1
Изобретение относится к области автоматического управления и аналоговой вычислительной техники.
Известны дифференциаторы с адаптацией к некоторым измеряющимся параметрам помехи, содержащие интеграторы, сумматоры и блоки сравнения.
Однако эти устройства не обеспечивают высокого качества многократного дифференцирования и адаптации во всем законном диапазоне изменения параметров помехи. Кроме того,они не являются адаптивными по отношению к меняющимся параметрам полезного сигнала.
Известно дифференцирующее устройство с переменной структурой, содержащее первое инерционное звено, выход которого подключен к основному выходу устройства, а вход через последовательно включенные первый интегратор, подсоединенный своим выходом к первому дополнительному вы-ходу устройства, первый сумматор и второй интегратор - ко второму дополнительному выходу устройства и к первому входу блока сравнения, второй вход которого соединен
с входом устройства, и второе инерционное звено, пoдcoeдинeIп oe входом к другому входу первого сумматора.
Это устройство не обеспечивает подстроки к меняющимся парамет)ам полезного сигнала.
Целью изобрет-ения является повьппение точности устройства и работе.
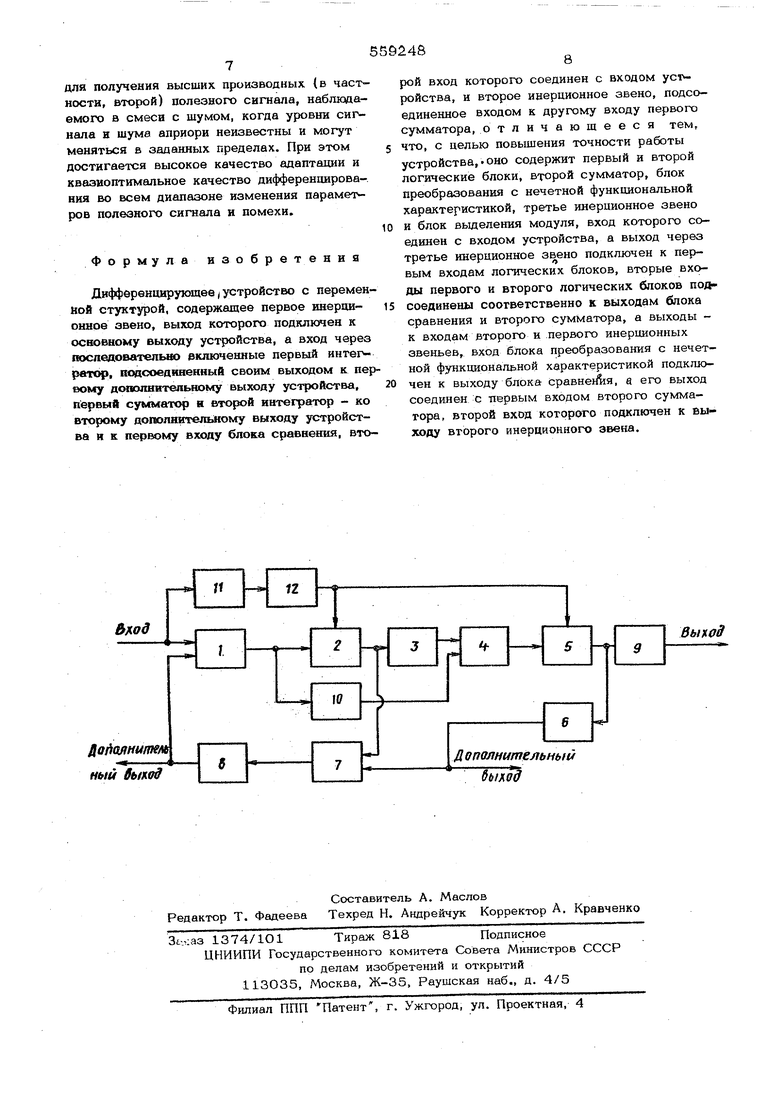
Это достигается тем, что ycTpoficTLo дополнительно содержит первый и второй логические блоки, второй сумматор, §лок преобразования с нечетной функщганальной характеристикой, третье нперпионное звено и блок выделения модуля, вход которого соединен с входом устройства, а выход через третье инерциопное ооено подключен к первым входам поги еских блоков, вторые входы первого и второго логических блоков подсоединены соответственно к выходам блока сравнения и второгхэ cyK -ifiTOpa, а выходы - к входам второго и первого инерционных звеньев, вход блока преобразования с нечетной функциональной характеристикой подключен к выходу блока сравнения, а его рзыход соединен с первым входом второго сумматора, второй вход которого подключен к выходу второго инерционного звена, Такое устройство характеризуется повышенной точностью дифференцирования. На чертеже приведена схема дифференпирующего устройства с переменной структурой. Устройство состоит иэ последовательно сое диненных блока сравнения 1, один вход которого подключен к входу устройства, логического блока 2, инерционного звена 3,-сум матора 4, логического блока 5, интегратора 6,сумматора 7, интегратора 8. Выход интегратора 8 подключен ко второму входу блока сравнения 1. Выход логического блока 2 соединен со вторым входом сумматора 7,а выход логического блока 5 подключен к входу инерционного звена 9, выход которо го является основным выходом устройства. Два дополнительных выхода устройства связамы с выходами интеграторов бив. &ыход блока сравнения 1 через блок 1О преобразования с нечетной функциональной характеристикой связан со вторым входом сум матора 4. Вход устройства через последова тельно соединенные блок выделения модуля 11 и инерционное звено 12 связан с соответст ующими входами логических блоков 2 к 5. Устройство работает следующим образом. .Входной сигнал устройства, предстаёляюший собой аддитивную смесь полеаноговиакйчастот ного сигнала, производные которого необходимо получить, и высокочасготного шума, поступает новременно на блок сравнения 1 и блок выде ления модуля 11. Величина сигнала на выходе инерционного звена 12 с передаточной функцией W( f - 4Т . связанного своим входом с выходом блока вьаделения модуля 11, пропорциональна дисперсии входного сиг нала и при соответствующем выборе величины % (например, из условия ,.Т «-J , где ju,p,- граничная частота сплава полезного сигнала) величина сигнала на выходе инерционного звена 12 определяется, в ос- йовном, величиной дисперсии полезного сигнала 6 ., т.