Изобретение относится к автоматизации технологических процессов и может быть использовано при экстремальном регулировании расхода воздуха при горении топлива в энергетической горелке по какому-либо показателю или расхода одного из сырьевых потоков при одновременном синтезе нескольких продуктов в химическом реакторе.
Целью изобретения является внедрение в системах автоматизации технологических процессов простых и надежных схем экстремального регулирования.
В заявке предлагается командный блок (КБ) для реализации алгоритма автоматического экстремального регулирования в одноконтурных схемах с исполнительными механизмами (ИМ) постоянной скорости, например типа МЭО, МЭМ или МЭП, а также в каскадных схемах с контроллерами промышленных программно-технических комплексов, например, типа КВИНТ, КОНТАР, ОВЕН, СИМЕНС и др.
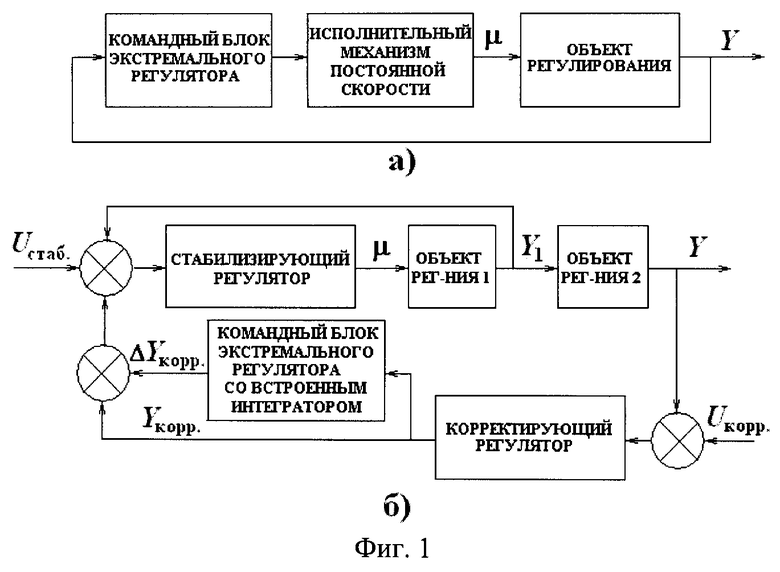
На фиг.1 показаны два варианта схем реализации экстремального регулирования с использованием предлагаемого КБ. На фиг.1,а показана одноконтурная схема, в которой КБ формирует последовательность импульсов для управления ИМ постоянной скорости, а на фиг.1,б показана каскадная схема, в которой КБ корректирует задание стабилизирующему регулятору.
Для поиска экстремума предлагаемый КБ использует идею известного в математике шагового способа [Иващенко Н.Н. Автоматическое регулирование. Теория и элементы систем. М.: Машиностроение, 1973. - 606 с.], сущность которого может быть показана, например, для статической характеристики оптимизируемого объекта с параболической функцией цели вида

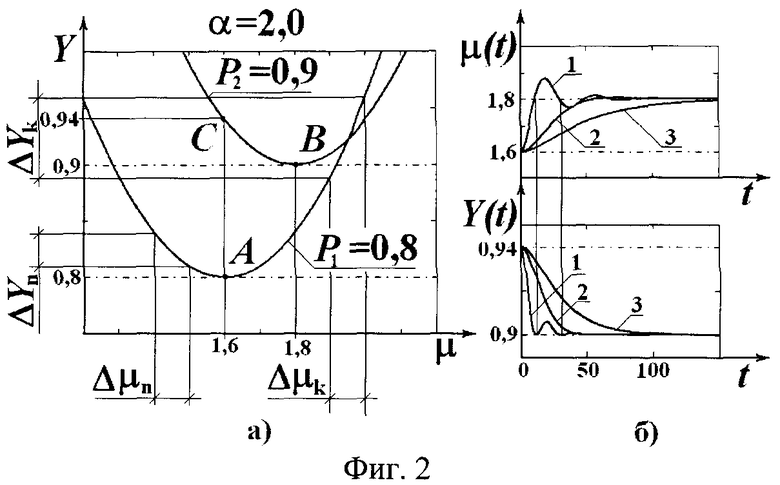
На фиг.2,а показан график функции (1), из которого видно, что при Δµ0,k>0, если ΔY0,k<0, то на следующем шаге следует продолжать движение Δµ0,k+1>0; а случае, если при Δµ0,n>0 окажется, что ΔY0,n>0, то направление движения к оптимуму должно быть противоположным Δµ0,n+1<0. Из этого следует достаточно простое выражение для формулы, определяющей стратегию поиска оптимума в шаговом режиме
где знак «+» для задачи максимизации, а знак «-» для задачи минимизации. В окрестности оптимума работающий по рассмотренному способу экстремальный регулятор (ЭР) будет постоянно генерировать колебания в системе управления.
