ВИЯХ воздействия KoHTponnpyeNiMx: и неконтролируемых возмущений значительной интенсивности. Система содержит разомкнутый и замкнутый контуры регулирования, блок самонастройки разомкнутого контура и цепи компенсации неконтролируемых возмущений. Разомкнутый контур, включающий блоки 8, 10, 3, 6, 7, предназначен для компенсации контролируемых возмущений.. Блок самонастройки 9 повышает качество работы разомкнутого контура в условиях нестационарности статической характеристики объема. Компенсатор 11 служит для
1
Изобретение относится к с амона- страиваюш мся системам автоматического управления и может быть использовано для управления объектами в химической и других отраслях промышленности.
Цель изобретения - повышение точности работы самонастраивающейся системы в условиях воздействия неконтролируемых возмущений значительной интенсивности.
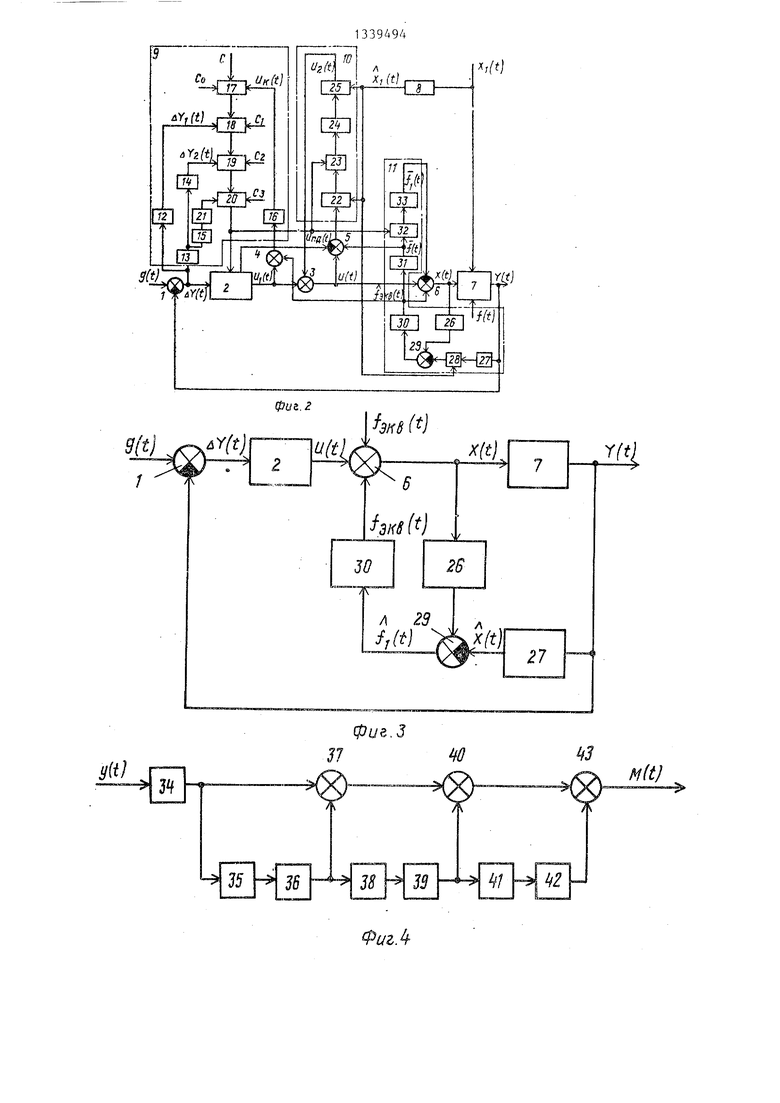
На фиг, 1 представлена блок-схема самонастраивающейся системы комбинированного регулирования;на фиг.2 - структурная.схема системы; на фиг.З основные цепи компенсатора снижаю- ш;ие чувствительность системы к неконтролируемым возмущениям; на фиг. 4-6 - блок-схема обратной модели объекта; на фиг. 7 - блок-схема логических блоков системы; на фиг.8 блок-схема операции интегрирования на скользящем интервале; на фиг.9 - принципиальная схема пневматического пи-регулятора; на фиг. 10 - электрическая схема ПИД-регулятора типаРБА
Система (фиг. 1 и 2) включает измеритель 1 рассогласования, регулятор 2, сумматоры 3-6, 7 управления, датчик 8 внешнего возмущения, блок 9 самонастройки, корректирующий филътр 10, компенсатор 11, блок 12 вьщеления модуля, блок 13 дифференцирования, блок 14 выделения модуля, блок 15 дифференцирования,
339494
расчета и компенсации эквивалентного неконтролируемого возмущения,приведенного к входу объекта по каналу управления. Компенсатор 11 повышает точность системы регулирования, т.к. снижает чувствительность объекта к неконтролируемым возмущениям. Замкнутый контур устраняет влияние на объект всех остальных возмущений. Система включает измеритель рассогласования 1, регулятор 2, сумматоры 3, 4, 5 и 6, объект управления 7, датчик внешнего возмущения 8, блок самонастройки 9, корректирующий фильтр 10, компенсатор 11. Ю ил.