е. уровнем полезного сигнала С С 1гнал U I являющийся выходным сигналом инерционного звена 12, поступает на соответствующие входы логических блоков 2 и 5 со следующей логикой работы: (+и, S, ..s,o. Где ,(54)- выходной сигнал ii-ro логического блока ( tf -ячейки); - сигнал, подаваемый на второй }зход, fi - ячейки; iH,2, Сигнал 5 является выходным сигналом блока сравнения 1, а сигнал 2 вьгходным сигналом сумматора 4. На первый вход сумматора 4 поступает отфильтрованный инерционным звеном 3 с перепаточной (1 ункцней W2( сигиал У(5), а на второй - сигнал S,, пропущенный через бпок 10 преобразования с нечетной функциональной характеристикой. Сигнал Уд ( 52)поступает одновременно на вход инерционного Лена 9, выход которого является выходом устройства, и через последовательно соединенные интегратор б, сумматор 7 и интегратор 8 - на второй вход блока сравнения 1. На второй вход сумматора 7 поступает сигнал ) выходной сигнал логического блока 2. В отсутствии щумов в Дифференциаторе возникает скользящий режим. В скользящем режиме сигнал 5 близок к нулю и соответственно близки к нулю выходной сигнал блока преобразования 10 и сигнал VjfSz) Блок вьщеления модуля 11 и инерционное звено 12 обеспечивают существование скользящего режима в рассматриваемом случае так, что полоса пропускания дифференциатора не зависит от амплитуды входных воздействий. Таким образом, в отсутствии шумов устройство является линейным. Последовательно включенные интегратор 6 и 8 отслеживают фактически с ошибкой S , сколь угодно близкой к нулю, входной счгнап и с выходов интеграторов 6 и S снимаются соответственно сигналы первой производной и входного сигнала. Инерционные звенья 3 и 9 служат для выделения непрерывных сигналов из разрывных сигналов 1 - элементов. При этом на выходе инерционного звена 9 с передаточной функцией MWj(p) J. - получается сигнал второй производной. Точность дифференцирования, зависит от выбора постоянных времени инерционных звеньев Т и Tj и от неидеальностей Ч - элементов При малых неидеальностях вначения Tj и Т, можно выбрать достаточно малыми так, что в рассматриваемом случае осуществляется (в пределе) точное многократное (в данном случае двукратное) дифференцирование. Под действием помех скользящий режим прекращается, возникает режим переключений и .начинают проявляться нелинейные свойства устройства. В атом случае сигнал S уже не близок к нулю и его дисперсия (У определяется дисперсией высокочастотной помехи G ftf . Эквивалентные Koa44 nuHенты передачи Ч - элементов К и К 2 соответственно определяются из выражения КГ 16которое с учетом равенствЪ . мож но переписать в виде к, с,ъ. где С,,Ь некоторые постоянные чис2ла;пол дисперсия полезного сигнал С y ieTOM вышесказанного эквивалентная передаточная функция дифференциатора может быть представлена в виде Wg.(P) -7-, Х)-- п (). Среднеквадратичная ошибка двукратного дифференцирования Ё определяется из вы ражения 00г . . где Wg,(p)- передаточная функция дифференциатора;Wp(P) передаточная функция оптимального дифференциатора; 5(0,R,UJ/- спектральная плотность входного сигнала, зависящая от уровня полезного сигнала Q и уровня помехи R . Для того чтобы во всем диапазоне изме нения параметров Q и Т : РАЛ„Н Q QMAI мин мАкс« среанеквадратичнаа ошибка 2 была минимальной для любых дробно-ра циональных функций, необходимо, чтобы автоматически обеспечивались соответствующие зависимости величин;. эквивалентных коэффициентов К и К j передаточной функции дифференциатора от значений параметро Q и R . Для получения таких зависимостей на вход логического блока 5 ( Vj ячейки) дополнительно подают (через сумматор 4) выходной сигнал блока преобразования 10. Этот сигнал дополнительно л неаризует (в шумах) логический блок 5. В зависимости от вида функции Sjj(Q,R,it)) выбирается соответствующая функциональная характеристика блока преобразования 1О. Для обеспечения квазиоптимального качества дифференцирования и адаптатши в качестве блока преобразования с нечетной функциональной характеристикой использован блок с нечетной нелинейной степенной функипонош ной характеристикой вида , тг/п , . .|5 /6ig-T 5,, где V - выходной сигнал блока преобразования -1.