Из-за инерционности объектов управления действия высокочастотных возмущений, шумов в каналах измерения, а также колебаний, вызванных работой других регуляторов системы управления, результаты измерений Y(t) не соответствуют k-му статическому состоянию управляемого объекта Y0,k.
В известных алгоритмах экстремального регулирования для исключения указанного несоответствия выбирают фиксированный интервал времени Δτ между шагами работы ЭР больше времени переходных процессов в объекте управления. В малоинерционных электрических и электромеханических системах это оправдано. В теплотехнических объектах управления в теплоэнергетике, химии и других отраслях, в которых объекты управления имеют значительную инерционность, увеличение времени шага Δτ приводит к снижению эффективности экстремального регулирования. А при работе ЭР совместно с другими регуляторами системы (см. фиг.1) и при действии высокочастотных возмущений и шумов в канале измерения выбор фиксированного интервала времени Δτ становится проблемным.
Из теории автоматического управления [Ротач В.Я. Теория автоматического управления: Учебник для вузов. - 2-е изд., перераб. и доп. - М.: Издательство МЭИ, 2004. 400 с., ил.] следует, что, работая в одной из показанных на фиг.1 схем, ЭР должен за минимальное время переводить объект управления из начального состояния в состояние, при котором показатель оптимизируемой функции (1) достигнет минимального или максимального значения. Работа его не должна приводить к потере устойчивости системы регулирования, а колебания в окрестности оптимума по частоте и амплитуде должны быть технологически допустимыми. На фиг.2,б показаны графики переходных процессов на входе Y(t) и на выходе µ(t) при переводе объекта управления из одного в другое стационарное состояние для трех значений параметров настроек ЭР. Видно, что режим 1 самый быстродействующий. Однако для экстремального регулятора такое быстродействие не оправданное. При таком быстродействии ЭР реагирует на высокочастотные возмущения и влияет на устойчивость работы других регуляторов системы управления. Режим 3 неоправданно затянут, а режим 2 завершается за минимальное время без колебаний.
Для перевода инерционных объектов из одного состояния в другое за минимальное время и без нарушения устойчивости требуется подбор оптимальной скорости изменения управляющего воздействия µ(t)/dt. Известной оценкой средней скорости изменения регулирующих воздействий в системах с широтно-импульсным шаговым управлением является скважность последовательности импульсов γ. Скважность - это отношение длительности импульса τи к сумме времени импульса и паузы τп,
а интервал времени Δτ между шагами работы ЭР зависит от длительности импульса τи и скважности γ

В заявке предлагается КБ, в котором предусмотрена настройка оптимальной для конкретного объекта длительность импульса τи, а скважность (интервал времени между шагами Δτ) или длительность паузы τп в предлагаемом КБ определяется с использованием интегральной меры оценки отклонения оптимизируемой величины Y(t) на интервале k-го шага
где Y(t) - текущее измеряемое значение регулируемой величины, Yk-1 - результат последнего измерения Y(t) на k-l-м шаге.
В предлагаемом КБ предусмотрена установка предельного значения интеграла (5) Imax. На каждом k-м шаге, при достижении абсолютного значения |Ik| установленного значения Imax в схеме КБ по знаку Ik определяется направление движения к оптимуму для следующего k+l-го шага и затем интеграл обнуляется. Для следующего k+l-го шага в подынтегральное выражение (5) устанавливается результат последнего измерения Y(t) на k-м шаге.
Для установленного значения Imax суммарное время импульса и паузы Δτk=τи+τп=tk-tk-1 будет зависеть от статических и динамических свойств конкретного объекта управления и, соответственно, реакции его на управляющее воздействие ЭР на k-м шаге. Как видно из графиков на фиг.2,а, чувствительность функций (1) при приближении к оптимуму снижается и время Δτ возрастает, что положительно влияет на устойчивость работы ЭР. Кроме этого, интегральная оценка изменения оптимизируемой величины фильтрует на интервале времени Δτ высокочастотные колебания и шумы канала измерения.
