рователя команд ТИ-ТС. Второй выход линейного блока соединен через преобразователь частоты в код к пятому входу блока обработки сигналов, выход соединен со входом блока ручного управления, второй выход блока выбора адреса КП подключен ко второму входу блока приоритета выдачи команд, выход которого соединен со вторым входом формирователя команд ТИ-ТС.
Недостатки известного устройства заключаются в сравнительно ограниченных функциональных возможностях, сравнительно узкой области применения, недостаточно рациональном использовании линии связи в сравнительно невысокой достоверности приема информации в отсутствии согласования с вычислительными машинами.
При разработке устройства для объектов нефтедобычи необходимо учитывать такие специфические факторы, как количество и характер расположения объектов, особенности технологического оборудования (режим работы, условия эксплуатации), метод измерения телемеханических параметров, объем информационных потоков и другие.
Современное нефтегазодобывающее предприятие представляет собой крупный промышленный комплекс. При автоматизации и телемеханизации его учитываются основные факторы, которые определяют технические требования к системам телемеханики. Например, к устройствам телемеханики для объектов нефтедобычи могут быть подключены скважины всех видов эксплуатации: фонтанные скважины, скважины с электропогружным насосом, глубиннонасоспые скважины, скважины оборудованные станком-качалкой. Кроме того, к системе могут быть подключены объекты с технологическими установками и агрегатами, сосредоточенными в отдельных помещениях: насосами внутренней перекачки нефти, установками нефтесборных парков, насосами перекачки технической воды, компрессорными станциями.
Основным параметром, характеризующим режим работы скважины и состояние технологического оборудования, является дебит скважины, поэтому телеизмерение дебита нефти, газа и общей жидкости необходимо для оперативного контроля состояния скважины. Дебит нефтяных скважин измеряется с помощью различных ЗПУ (например, Спутник-А, Спутник-Б, Трап, ЗУГ), в которых группируется несколько скважин (в каждой группе от 14 до 24 скважин).
Однако в нефтедобывающих предприятиях, расположенных в районах со сложными геологическими условиями, для скважин необходим контроль буферных и затрубных давлений фонтанных скважин (ТИТ), который производится с помощью датчиков различных типов ( с кодовыми или частотными выходами), теледиамометрирование (ТД) работы глубиннонасосных скважин, телеуправление двухпозиционными объектами (ТУ), оперативный
контроль состояния скважины (при резком снижении дебита, полном прекращении подачи нефти скважиной и др.) и прискважинного оборудования (ТСА) и телесигнализация состояния двухпозиционных объектов (ТСС).
Для нефтедобычи характерна сильная рассредогоченность объектов и установок на площади месторождения.
Число эксплуатационных скважин на нефтепромысле достигает нескольких сотен. Дальность действия системы телемеханики определяется, исходя из максимальных расстояний от места расположения пункта управления (ПУ) до объектов, включенных в систему централизованного контроля и управления. Анализ действующих нефтепромыслов показывает, что в большинстве случаев максимальная протяженность месторождений составляет около 60 км.
20 Сильная рассредоточенность и географическое местоположение объектов требуют использования древовидной структуры линии связи. Как указано выше, специфика объектов, непосредственно связанных с добычей нефти, и 5 характер информационных потоков в системе централизованного управления и контроля нефтепромысловыми установками не позволяют для телемеханизации объектов нефтедобывающих предприятий применять устройство 30 телемеханики общепромышленного назначения.
Целью изобретения является повышение эффективности устройства телемеханики.