блок 16 выделения модуля, логические блоки 17-20, блок 21 вьщеления модуля 21, блок 22 деления, управляемый ключ 23, блок 24 памяти, блок 25 умножения, блок 26 задержки, блок 27 обратной модели объекта, блок 28 умножения, сумматор 29, блок 30 коррекции, блок 31 интегрирования на скользящем интервале, управляемый ключ
32, блок 33 памяти.
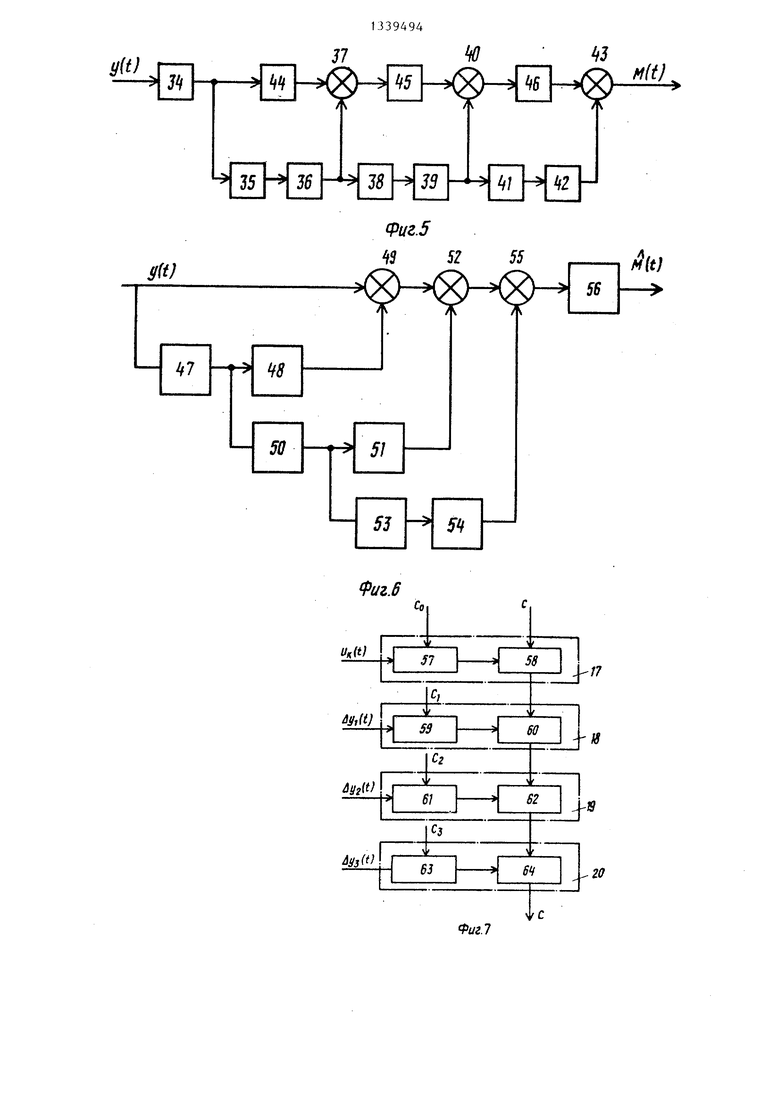
Схемы обратной модели объекта (фиг. 4-6) включают пропорциональные звенья 34.и 35, инерционно-дифференцирующее звено 36,сумматор 37
пропорциональное звено 38, инерционно-дифференцирующее звено 39, сумматор 40, пропорциональное звено 41, инерционно-дифференцирующее звено 42, сумматор 43, инерционные звенья
44-46, блок 47 дифференцирования, пропорциональное звено 48, сумматор 49, блок 50 дифференцирования, пропорциональное звено 51, сумматор 52, блок 53 дифференцирования, пропорциональное звено 54, сумматор 55, пропорциональное звено 56.