Для работы ЭР с конкретным объектом с максимальной скважностью (скорость регулирующего воздействия) в КБ предусмотрена настройка значения Imax.
Предложений по применению шагового способа поиска экстремума в литературе много, но публикаций по схемам для практической реализации алгоритма мало. В патенте RU 02168827 H02J 7/35. [Опубл. 10.06.2001] опубликована схема регулирующего устройства для управления силовыми преобразователями энергии в системах электропитания космических аппаратов с солнечной батареей, содержащая масштабирующий усилитель, являющийся первым измерительным входом устройства, генератор тактовых импульсов, счетчик распределитель, логические элементы ИЛИ и И, триггер, реверсивный счетчик и цифроаналоговый преобразователь. К недостаткам опубликованного в данном патенте экстремального регулятора следует отнести сложность его схемы. Он ориентирован на работу в системе электропитания космических аппаратов и имеет ограниченное применение. Согласно описанию, в нем время шага постоянно и задается генератором тактовых импульсов и не предусмотрена оперативная динамическая настройки длительности шага.
Наиболее близкое решение к предлагаемому в заявке КБ опубликовано в патенте RU 2015522 G05B 13/00. [Опубл. 30.06.94], в котором алгоритм экстремального управления инерционным объектом включает в себя дискретные измерения выходного сигнала объекта управления и по результатам их анализа - периодические дискретные изменения управляющего воздействия. При этом на объект управления последовательно подают первое и второе различные по величине неизменные пробные воздействия и после поочередного вывода объекта на соответствующие указанным воздействиям установившиеся режимы регистрируют определяющие эти режимы значения выходного сигнала, затем определяют среднее из упомянутых значений выходного сигнала и в заданный момент времени вновь подают на объект управления первое пробное воздействие, после чего контролируют текущее значение выходного сигнала, фиксируют момент достижения равенства его с ранее определенным средним и в качестве периода изменений управляющего воздействия выбирают величину, равную или большую разности между зафиксированным и заданным моментами времени, а в процессе вывода объекта управления на соответствующий второму пробному воздействию установившийся режим контролируют монотонность изменения выходного сигнала и при ее нарушении возобновляют осуществление способа, принимая второе пробное воздействие за новое первое.
Для практической реализации этого способа [патент RU 2015522 G05B 13/00. Опубл. 30.06.94] предлагается экстремальный регулятор, состоящий из последовательно соединенных импульсного элемента и исполнительного устройства (интегратора). Импульсный элемент формирует и подает на вход интегратора серию импульсов v(t) в соответствии с законом управления


где t - время; θ - длительность импульсов; Т - период повторения импульсов; ky - зона нечувствительности регулятора.
Недостатком предлагаемого в патенте RU 2015522 G05B 13/00. [Опубл. 30.06.94] экстремального регулятора является то, что, во-первых, он, работая с постоянным периодом повторения импульсов, делает несколько пробных шагов для определения оптимального периода для текущего темпа изменения регулируемой величины. Для инерционного объекта темп изменения может изменяться, и экстремальный регулятор будет постоянно подстраиваться, делая много пробных шагов. Во-вторых, при подстройке периода повторения импульсов в этом экстремальном регуляторе используется сложный математический аппарат вычисления среднего значения линеаризации и решения неравенств и уравнений, что потребует значительных вычислительных ресурсов.
Для устранения указанных недостатков в настоящей заявке предлагается КБ экстремального регулятора, в котором интервал времени Δτ между шагами устанавливается автоматически в зависимости от темпов изменения регулируемой величины, а для устойчивой работы ЭР с конкретным инерционным объектом регулирования в предлагаемом в настоящей заявке КБ предусмотрена настройка длительности импульса и минимального интервала времени шага Δτ (скважности).
Предлагаемый КБ имеет универсальное применение для одноконтурных (см. фиг.1,а) и каскадных (см. фиг.1,б) схем экстремального регулирования. Для этого он имеет два выхода: дискретный выход для работы с ИМ и аналоговый для изменения сигнала коррекции задания стабилизирующему регулятору.
На фиг.3 показана структурная схема предлагаемого в заявке КБ экстремального регулятора.