О; Tn,ti - целые числа; V . Дисперсия сигнала 5 определяется, как было отмечено выше, дисперсией высокочастотной помехи |я I а дисперсия сигнала 5 - входного сигнала логического блока 5 определяется дисперсией сигнала V, Таким образом, выражения для К и К - прини,мают вид -С - n« Tim где С, С2 - постоянные; гп п - целые числа, зависящие от wj I и Ti,. Величины гп и тт (а следовательио, тп и П ) выбиршотся, исходя из условий минимума для данного вида 9 (, ш). Передаточная функция дифференциатора для получения второй производной может быть теперь представлена в виде g-( Q-4p(T«...)/,.ptT,,,«,p. Из ЭТОГО выражения следует, что с ростом уровня щума R или уменьшением уровня поte3Horo сигнала Q растут постоянные времени знаменателя передаточной функция, обеспечивая подавление помех. При И О осуществляется точное двукратное дифференцирование при любом значении Q . С ростом Q (при фиксированном Т ) постоянные времени уменьшаются и точность дифференпи ювания растет. Таким образом осуществляется адаптация к меняющимся параметрам Q и R . При этом интегральная б цибка дифференцирования «АКС 1 5 1 (q,R)dRdq казывается минимальной , и дифференциатор существляет квазиоптимальное дифференциование во всем диапазоне изменения параетров- Q и R . Существенно, что при исользовании линейного блока преобразования е удается добиться высокого качества адапации и дифференцирования во всем диапазое изменения Q и R и обеспечить минимум нтегральной ошибки j Дифференцирующее устройство с переменой структурой целесообразно использовать для получения высших производных {в частности, второй) полезного сигнала, наблюдаемого в смеси с шумом, когда уровни сигнала и шума априори неизвестны и могут меняться в заданных пределах. При этом достигается высокое качество адаптации и квазиоптимальное качество дифференцирования во всем диапазоне изменения парамет ров полезного сигнала и помехи. Формула изобретения Дифференцирующее j устройство с перемен ной стуктурой, содержащее первое инерционное звено, выход которого подключен к освовному выходу устройства, а вход через последователыю включенные первый ингег ратор, поасоединенный своим выходом к пер вому дополнительному выходу устройства, первый сумматор и второй интегратор - ко второму дополнительному выходу устройства и к первому входу блока сравнения, второй вход которого соединен с входом устройства, и второе инерционное звено, подсоединенное входом к другому входу первого сумматора, отличающееся тем, что, с целью повышения точности работы устройства, оно содержит первый и второй логические блоки, второй сумматор, блок преобразования с нечетной функциональной характеристикой, третье инерционное звено и блок вьщеления модуля, вход которого соединен с входом устройства, а выход через третье инерционное звено подключен к первым входам логических блоков, вторые входы первого и вгорого логических блоков подсоединены соответственно к выходам блока сравнения и второго сумматора, а выходы к входам второго и первого инерционных звеньев, вход блока преобразования с нечетной функциональной характеристикой подключен к выходу блока СравнеАя, а его выход соединен с первым входом второго суммагора, второй вход которого подключен к выходу второго инерционного эвена.
| название | год | авторы | номер документа |
|---|---|---|---|
| Дифференцирующее устройство с переменной структурой | 1974 |
|
SU461421A1 |
| ПОМЕХОУСТОЙЧИВЫЙ САМОНАСТРАИВАЮЩИЙСЯ ИЗМЕРИТЕЛЬ ТЕМПЕРАТУРЫ ГАЗА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2015 |
|
RU2601712C2 |
| Адаптивный фильтр | 1988 |
|
SU1522382A1 |
| Устройство для аварийного управления активной мощностью электростанции | 1980 |
|
SU953691A2 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| Устройство автоматического управления процессом обогащения | 1979 |
|
SU971473A1 |
| Аналоговое устройство для определения частной производной | 1982 |
|
SU1053065A1 |
| Дифференцирующее устройство второго порядка | 1974 |
|
SU491959A1 |
| Устройство для управления статическим тиристорным компенсатором | 1985 |
|
SU1309175A1 |
| Устройство для измерения параметров инерционных звеньев | 1990 |
|
SU1783478A1 |
HofiQflHume ныи 6ым9 Вылод