Эта цель достигается тем, что в предложен5 ное устройство введены блок памяти ТС-ТК, блок индикации, блок наличия информации и блок контроля достоверности информации, входы которого подключены соответственно ко второму выходу шифратора и третьему вы0 ходу линейного блока. Выход блока контроля достоверности информации соединен со вторыми входами дешифратора, блока памяти ТИ, с первыми входами блока памяти ТС-ТК и блока наличия информации. Второй выход 5 формирователя ТИ-ТК подключен ко второму входу преобразователя частоты в код. Выход формирователя номера КП с интегральным параметром соединен с формирователем признака команд и с третьим входом блока зада0 ния программы измерения, выход которого подключен к третьему входу формирователя команд ТИ-ТС. Третий выход формирователя команд ТИ-ТС соединен со вторым входом блока наличия информации, третий вход ко5 торого п второй вход блока памяти ТС-ТК подключены ко второму выходу шифратора. Выход дешифратора соединен с третьим входом блока памяти ТС-ТК, выходы которого подключены соответственно ко входу блока 0 индикации и к шестому входу блока обработки информации. Второй выход блока исключения объектов соединен с четвертым входом блока наличия информации, выходы которого подключены соответственно к седьмому входу блока обработки информации и к четвертым входам блока выбора адреса КП и формирователя команд ТИ-ТС, пятый вход которого соединен со вторым выходом блока выбора адреса КП.
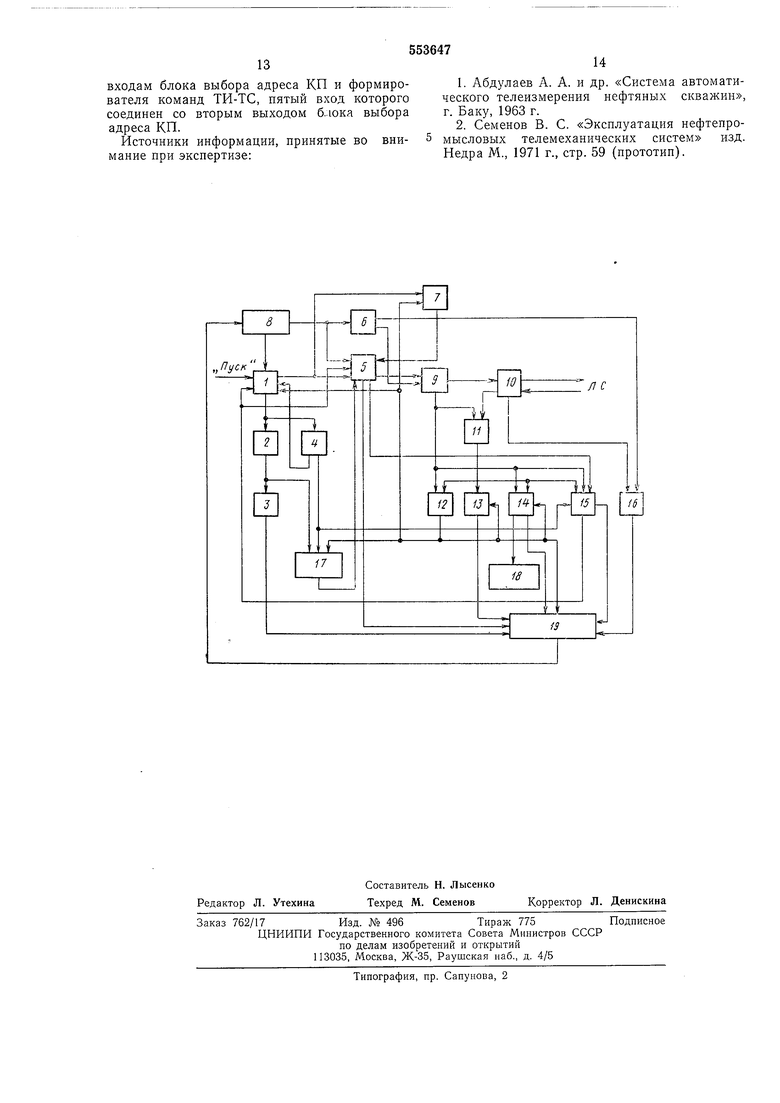
На чертеже приведена структурная схема предложенного устройства телемеханики для рассредоточенных объектов.