Состоит КБ из входного сумматора 1 и сумматора в корректирующем канале 10, входного интегратора 2 и интегратора корректирующего сигнала 9, ячейки памяти входного сигнала 3 и ячейки памяти выходного сигнала 7, сигнум-реле 4, релейного элемента с регулируемой зоной нечувствительности 5, умножителя 6, таймера с регулируемой длительностью импульса 8, ключа на входе ячейки памяти входного сигнала Кл1, ключа на выходе входного интегратора Кл2 и ключа на входе ячейки памяти выходного сигнала Кл3.
Положительный вход сумматора 1, второй вход сумматора 10 и контакт 1 ключа Кл1 соединены с входом КБ, который соединен с выходом объекта регулирования или с выходом корректирующего регулятора в каскадной схеме регулирования. Контакт 2 ключа Кл1 соединен с входом ячейки памяти 3. Выход ячейки памяти 3 соединен с отрицательным входом сумматора 1. Выход сумматора 1 соединен с входом интегратора 2. Выход интегратора 2 соединен с входом сигнум-реле 4, входом релейного элемента 5 и с контактом 2 ключа Кл2. Выход сигнум-реле 4 соединен с первым входом умножителя 4. Релейный элемент 5 замыкает ключи Кл1, Кл2 и Кл3. Выход умножителя 4 соединен с входом таймера 8 и с первым контактом ключа Кл3. Первый контакт ключа Кл3 соединен с входом ячейки памяти 7. Выход ячейки памяти 7 соединен со вторым входом умножителя 4. Выход таймера 8 соединен с входом интегратора 9, является дискретным выходом КБ и внешней линией соединяется с входом пускового устройства ИМ. Выход интегратора 9 соединен со вторым входом сумматора 10. Выход сумматора 10 является аналоговым выходом КБ и в каскадной схеме регулирования внешней линией или виртуально соединяется с входом стабилизирующего регулятора.
Перед включением КБ в работу, в режиме «дистанционный» устанавливаются стартовые значения сигналов в ячейках памяти 3 и 7. В ячейке памяти 3 и на выходе интегратора 9 устанавливаются нулевые сигналы y0=0 и ΔYкорр=0. В ячейке памяти 7 устанавливается единица с положительным знаком В0=1. В каскадной схеме регулирования в этом режиме на вход стабилизирующего регулятора подается установленный при пуске схемы уровень сигнала от корректирующего регулятора.
В момент переключения КБ в режим «автоматический» экстремальный регулятор, так как В0=1, делает первый пробный шаг в сторону увеличения регулирующего воздействия +I0. Все последующие шаги являются рабочими и направлены в соответствии с выражением (1) в сторону приближения к экстремуму.
На k-м шаге работы сигнал с выхода объекта регулирования y(t) подается на положительный вход сумматора 1, на первый вход ключа Кл1 и на первый вход сумматора 10. Результат суммирования в сумматоре 1

поступает на вход интегратора 2. В выражении (6) yk-1 - значение регулируемой величины, запомненное в ячейке памяти 3 в момент выполнения экстремальным регулятором k-1 шага.
На интервале времени шага Δτ=tk-tk-1 сигнал на выходе интегратора yu(t) изменяется от нуля в положительную или отрицательную сторону до значения зоны нечувствительности δ релейного элемента 5
Зона нечувствительности δ устанавливается в релейном элементе и является настроечным параметром экстремального регулятора. Она подбирается оптимальной при динамической настройке ЭР на конкретном объекте управления.
В момент времени tk, когда |yu(t)|=δ сигнал на выходе сигнум-реле 4 определится из его уравнения
а сигнал на выходе умножителя из выражения

где Bk-1 - сигнал из ячейки памяти 7, Z - признак цели оптимизации, в соответствии с принципом шагового способа (1), Z=+1 для задачи максимизации, а Z=-1 для минимизации. В этот момент релейный элемент 5 замкнет ключи Кл1, Кл2 и Кл3. Ключи Кл1 и Кл3 откроют входы ячеек памяти 3 и 7. Ключ Кл2 обнулит сигнал на выходе интегратора 2  и релейный элемент снова разомкнет ключи Кл1, Кл2 и Кл3.
и релейный элемент снова разомкнет ключи Кл1, Кл2 и Кл3.
С этого момента начнется следующий k+1 шаг работы регулятора. На этом шаге в ячейке памяти 3 будет содержаться значение сигнала yk, которое было на выходе объекта регулирования в момент времени tk, а в ячейке памяти 7 - значение сигнала на выходе умножителя для того же момента времени Bk.
В соответствии с выражениями (8) и (9) КБ реализует алгоритм формирования последовательности импульсов по следующей логической функции

В начале каждого k-го шага запускается таймер 8. На его выходе появляется и сохраняется на интервале времени τи сигнал положительного или отрицательного знака ±Ik. При этом включается электродвигатель ИМ и начинает интегрировать интегратор 9. Длительность импульса τи устанавливается в таймере 8 и является органом динамической настройки ЭР для работы на конкретном объекте регулирования. Интегратор 9 является встроенным в КБ аналогом ИМ постоянной скорости. Он также имеет орган настройки - скорость интегрирования Sи, которая выбирается при настройке каскадной схемы. Результат интегрирования на интервале τи складывается в сумматоре 10 с сигналом y(t) и в каскадной схеме регулирования изменяет задание стабилизирующему регулятору для достижения цели экстремального регулирования.
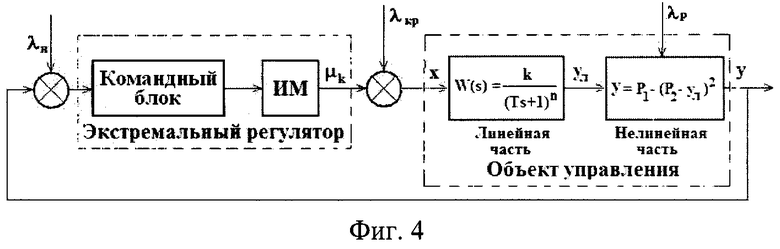
Работа предлагаемого КБ подтверждается результатами численного имитационного моделирования системы экстремального регулирования инерционного объекта. На фиг.4 показана структурная схема моделируемой системы экстремального регулирования. Командный блок ЭР настроен на поиск максимума.
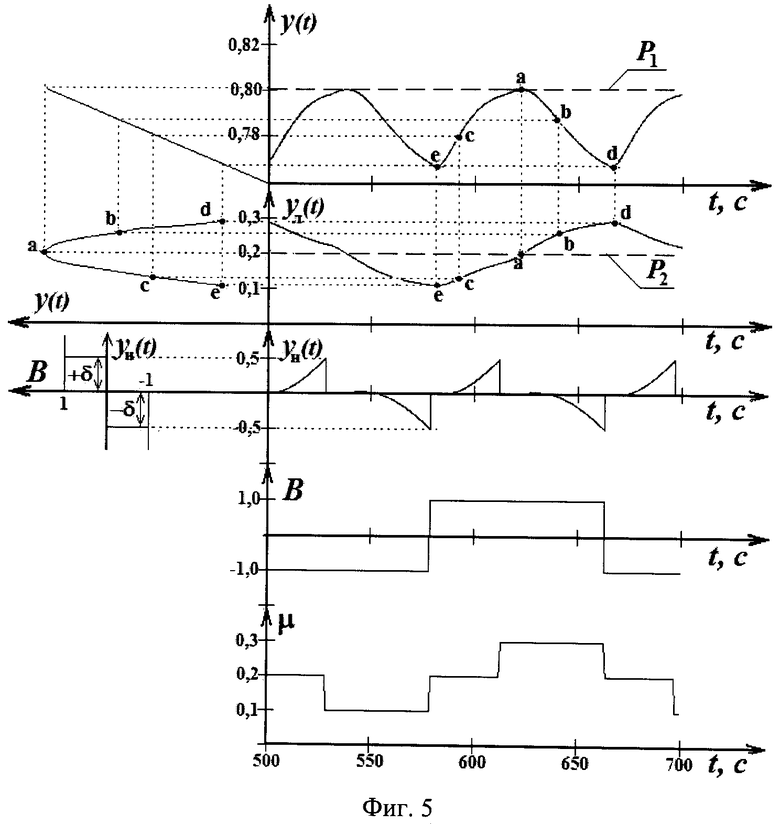
На фиг.5 показаны осциллограммы изменения сигналов в точках схемы КБ полученные при моделировании работы ЭР в стационарном состоянии объекта. Колебания происходят в окрестности экстремума объекта с передаточной функцией линейной части

и параболы для нелинейной части

где k=1; T1=15 с; Т2=10 с; τ=1 с; P1=0,8; Р2=0,2.
Для ЭР при моделировании были установлены следующие параметры:
- зона нечувствительности релейного элемента δ=0,5;
- длительность импульса τи=1,0 с.
Скорость ИМ Sим=0,1% РО/с. (Время полного оборота 1000 с.)
На фиг.5 показаны, графики построенной по точкам а, b, с, d, e моделируемой параболы (8) и статической характеристики релейного элемента с зоной нечувствительности δ=0,5.
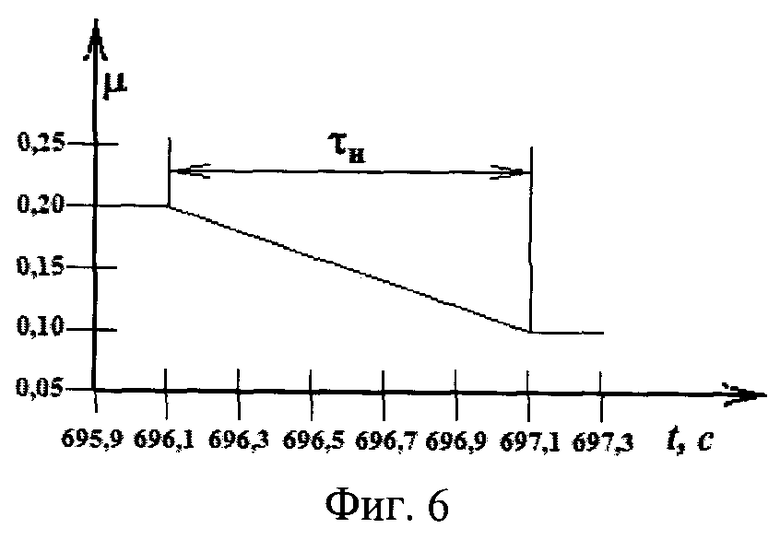
На фиг.6 показан расширенный во времени график работы ИМ для одного шага, из которого видно, что шток регулирующего органа перестановлен на 0,1% за время 1,0 с.
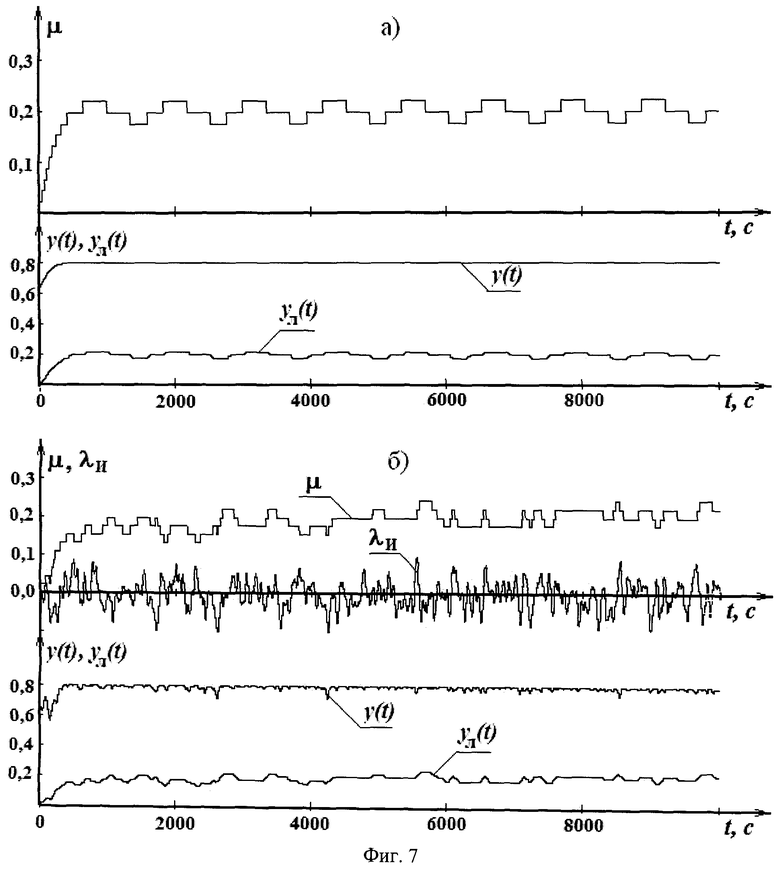
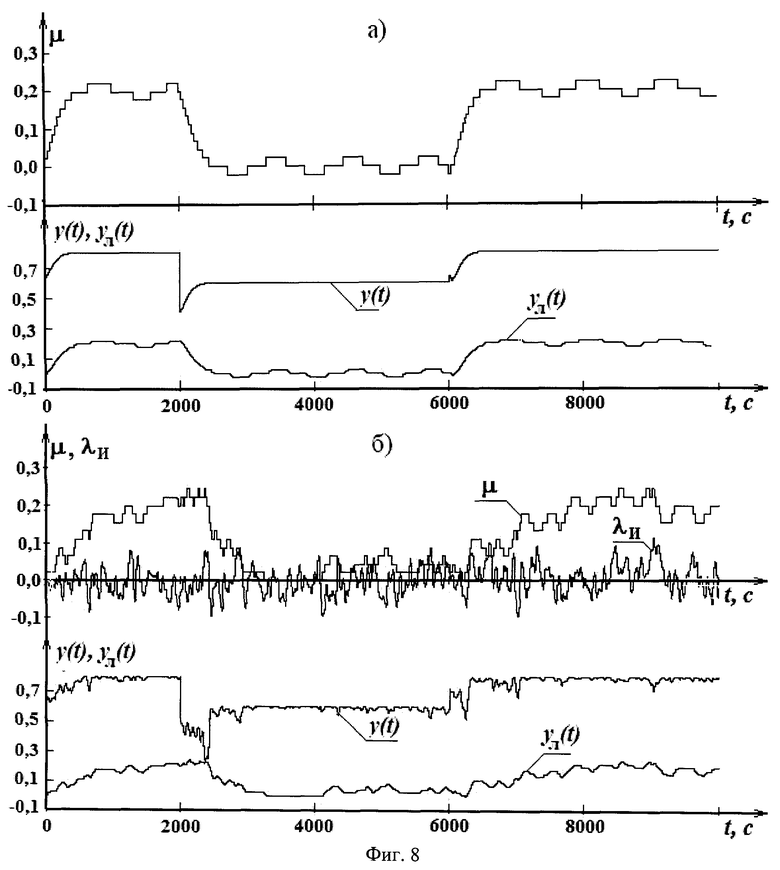
На модели объекта (7) и (8) сделано имитационное тестирование работы экстремального регулятора на интервале времени 10000 с (2,778 часа). Тестирование сделано на стационарном объекте при неизменных параметрах P1 и Р2, при монотонно возрастающих параметрах и при одновременном ступенчатом их изменении. На фиг.7, 8, 9 показаны графики изменения сигналов на выходе объекта управления y, на выходе линейной части объекта yл, на выходе экстремального регулятора µ и случайного сигнала λИ. Для всех трех режимов имитационное моделирование проведено в отсутствие случайных возмущений (см. фиг.7,а, 8,а, 9,а) и при аддитивной подаче случайной центрированной функции на входе экстремального регулятора (ошибки измерения) λИ (см. фиг.7,б, 8,б, 9,б).
| название | год | авторы | номер документа |
|---|---|---|---|
| Система экстремального регулирования | 1981 |
|
SU1056132A1 |
| Нелинейное корректирующее устройство | 1987 |
|
SU1536351A1 |
| Пневматический регулятор с переменной структурой | 1976 |
|
SU640254A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ ПНЕВМАТИЧЕСКИЙ РЕГУЛЯТОР | 1965 |
|
SU174866A1 |
| Адаптивная система регулирования объекта с нестационарной характеристикой,например,дуговой сталеплавильной печи | 1983 |
|
SU1068891A1 |
| Экстремальный регулятор режима обработки на металлорежущих станках | 1980 |
|
SU1015338A1 |
| Нелинейное корректирующее устройство | 1984 |
