесса в приводе, а параметр Se изменяется медленно, оставаясь почти постоянным и равным некоторой средней величине, соответствующей стационарному тяговому режиму.
С увеличением, например, скорости движения локомотива или с ухудшением состояния пути интенсивность колебаний в приводе возрастает, что приводит к возрастанию параметров Se и St, но их отношение остается постоянным до тех пор, пока в приводе не возникнет нестационарный (переходный) процесс, приводящий к резкому изменению интенсивности колебаний.
В момент отклонения от стационарного режима параметр St быстро изменяется (увеличивается), а параметр Se, реагирующий на резкие изменения с существенным запаздыванием, еще некоторое время сохраняет значение, мало отличающееся от своего прежнего значения, соответствовавшего стационарному режиму.
Блок 6 классифицирует режим работы привода по величине q = St/(kSe), где k - постоянный коэффициент, определяющий чувствительность устройства и устанавливаемый при его регулировке (k > 1).
Если q < 1, то имеет место устойчивый режим тяги (или выбега).
Если q ≥ 1, то начался переходный режим или режим буксования.
Изменение от времени величин St и kSe, а также сигнала на выходе блока 6 - L(q) показаны на фиг. 2.
До момента времени a привод находился в режиме тяги - L(q) = 0. С момента времени a начался переходный процесс, сопровождающийся ростом величины St. Величина kSt при этом практически не изменяется. В момент времени b выполняется условие q ≥ 1 и срабатывает блок 6 - L(q) = 1. Управляемый логическим сигналом блока 6 переключатель 7 отключает вход блока 5 от выхода полосового фильтра 3 и соединяет между собой вход и выход блока 5. Величина Se циркулирует в блоке 5, сохраняя свой средний уровень, и стремится к постоянной величине, соответствующей предыдущему режиму тяги. С момента времени b по сигналу блока 6 включаются противобуксовочные системы локомотива: снижается тяговый момент или подается песок. Переходный процесс прекращается и величина St снижается. В момент времени с выполнятся условие q < 1, срабатывает блок 6, переключатель 7 подключает вход блока 5 к источнику реального сигнала - к выходу полосового фильтра 3. Таким образом устройство снова готово к работе по своему назначению.
Основное преимущество заявляемого устройства по сравнению с устройством [3] состоит в том, что оно способно адаптироваться к условиям эксплуатации за счет того, что медленное изменение интенсивности колебаний привода под воздействием объективных факторов (скорость движения, износ ходовой части локомотива, сезон и пр.) изменяет одновременно и величину kSe, и величину St, но не изменяет их отношения в условиях устойчивого режима тяги, сохраняя при этом чувствительность к переходным неустойчивым режимам. Этим достигается высокая точность прогноза и достоверность раннего обнаружения переходных режимов и режимов буксования.
Применение цифровой обработки сигналов увеличивает преимущества заявляемого устройства по сравнению с устройством [3] за счет возможности изменения и усовершенствования алгоритма обработки сигналов.
Кроме того, применение многоканального аналого-цифрового преобразователя и быстродействующего процессора позволяет в одном электронном блоке практически реализовать сразу несколько (по числу колесных пар одной секции локомотива) заявляемых устройств.
Такой подход делает заявляемое устройство дешевле и, учитывая высокое качество работы и возможности современных микропроцессоров, надежнее, чем устройство [3].
Источники информации
1. Справочник по электроподвижному составу, тепловозам и дизель-поездам. Под общ. ред. А.И.Тищенко. Т. II. М., "Транспорт", 1976, 376 с.
2. Измерение проскальзывания колеса для автоматического регулирования тягового и тормозного усилия. Экспресс-информация ВИНТИ, Локомотивостроение и вагоностроение, N 36, 1969. Москва.