Блок-схема логических блоков системы (фиг. 7) включает компаратор 57, управляемый ключ 58, компаратор 59, управляемый кдюч 60, компаратор 61, управляемый ключ 62, компаратор 63, управляемый ключ 64.
Блок-схема операции интегрирова- ния на скользящем интервале включа3
ет блок 65 задержки, сумматор 66, блок 67 интегрирования (фиг. 8).
Принципиальная схема пневматического пи-регулятора (фиг. 9) включает 68 сравнения, дроссель- Hbifi сумматор 69, элемент 70 сравнения, усилитель 71 мощности, элемент 72 сравнения, емкость 73, запорный клапан 74, отключающее реле 75.
Принятые обозначения: (t) - отклонение выходного сигнала от задания; С - управляюп(ий сигнал, С - задание для первого логического блока; С - задание для второго логического блока; С - задание для третьего логического блока; С, - задание для четвертого логического блока; ) - первый выходной сиг- Нал регулятора; Uf,(t) - второй выходной сигнал регулятора (сигнал ПД-составляющей закона регулирования) ;U2(t) - выходной сигнал разомкнутого контура; U(t) - совокупный управляющий сигнал разомкнутого и .замкнутого контуров управления; X(t) - основное контролируемое возмущение; X(t) - вход объекта по ка- налу управления; Y(t) - выход объекта; M(t) - выход обратной модели объекта; X(t) - выход второго блока умножения (восстановленный вход объекта по каналу управления); f(t) неконтролируемое возмущение; f (t) эквивалентное неконтролируемое щение, приведенное к входу объекта по каналу управления, f (t) - выход пятого сумматора; f в выход блока коррекции (оценка обобщенного неконтролируемого возмущения, приведенного к входу объекта по каналу управления) ; ЕЭКВ (-- усредненная на скользящем интервале оценка fэкь (t), f (t) - выход второго блока памяти; X(t) - выход датчика основного внешнего возмущения; UK(t) - выходной сигнал блока 21-, dY(t) - выходной сигнал блока 12; лУ(t) - выходной сигнал блока 14; дУ(t) - выходной сигнал блока 16; Pj сигнал, пропорциональный текущему значению регулируемого параметра ; Рц командный сигнал, ДЦ - регулируемый дроссель; ди-- дроссель; Рацх выходной сигнал регулятора; П - внешний переключатель рода работы;
tt-nllf А JI
А - режимы работы регулятора ручной и автоматический; Больше, Меньше - кнопки выбора знака приращения выходного
39494
сигнала в режиме ручного управления-, Ufj - напряжение внутре инего источника питания, Р1, Р2, РЗ - обмотки и контакты реле, Rp, Ср - резистор и конденсатор интегратора ручного управления; -и - опорные напряжения; МКД - модуль компенсации дрейфа; Д, - двуханодный стабилитрон; А1-А6 - рационные интегральные усилители; R - высокоомнЕ51й переменный резистор интегратора; ( - конденсатор интегратора; и, - выходной сигнал интегратора (И-составляющая); К - общий
15 коэффициент пропорциональности регулятора; - суммарный сигнал П-, И-, Д-составляющих закона регулирования, R, Сф - резистор и емкость апериодического звена (фильтра),
20 и ого выходной сигнал ограничителя}
и fj,, - сигнаUll ДЗ - диоды; -и„, лы ограничения выхода интегратора ручного управления на нижнем и верхнем уровнях; f - сигнал рассогласова- 25 ния заданного и текущего значений параметра;К - электронный аналоговый ключ; fy - длительность интервала усрел,нения в блоке 31;f,,,p (t-T)
экв
ЭК 6
сигнал f „„„ (f) J запаздывающий н.а
0 время Тд .