|
SU1226403A2 |
| Импульсный регулятор | 1983 |
|
SU1117585A1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2011 |
|
RU2462744C1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2369893C1 |

Изобретение относится к автоматизации технологических процессов. Техническим результатом является повышение надежности схем экстремального регулирования. Для этого предложен командный блок шагового экстремального регулятора, который содержит входной сумматор, сумматор в корректирующем канале, входной интегратор, интегратор корректирующего сигнала, ячейку памяти входного сигнала, ячейку памяти выходного сигнала, сигнум-реле, релейный элемент с регулируемой зоной нечувствительности, умножитель, таймер с регулируемой длительностью импульса, ключ на входе ячейки памяти входного сигнала, ключ на выходе входного интегратора и ключ на входе ячейки памяти выходного сигнала, при этом для определения знака отклонения регулируемой величины на интервале k-го шага используется оценка, полученная интегрированием во входном интеграторе вычисляемой во входном сумматоре разности текущей регулируемой величины и ее значения, записанного в ячейке памяти входного сигнала в момент времени окончания k-l-го шага; для вычисления направления (знака) регулирующего воздействия на k-м шаге используются сигнум-реле, преобразующее сигнал на выходе входного интегратора, ячейка памяти выходного сигнала, в которой записан знак регулирующего воздействия на k-l-м шаге, и умножитель сигналов с выходов сигнум-реле, и ячейки памяти выходного сигнала; а для настройки для работы с конкретным объектом управления на оптимальную длительность импульсов и скважность последовательности импульсов используются таймер с регулируемой длительностью импульса и релейный элемент с регулируемой зоной нечувствительности. 2 з.п. ф-лы, 9 ил.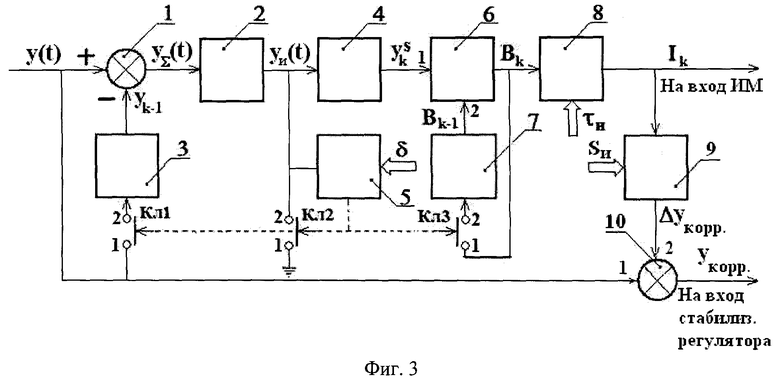
1. Командный блок шагового экстремального регулятора содержит входной сумматор, сумматор в корректирующем канале, входной интегратор, интегратор корректирующего сигнала, ячейку памяти входного сигнала, ячейку памяти выходного сигнала, сигнум-реле, релейный элемент с регулируемой зоной нечувствительности, умножитель, таймер с регулируемой длительностью импульса, ключ на входе ячейки памяти входного сигнала, ключ на выходе входного интегратора и ключ на входе ячейки памяти выходного сигнала, отличающийся тем, что для определения знака отклонения регулируемой величины на интервале k-го шага используется оценка, полученная интегрированием во входном интеграторе вычисляемой во входном сумматоре разности текущей регулируемой величины и ее значения записанного в ячейке памяти входного сигнала в момент времени окончания k-1-го шага; для вычисления направления (знака) регулирующего воздействия на k-м шаге используется сигнум-реле, преобразующее сигнал на выходе входного интегратора, ячейка памяти выходного сигнала, в которой записан знак регулирующего воздействия на k-1-м шаге и умножитель сигналов с выходов сигнум-реле и ячейки памяти выходного сигнала; а для настройки для работы с конкретным объектом управления на оптимальную длительность импульсов и скважность последовательности импульсов используются таймер с регулируемой длительностью импульса и релейный элемент с регулируемой зоной нечувствительности.
2. Командный блок по п.1, отличающийся тем, что может быть использован как самостоятельный функциональный блок при построении одноконтурных схем экстремального регулирования или динамическим звеном в каскадных схемах экстремального регулирования в канале связи выхода корректирующего регулятора с заданием стабилизирующего регулятора.
3. Командный блок по п.1, отличающийся тем, что может быть выполнен в виде отдельного прибора или виртуально в кодах программируемого промышленного контроллера.
| СПОСОБ ДИСКРЕТНОГО ЭКСТРЕМАЛЬНОГО УПРАВЛЕНИЯ ИНЕРЦИОННЫМ ОБЪЕКТОМ | 1991 |
|
RU2015522C1 |
| ЭКСТРЕМАЛЬНЫЙ РЕГУЛЯТОР МОЩНОСТИ СОЛНЕЧНОЙ БАТАРЕИ | 2000 |
|
RU2168827C1 |
| Экстремальный регулятор непрерывного действия | 1973 |
|
SU452806A2 |
| EP 1519253 A2, 30.03.2005. | |||