Устройство содержит блок выбора адреса КП, формирователь номера КП с итегральным параметром 2, формирователь признака команд 3, блок исключения объектов 4, формирователь команд ТИ-ТС 5, формирователь команд ТУ-ТК 6, блок приоритета выдачи команд 7, блок ручного управления 8, шифратор 9, линейный блок 10, блок контроля достоверности информации И, дешифратор 12, блок памяти ТИ 13, блок памяти ТС-ТК 14, блок наличия информации 15, преобразователь частоты в код 16, блоки задания программы измерения 17, блок индикации 18, блок обработки сигналов 19 (например, вычислительная машина).
Блок выбора адреса КП 1 содержит счетчик КП и направлений (собранный на триггерах) и предназначен для выбора адреса нужного КП (в системе 15 КП), подключенных к 15 направлениям (общее число обслуживаемых системой КП-225).
Формирователь номера КП с интегральным параметром 2, собранный на элементах ИИЛИ, предназначен для определения номера КП, содержащего интегральные значения параметров.
Формирователь признака команд 3, собранный на элементах И-ИЛИ, предназначен для формирования коэффициентов каждого параметра каждого КП, которые при обработке информации выдаются на устройство обработки.
Блок исключения объектов 4, собранный на элементах И-ИЛИ и тумблерах служит для исключения из работы системы любого КП по требованию диспетчера.
Формирователь команд ТИ-ТС 5 формирует команду, при которой осуществляются операции ТИ, ТСА и ТСС.
Формирователь команд ТУ-ТК 6 предназначен для формирования команд ТУ и ТК.
Блок приоритета выдачи команд 7 задает очередность выполнения команд в автоматическом режиме.
Блок ручного управления 8 служит для контроля за работой системы в ручном режиме управления.
Шифратор 9 содержит кварцевый генератор, распределитель тактов (на 22 позиции) и предназначен для щифрации адреса КП, объектов и команд.
Линейный блок 10 предназначен для коммутирования направления, выделения поступающих из линии связи сигналов, устранения влияния помех и передачи информации.
Блок контроля достоверности информации 11 обеспечивает контроль достоверности информации.
Дешифратор 12 служит для дешифрации полученной информации.
Блок памяти ТС-ТК 14 предназначен для приема информации ТСС и ТК (при использовании кодовых датчиков) и выдачи ее на устройство обработки.
Блок памяти ТИ 13 предназначен для приема информации ТИ и выдачи ее на устройство обработки.
Блок наличия информации 15 предназначен для выявления номеров КП, содержащих информацию, и проверки выполнения команд «включ. счетчик (КП подключаются к ЗПУ) и «Откл. счетчик (КП отключаются от ЗПУ) при центральной единой программе.
Преобразователь частоты в код 16 преобразует частоту (при работе частотного датчика) в двоично-десятичный код и выдает его на устройство обработки.
Блок задания программы измерения 17 предназначен для установления индивидуальной программы замера дебита каждой скважины (объекта) в зависимости от величины параметра. Для этой цели запоминается состояние КП, на котором осуществляется измерение интегральных значений параметров, номер скважин этого КП, стоящих на замере, и время замера дебита скважин.
Блок индикации 18 предназначен для воспроизведения состояния двухпозиционных объектов.
Блок обработки сигналов 19 обрабатывает, регистрирует и выдает яа индикацию (ла диспетчерском пульте) необходимую информацию.
Предложенное устройство работает в двух режимах: автоматическом и ручном.
В автоматическом режиме осуществляются
телеизмерение интегральных значений параметров (ТИИ), телесигнализация аварийного
состояния датчика (ТСА) и телесигнализация
состояния двухпозиционных объектов (ТСС).
В ручном режиме выполняются все операции, которые устройство способно осуществить.
Устройство обеспечивает замер дебита нефтяных скважин в зависимости от способа замера и используемых ЗПУ по трем программам;
центральной индивидуальной (в устройствах для каждой скважины устанавливается индивидуальная программа замера дебита),
центральное единой (в системе устанавливается общая программа замера дебита для всех скважин)
и местной (в КП устанавливается общая программа замера для всех скважин).
В последних двух случаях блок задания програм.мы измерения 17 может и не входить в состав системы, а блок приоритета выдачи команд 7 используется только при центральной единой программе.
Для осуществления синхронизации между устройством и обслуживаемыми КП при каждом обращении к КП устройство посылает
синхроимпульс, в отличие от информационного сигнала длительность синхроимпульса выбрана в три раза больше длительности импульса элементарной посылки, которая принята равный 40 мс с целью обеспечения надежной работы устройства на расстоянии до 60 км при кабельных линиях связи.
Рассмотрим действие устройства по функциям, выполняемым им.
Телеизмерение интегральных значений параметров (ТИИ) в автоматическом режиме.
Предположим, что дебит нефтяных скважин измеряется по центральной индивидуальной программе.
После поступления сигнала «пуск блок 1 формирует номер КП (исходное состояние блока 1 соответствует номеру первого КП первого направления), который поступает на вход формцрователя 2 и блока 4. Если выбранный КП не исключен из работы системы, то с выхода блока 4 на вход блока 17 поступает сигнал. Кроме того, если выбранный КП имеет информацию об интегральных значениях параметров, то на блок 17 поступает также сигнал с выхода формирователя 2. После получения этих сигналов блок 17 формирует признак команды «Вкл. счетчик, по которому должно осуществляться подключение КП к ЗПУ. С выхода блока 17 сигнал иризнака команды поступает на один из входов формирователя 5, на дрзгой вход которого уже поступил с выхода блока 1 сигнал о выборе номера КП. После этого формирователь 5 разрешает шифрацию команды «Вкл. счетчик, затем шифратор 9, получивший разрешение этой команды, шифрует коды адреса выбранного КП и команды (с помошью генератора и распределителя), которые через линейный блок 10 посылаются в линию связи. Ответ о выполнении этой команды в виде квитанции поступает через линейный блок 10 на блок контроля достоверности информации И, откуда после проверки поступает на дешифратор 12. После этого с выхода дешифратора 12 сигнал поступает на блок 17 для формирования очередной команды данного КП и на блок I для формирования очередного номера КП данного направления (второго КП первого направления).
Аналогично описанному выше посылается команда «Вкл. счетчик на все КП. При исключении какого-либо КП с выхода блока 4 на вход блока 1 поступает сигнал, который формирует очередной номер КП. Через определенное время (для Спутника-14 Трапа - 20 мин.) блок 17 формирует признак команды «Откл. счетчик для тех КП, время замера которых истекло. После получения сигнала признака команды «Откл. счетчик от блока 17 формирователь 5 через шифратор 8 и линейный блок 10 формирует команду «Откл. счетчик. Ответ о выполнении этой команды через блоки 10, 11 и 12 поступает на вход блока 17 для формирования очередной команды данного КП и на блок выбора адреса КП
I для формирования очередного номера КП. Аналогично посылается команда «Откл. счетчик на другие КП, время замера которых истекло.
В зависимости от программы замера скважин состояния различных КП различны (время замера скважин Спутником- 1 ч., 2 ч., 4ч., 8 ч.. Трапом - 20 мин, 40 мин, 80 мин, 160 мин), поэтому по истечении некоторого
времени от исходного состояния, устройство в зависимости от состояния КП посылает различные команды. Эти команды посылаются в одном цикле, причем опрос в этом цикле не производится. Например, если КП не подключен к ЗПУ, то система посылает команду «Вкл. счетчик, если подключеи - команду «Откл. счетчик. Если в КП имеется информация, то в этом цикле этот КП не опрашивается. В конце цикла блок 17 разрешает опрос тех КП, на которых имеется информация.
Опрос производится следующим образом.
Для выяснения, в каких КП, подключенных к
одному направлению, имеется информация,
формирователь 5 через шифратор 9 и линейный блок 10 формирует служебный сигнал «Разрешение на все КП этого направления (например, на все КП первого направления). После этого КП данного направления, содержащие информацию, выдают свои номера, которые через линейный блок 10 и блок контроля достоверности информации 11 поступают на вход блока наличия информации 15. Последний после получения номера КП проверяет наличие на них информации. При наличии
информации блок 15 посылает сигнал на формирователь 5, который через шифратор 9 и линейный блок 10 посылает адрес этого КП и команду ТИ-ТС для опроса информации. Информация этого КП в сопровождении функционального адреса (предположим, что имеется только информация ТИИ), через блоки 10 и 11 поступает на соответствующие блоки 2 и 13. После дешифрации функционального адреса дешифратор 12 разрешает блоку 13 выдачу информации на блок обработки сигналов 19, на который поступает от формирователя признака команд 3 коэффициент этого КП. В таком порядке блок 15 опрашивает все
КП первого направления на которых имеется информация, после чего выдает сигнал на блок 1, где формируется но.иер второго направления.
КП всех направлений опрашиваются аналогично.
При работе устройство по центральной ециной программе, в связи с тем, что время замера всех КП одинаково, в одном цикле все КП подключаются к ПУ, а в другом отключаются от него. При этом очередность посылки команд осуществляется с помощью блока приоритета выдачи команд 7. В этот момент команда «Вкл. счетчик посылается на все КП одного направления. После подключения
всех КП этого направления в ЗПУ система получает квитанцию об их подключении. Ответ (квитанция) поступает на блок 15, который в случае правильного вьтолнения команды выдает на блок 1 сигнал для посылки на очередное направление. В конце цикла (после подключения всех КП к ЗПУ) дешифратор 12 формирует сигнал, который поступает на блок 7, где подготавливает выдачу команды «Откл. счетчик. Эта команда выдается по истечении времени замера. Команда выполняется аналогично выполнению команде «Вкл. счетчик. После завершения цикла выполнения команды «Откл. счетчик система опрашивает информацию, как описано выше. При местной программе программа замера установлена в самом КП, поэтому подключение всех КП к ЗПУ и отключение от нее осушествляются в КП, а опрос информации производится, как описано выше. Опрос состояния объектов производится следуюш,им образом. При опросе информации КП (который осуществляется по команде ТИИ-ТС) и наличии сигнала об аварийном состоянии датчика (ТСА), изменении состояния двухпозиционных объектов (ТСС) и о готовности информации ТИИ, КП выдает с приоритетом всю информацию (ТСА, ТСС, ТЫИ) в сопровождении функционального адреса. Рассмотрим случай, когда имеется только информация ТСА и ТСС (ТИИ уже рассмотрено). После получения команды ТИИ-ТС КП выдает последовательно информацию ТСА и ТСС. Информация ТСА поступает через блоки 10 и 11 на дешифратор 12, который выдает эту информацию на блок обработки сигналов 19 для регистрации. Информация ТСС через блоки 10 и 11 поступает на дешифратор 12 и блок памяти ТСС-ТК 14 (функциональный адрес дешифруется в дешифраторе 12, а информация о состоянии двухпозиционных объектов запоминается в блоке 14). После дешифрации функционального адреса дешифратор 12 разрешает блоку 14 выдачу информации о состоянии объекта на блок 18 для воспроизведения и на блок обработки сигналов 19 для регистрации. Телеуправление осушествляется в ручном режиме. Оператор на блоке ручного управления 8 набирает номер КП, на котором необходимо произвести телеуправление, и номера объектов и нажимает одну из кнопок «ТУ - вкл. или «Ту - ОТКЛ.. При этом все сигналы с выхода блока 8 поступают на вход формирователя 6, который срабатывает и через шифратор 9 и линейный блок 10 в линию связи посылает коды номера нужного КП, объекта и команды (функционального адреса) «Ту- вкл.. или «Ту - ОТКЛ.. Ответ об исполнении этой команды через блоки 10 и 11 поступает на дешифратор 12, дешифрируется и подается на блок обработки сигналов 19 для регистрации. Телеизмерение текущих значеий параметров ТИТ (телеконроль) осуществляется только в ручном ежиме. При этом набирают номер П и объектов и нал имают одну из кнопок ИТ 1 или ТИТ 2. Формирователь 6 через блоки 9 и 10 поылает коды -номера нужиого КП, объекте команды ТИТ 1 или ТИТ 2 в линию связи. ответ на эту команду с КП поступает инормация, зависящая от используемого датика, который может быть частотным и коовым. В частотном виде информация ТИТ через лок 10 поступает на преобразователь 16, где реобразуется в код и выдается на устройство бработки. При получении информации ТИТ кодовой форме эта информация через блоки 10 и И поступает на блок 14, который выдает е на блок обработки сигналов 19. В обоих случаях для обработки информации с выхода формирователя 3 на блок обработки сигналов 19 поступают значения коэффициентов. Устройство обеспечивает работу 225 КП, . выполненных в нескольких модификациях, на каждом из которых могут осуществляться телеизмерение интегральных значений параметров (ТИИ) - до Г6; телеизмерение текущих значений параметров (ТИТ) или телединамометрирования (ТД)-до 16; телеуправление двухпозиционными объектами (ТУ) -до 8; телесигнализация аварийного состояния датчика (ТСА) - до 8; телесигнализация состояния двухпозиционных объектов (ТСС) - до 8; - двусторонняя телефонная связь (ТЛФ). Кроме того, устройство в зависимости от измеряемого параметра производит обработку, регистрацию и индикацию информации. Таким образом, функциональные возможности устройства расширены ио сравнению с известными устройствами. При этом объем аппаратуры увеличивается незначительно, благодаря тому, что получение информации от КП и ее печать осуществляются одновременно, при опросе информации телеизмерения использована одна память независимо от числа параметров. При этом осуществляется передача команд ТУ и ТИТ с помощью одного блока, в то время как в известном устройстве для передачи каждой из этих команд использованы отдельные узлы, а прием информации ТСС и ТИТ осуществляется одним узлом памяти. Предложенное устройство может быть применено на различных объектах нефтедобывающих предприятий, что обусловлено увеличением числа измеряемых параметров ТИИ и выполнением функции ТСС, дающими возможность применять систему на объектах поддержания пластового давления (ППД), электроснабжения и др. схемным решением и принципами передачи информации, позволяющими исиользовать специально приложенные или выделенные (свободная пара проводов в телефонном канале) кабельные линии связи; одновременной работой с любыми ЗПУ (Спутник, Трап, ЗУГ) при измерении интегральных значений и работа с частотными (трех диапазонов: 2-3, кГц, 2-4 кГц, 4-8 кГц) и кодовыми датчиками при измерении текущих значений (давления), установлением определенного коэффициента для параметра любого КП при телеизмерении интегральных значений (ТИИ). - использованием линейного узла как частотного (код элемента заполняется частотой), так и видеоимпульсного (с токовой посылкой) в зависимости от уровня помех в линии связи, затухания сигнала, требований к надежности передачи сигнала и категории объектов. Устройство позволяет рационально использовать линии связи. С этой целью обнаружение наличия информации в группе КП, подключенных к одному направлению (фидеру), и получение от них информации осуществляется соответственно по служебному сигналу и общей команде. Таким образом, при единой центральной программе подключения всех КП одного направления к ЗПУ и отключение от нее осуществляется по одной команде, так что при этом занятость линии связи уменьшается в зависимости от числа КП на одном направлении. В рассматриваемом устройстве число КП па одном фидере равно 15, следовательно, занятость линии связи уменьшается в 15 раз. С целью повышения достоверности передачи информации используются методы защиты во времени (длительности), по паритету (нечетности) и поразрядное сравнение путем повторения информации, тогда как в известном устройстве информация защищается только во времени и по паритету. Устройство построено по принципу, позволяющему легко подключить его к вычислительной машине. Благодаря используемому принципу построения устройства и реализации отдельных узлов (блок задания программы замера, блок воспроизведения телесигнализации и др). в предлагаемом устройстве, по сравнению с известным значительно сокращает число элементов и время обнаружения отказа аппаратуры, следовательно, повышена надежность устройства. Формула изобретения Устройство телемеханики для рассредоточенных объектов, содержащее блок выбора адреса контролируемых пунктов (КП), первый вход которого соединен с первым выходом блока ручного управления, второй вход - с первым выходом блока исключения объектов, первый выход блока выбора адреса КП соединен со входами формирователя номера КП С Интегральньш параметром и блока 5 10 5 20 25 30 35 40 45 50 55 60 65 исключения объектов, второй выход которого подключен к первому входу блока задания программы измерения, выход формирователя признака команд соединен с первым входом блока обработки сигналов, второй выход блока ручного управления подключен ко входу формирователя команд телеуправления и телеконтроля (ТУ-ТК) и к первому входу формирователя команд телеизмерения и телесигнализации (ТИ-ТС), первые выходы которых соединены со входами щифратора, первый выход шифратора через линейный блок подключен к линии связи, второй выход - к первому входу дешифратора, выход которого подключей ко второму входу блока задания программы измерения, к первому входу блока приоритета выдачи команд, к третьему входу блока выбора адреса КП, к первому входу блока памяти ТИ, ко второму входу блока обработки сигналов, выход блока памяти ТИ соединен с третьим входом блока обработки сигналов, четвертый вход которого подключен ко второму входу формирователя команд (ТИТС, второй выход линейного блока соединен через преобразователь частоты в код к пятому входу блока обработки сигналов, выход которого соединен со входом блока ручного управления, второй выход блока выбора адреса КП подключен ко второму входу блока приоритета выдачи команд, выход которого соединен со вторым входом формирователя команд ТИ-ТС, отличающийся тем, что, с целью повыщения эффективности устройства телемеханики, в него введены блок памяти телесигнализации-телеконтроля (ТС-ТК), блок индикации, блок наличия информации и блок контроля достоверности информации, входы которого подключены соответственно ко второму выходу щифратора и третьему входу линейного блока; выход блока контроля достоверности информации соединен со вторыми входами дешифратора, блока памяти ТИ, с первыми входами блока памяти ТС-ТК, и блока наличия информации; второй выход формирователя команд ТУ-ТК подключен ко второму входу преобразователя частоты в код; выход формирователя номера КП с интегральным параметром соединен с формирователем признака команд и с третьим входом блока задания программы измерения, выход которого подключен к третьему входу формирователя команд ТИ-ТС, третий выход формирователя команд ТИ-ТС соединен со вторым входом блока наличия информации, третий вход которого и второй вход блока памяти ТС-ТК подключены ко второму выходу щифратора; выход дешифратора соединен с третьим входом блока памяти ТС-ТК, выходы которого подключены соответственно ко входу блока индикации и к шестому входу блока обработки информации; второй выход блока исключения объектов соединен с четвертым входом блока наличия информации, выходы которого подключены соответственно к седьмому входу блока обработки информации и к четвертым входам блока выбора адреса КП и формирователя команд ТИ-ТС, пятый вход которого соединен со вторым выходом блока выбора адреса КП. Источники информации, принятые во внимание при экспертизе: 1.Абдулаев А. А. и др. «Система автоматического телеизмерения нефтяных скважин, г. Баку, 1963 г. 2.Семенов В. С. «Эксплуатация нефтепромысловых телемеханических систем изд. Недра М., 1971 г., стр. 59 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Система телемеханики для управления рассредоточенными объектами | 1977 |
|
SU743004A1 |
| Система телемеханики для рассредоточенных объектов | 1976 |
|
SU563685A1 |
| Устройство для сбора и передачииНфОРМАции | 1977 |
|
SU678974A1 |
| Система телемеханики | 1984 |
|
SU1257686A1 |
| Устройство для передачи и приема информации | 1982 |
|
SU1098019A1 |
| Устройство для приема и регистрации телесигналов | 1978 |
|
SU698031A1 |
| Устройство для передачи и приема информации о состоянии объектов | 1978 |
|
SU765856A1 |
| Система телемеханики | 1990 |
|
SU1711216A1 |
| Устройство контролируемого пункта | 1983 |
|
SU1211784A1 |
| УСТРОЙСТВО ТЕЛЕИЗМЕРЕНИЯ ДЛЯ РАССРЕДОТОЧЕННЫ | 1973 |
|
SU386423A1 |