3. Патент на изобретение N 2071197 (Российская Федерация). Устройство обнаружения буксования и юза колес реального транспортного средства. /Павленко А.П., Павленко А.А. и др./ Опубл. Бюл. изобр. N 6, 1997.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПРОГНОЗИРОВАНИЯ БУКСОВАНИЯ КОЛЕСНЫХ ПАР РЕЛЬСОВОГО ТРАНСПОРТА | 2018 |
|
RU2708522C1 |
| СПОСОБ УПРАВЛЕНИЯ ТЯГОВЫМ ЭЛЕКТРОПРИВОДОМ ЛОКОМОТИВА НА ПРЕДЕЛЕ ПО СЦЕПЛЕНИЮ КОЛЕС С РЕЛЬСАМИ | 2010 |
|
RU2446063C2 |
| Устройство для увеличения сцепления ведущих колес локомотива с рельсами | 2019 |
|
RU2717413C1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ БОКСОВАНИЯ И ЮЗА КОЛЕСНЫХ ПАР ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 1991 |
|
RU2025310C1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОПОДВИЖНЫМ СОСТАВОМ | 1972 |
|
SU333079A1 |
| Способ обнаружения боксования и юза колес транспортного средства с электрической передачей | 2016 |
|
RU2657157C1 |
| Устройство обнаружения боксования и юза колес транспортного средства с электрической передачей | 1986 |
|
SU1418104A1 |
| Противобоксовочное устройство для тепловоза | 1978 |
|
SU787204A1 |
| Устройство для обнаружения начала процесса буксования колесных пар локомотива | 2021 |
|
RU2758991C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ НАЧАЛА ПРОЦЕССА БУКСОВАНИЯ КОЛЕСНЫХ ПАР ЛОКОМОТИВА | 2011 |
|
RU2489286C2 |
Изобретение относится к рельсовому транспорту, в частности к устройствам обнаружения буксования колес по статистическим характеристикам вибросигнала в механической части тягового привода, свидетельствующим о переходе привода из режима тяги в режим реализации предельного по сцеплению тягового момента с последующим буксованием. Устройство содержит датчик, установленный на механической части тягового привода, который вырабатывает вибросигнал, поступающий на вход аналого-цифрового преобразователя, выход которого связан с входом полосового фильтра. С выхода полосового фильтра сигнал поступает на вход блока формирования уровня сигнала. Блок формирования уровня через логический переключатель связан с входом блока, формирующего эталонный уровень сигнала. Устройство постоянно формирует и сравнивает два параметра сигнала - текущий и эталонный. По степени рассогласования указанных параметров вырабатывается логический сигнал, соответствующий началу перехода к режиму буксования. Технический результат заключается в повышении достоверности информации о наступлении предельных по условиям сцепления режимов работы тягового привода для обеспечения устойчивой реализации максимальных тяговых качеств локомотива и раннего обнаружения и предупреждения буксования колесных пар. 2 ил.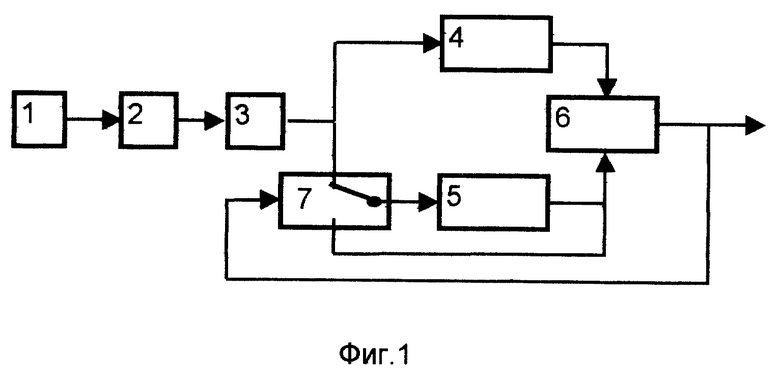
Устройство для обнаружения предельных по сцеплению режимов работы тягового привода рельсового транспортного средства, содержащее датчик колебаний механической части привода колесной пары, полосовой фильтр, настроенный на информативный частотный диапазон, и цепи формирования уровня сигнала, отличающееся тем, что цепь формирования уровня сигнала выполнена в виде аналого-цифрового преобразователя и подключенных к нему через фильтр блоков формирования эталонного и текущего уровней сигнала и соответствующих им статистических характеристик за малое и большое время реализации режима тяги, при этом выходы блоков формирования уровней соединены с входами блока сравнения, выполняющего функцию порогового устройства и классификации динамических режимов работы тягового привода, причем блок формирования эталонного уровня сигнала подключен к выходу фильтра и к собственному выходу через переключатель, управляемый логическим сигналом с выхода блока сравнения.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ЭЛЕКТРИЧЕСКИЙ АККУМУЛЯТОР | 1922 |
|
SU552A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |

