(54) ; УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ НЕЙРОНА
3 ..,:Г
блока экстремального регулирования динамического порога активации нейрона, причем к выходу устройства через регулируемый источник энергии, подключен третий вход второго функционального преобразователя, выход которого является выходом устройства, а четвертый вход - соединен с выходом блока пространственио-временного суммирования и со входом блока дифференцирования, второй вход первого фзнкционального преобразователя соединен с выходом второго функционального преобразователя, входь блока пространственно-временного суммирования являются входами устройства.
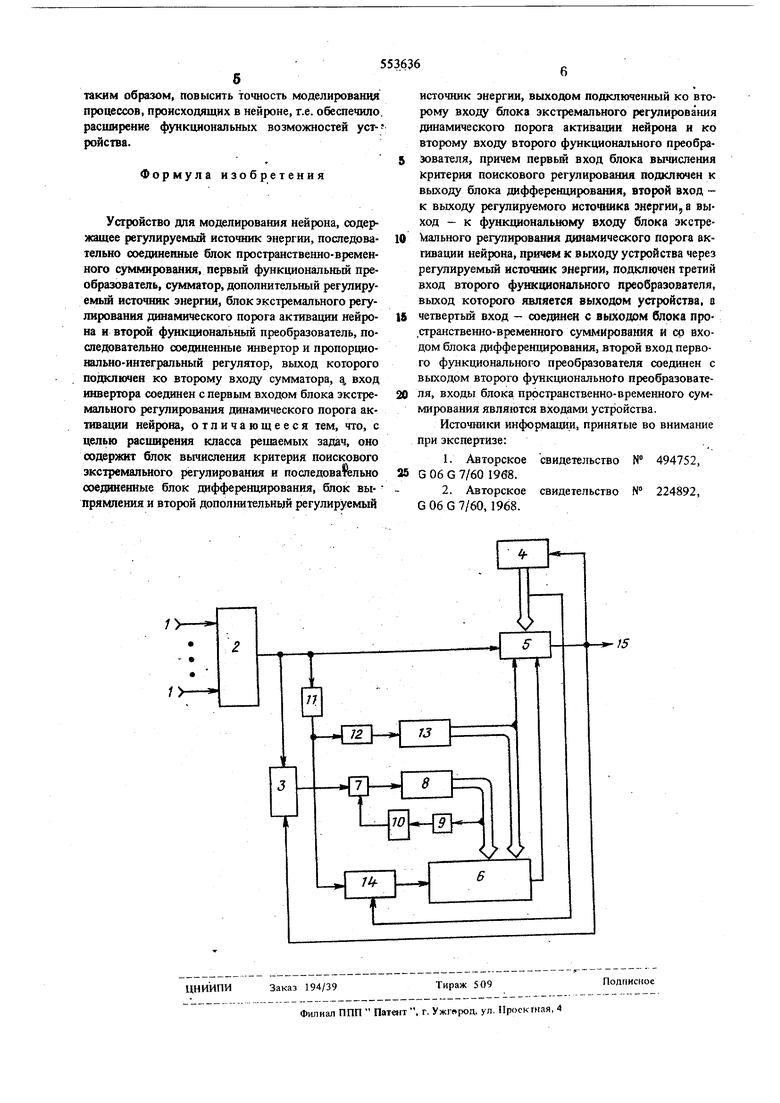
На чертеже изображена блок-схема предлагаемого устройства.
Устройство содержит п входов 1, подключенных к блоку 2 пространственно-временного суммирования, первый функциональный преобразова-. тель 3, регулируемый источник 4 энергии, второй функциональный преобразователь 5, блок 6 экстремального регулирования динамического порога активащш нейрона, сумматор 7, первый дополнительный регулируемый источник 8 энергии, инвертор 9, пропорционально-интегральный регулятор- .10, блок 11 дифференцирования, блок 12 вьШр ямле- ния, второй дополш€тельный регулируемьш источник 13 энергии, блок 14 вычисления критерия поискового экстремального регулирования и выход 15 (потоки энергии на «хеме обозначены двойными стрелками).
Принцип работы предлагаемого устройства соетой т в следующем. На входы 1 поступают входные воздействия Х| (i 1,..., п), суммирующиеся в блоке 2 пространственно-временного суммирова- ния, выходом которого является величина суммарного входного воздействия XBX- функциональном преобразователе 3, реализующем функвдю БВХ FI (вх Y ) эта величина преобразуется в величину сигнала, характеризующего уровень дисбаланса энергии ЕВХ. вызванного входным воздействием, причем величина выходного сигнала нейрона выступает в качестве одного из аргументов функции FI .
Помимо функционального преобразователя 3, величина суммарного входного воздействия XBX поступает на блок 11 дафференцирования, осуществляющий функциональное преобразова ше этой величины в сигнал, характеризующий уровень дисбаланса энергии KBX вызванного скоростью измерения входного воздействия:
(2) а
Е - V
(t).. -bxdt ьх
Результаты нейроцитохимических экспериментов позволяют сделать вьшод о целесообразности введения в модель нейрона трех регулируемых источников энергии - блоки 5,8 и 13 - реапиэуюцц1х соответственно функции:
)(,(а-.к)
П ГР 7 Р п ) 1-, (2).,iZ),Ep )
где S - дискретное время;
к - целое положительное число;
Г( « ) - единичная функция Хэвисайда. Преобразование li осуществляется в блоке 12 выпрямления, полярность включения которого такова, что он пропускает люль отрицательные сигналы. Параметры регулируемых источников знергии 8 и 13 подбираются таким образом, чтобь в момент
(2/ - -
прихода тормозного сигнала величииа Е-значительно превышала бы величину Ер
Регуляторные составляющие питающей знергии Ер и Е атрачиваются на функционирование основного регуляторного механизма нейрона - блока 6 поискового экстремального регулирования, который , изменяя динамический порог h активации
нейрона, влияет как параметр на функциональный преобразователь 5, преобразующий суммарный входной сигнал XBX нейрона в выходной сигнал Y, т.е. реализующий функцию:
Y FI (Хвх|Ь Ер,) л В этом выражении Ер
выступает как информационный сигнал об уровне энергии. Ер ,
Цель экстремального регулирования - минимизация как энергетических затрат на функциональное поведение нейрона (), так и уровня
Д 1сбаланса энергии, обусловленного скоростью изменениЯ(1, суммарного входного воздействия ( ) вырабатывается в блоке 14 вычисления критерия поискового экстремального регулирования, реализуюц1ем функцию:
(Еф,):
Информационный сигнал об уровне энергии Ер подается через инвертор 9 на вход пропорциональноинтегрального регулятора 10, выход которого Z , через сумматор 7, где он суммируется с сигналомЕВХ поступает на вход первого дополнительного источника 8 энергии регулирования при возбуждении и торможении. Коэффициент интегрирования пропорционально-интегрального регулятора 10 подбирается в соответствии с инерционными характерйстиками источника 8 энергии и с характерным временем отслеживания экстремума функции Q с помощью блока 6 экстремального регулирования. В свою очередь, пропорционально-интегральный регулятор 10,сводя к,нулю затраты энергии на процесс
активного поискового экстремального регулирования Ер%тключает блок 6 экстремального регулирования после достижения системой автоматического поиска минимального значения функции Q.
Таким образом, введение указанных блоков и
соответствующих связей позволило воспроизвести наблюдаемый в цитохимических экспериментах факт интенсивных кратковременных энергетических затрат в нейроне, возникающих в момент прихода на него тормозного сигнала (т.е. в первую
очередь фазу процесса затормаживания нейрона), и
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования адаптивного нейрона | 1975 |
|
SU553635A1 |
| Устройство для моделирования адаптивного нейрона | 1975 |
|
SU561198A1 |
| Устройство для моделирования адаптивного нейрона | 1977 |
|
SU708368A1 |
| Устройство для моделирования адаптивного нейрона | 1975 |
|
SU565306A1 |
| Устройство для моделирования нейтрона | 1976 |
|
SU647699A1 |
| КОМАНДНЫЙ БЛОК ДЛЯ ЭКСТРЕМАЛЬНОГО РЕГУЛЯТОРА | 2011 |
|
RU2475797C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С ЭКСТРЕМАЛЬНЫМ УПРАВЛЕНИЕМ | 1992 |
|
RU2069034C1 |
| Устройство для моделирования адаптивного нейроно-глиального комплекса | 1979 |
|
SU773649A1 |
| Устройство для моделирования распределения потоков энергии в экологических и биологических системах | 1980 |
|
SU945874A1 |
| Система автоматического регулирования режима работы пылеприготовительной установки | 1984 |
|
SU1284595A1 |