Система состоит из разомкнутого контура управления по возмущению, замкнутого контура управления по отклонению, цепей самонастройки разомкнутого контура, цепей расчета и компенсации эквивалентного возмущения, приведенного к входу объекта по каналу управления. Основное внешнее возмущение X(t) поступает на
Q первый вход объекта 7 и вход датчика 8, выход которого подключен к вторым входам блока 22 деления, первого 25 и второго 28 блоков умножения (фиг. 2). На первый вход измеg рителя 1 рассогласования поступает задающее воздействие g(t). На третьи входы логических блоков 17-20 поступают сигналы заданий соответственно С|, , С, С, и Cj. На первый вход перg вого логического блока 17 подается управляющий сигнал С. На третий вход объекта поступает неконтролируемое возмущение f(t). Замкнутый контур регулирования содержит последоваg тельно соединенные блоки 1-3,6 и 7, охваченные отрицательной обратной связью. Разомкнутый контур регулирования включает последовательно соединенные блоки 8, 10, 3, 6 и 7. Выходами замкнутого н разомкнутого контуров являются соответственно сигналы и(t) и U,(t).
Разомкнутый контур работает следующим образом,
В блоке 22 формируется сигнал от- ношения величин, пропорциональных входным переменным, который через управляемый ключ 23 поступает в первый блок 24 памяти. Сигналы, поступающие на первый и второй входы делителя 22, пропорциональны на практике (применительно, например, к области химической технологии) дозировкам соответственно реагента и сырья. Поэтому отношение сигналов, поступающее в первый блок 24 памяти, пропорционально отношению дозировок реагента и сырья. Запись выходного сигнала блока 22 деления в первом блоке 24 памяти производится только в том случае, когда блок 9 самонастройки выдает управляющий сигнал С на открытие ключа 23. Выходной сигнал блока 24 памяти поступает в блок 25 умножения в котором формируется выходной сигнал и(t) разомкнутого контура. Таким образом, выходной сигнал датчика 8 умножается в блоке 10 на некоторую величину ( коэффициент передачи блока 10), которая между актами самонастройки корректирующего фильтра 10 является величиной постоянной и хранится в блоке 24. При самонастройке блока 10 коэффициент передачи его изменяется скачкообразно, так как при наступлении состояния квазистатики новое отношение входных сигналов делителя 22 пропорционально текущему соотношению дозировок реагента и сырья, пропускается через ключ 23 и запоминается в первом блоке 24 памяти. При работе системы все изменения величины ХДь) будут в определенном соотношении, равном коэффициенту передачи блока 10, отслеживаться величиной и ,,(t) , Таким образом, корректирующий фильтр 10 представляет собой пропорциональное звено с переменным коэффициентом передачи, который имеет кусочно-постоянный характер.
Работа блока 9 самонастройки (фиг. 2). BJTOK 17 служит-для определения момента самонастройки. В блоках 18-20 проверяются услоппя кяази- статики объекта управления. Операции
выполняемые в Олоках 17-20 описываются соответст1 енио формулами
IU, (t)4f,, (t)b с, (1)
NY(t)U С, ,(2)
dUY(t)l
dt
dt 2
c.
(3) (4)
Сумма сигналов U,(t) и f (t) представляет собой реакцию замкнутого
контура системзл и цепей компенсации на действие всех видов возмущений. Изменяющих выход объекта. Если модуль указанной суммы сигналов, получаемый в блоке 16, превьш1ает некотоРУ о заданную величину Ср формула (1) и при этом объект находится в состоянии квазистатики, т.е. выполняются условия (2)-(4), то управляющий сигнал С проходит первый 17, второй
18, третий 19 и четвертый 20 логические блоки и поступает на управляюш е входы первого 23 и второго 32 управляемых ключей. Одновременно сигнал С поступает через второй вход в регулятор 2, где обнуляет интегральную составляющую сигнала U(t) . Пусть для конкретности регулятор 2 реализует ПИД-закон регулирования,тогда U,(t:)B dY(t)+B/r dY(t)dt +
(t)
+ В,
dt
(5)
где В , В, Bj - настраиваемые параметры регулятора. В результате акта самонастройки корректирующего фильтра 10 величина U, (t) определяется формулой
и, (t)BnY(t) ,Ъ,Щ. (6)
Причем переход системы в результате акта самонастройки корректируюп;е- го фильтра 10 на новое значение коэффициента его передачи не вызьшает
возмущения входного сигнала X(t) объекта 7. Действительно, при выполнении условий, проверяемых в блоках 17-20 системы, сигнал С открывает ключ 23, в результате чего сигнал
U(t) после суммирования с f(t) и вычитания из него в сумматоре 5 величины, определяемой выражением (6), проходит .блок 22 деления, первый управляемый кл10ч 23, записывается в
71
блоке 24 памяти, проходит первый бло 25 умножения и в виде сигнала U,,(t) поступает на второй вход первого сумматора 3. Операция обнуления И-сос- тавляющей приводит к тому, что условие, проверяемое в первом логическом блоке 17, не выполняется, в результате чего сигнал С не проходит логические блоки 17-20, и управляв- мый ключ 23 закрывается.
Таким образом, в первом блоке 24 памяти записано новое значение коэффициента передачи корректирующего фильтра 10. При этом выходной сигнал и (t) регулятора 2 уменьшен, а выходной сигнал UjCt) разомкнутого контура увеличен на И-составляющую выхода регулятора, имевшую место в составе и, (t) перед моментом самонастройки. Второй выход Un(t) регулятора 2 определяется выражением (6), т.е. представляет собой ПД-составляющую сигнала и., (t) . Сигнал ) вычитается в сумматоре 5 из сигнала U(t). Этим исключается двойное суммирование ПД- составляющей выхода регулятора 2 в сумматоре 3 и, следовательно, возмущение входа объекта. Цепь, связывающая второй выход регулятора 2 с вто- рым входом сумматора 5, позволяет повысить точность работы системы за счет исключения возмущения входа объекта при адаптации фильтра 10, когда ПД-составляющая U(t) отлична от нуля.
При дальнейшей работе системы величины и (t) и f jj,g (t), как реакции соответственно замкнутого контура и цепей компенсации системы на откло- нения Y(t) от задания, изменяются. Когда модуль указанной суммы сигналов превзойдет заданную величину С, производится анализ условий квазистатики объекта управления. При наступлении квазистатичного состояния выполняется следующий акт адаптации фильтра 10. Величины С,, С, С,, С,, являются априорно настраиваемыми параметрами блока 9. Изменение величины выходы регулятора 2 с течением времени характеризует изменение динамических характеристик канала управления -иСили) внешних условий функционирования системы. Величина модуля суммы сигналов U (t) и jf (t в состоянии квазистатики объекта 7 характеризует степень несоответствия управляющего сигнала X(t) величине
948
основного контролируемого возмущения X(t) в текущих условиях функционирования системы. Акт самонастройки фильтра 10 повышает качество компенсации на входе объекта возмущения X,(t) и, следовательно, качество работы всей системы в целом, так как часть возмущений, которая до этого проходила через объект, увеличивала дисперсию выходного параметра и нагружала обратную связь, будет скомпенсирована на его входе.
Компенсатор 11 (фиг. 1 и 2) предназначен для определения и компенсации эквивалентного возмущения, приведенного к входу объекта по каналу управления. Эта система обеспечивает высокое качество регулирования выходного параметра в условиях воздействия контролируемых возмущений значительной интенсивности при нестационарности объекта по коэффициенту передачи. Однако в условиях высокого уровня неконтролируемых возмущений f(t) замкнутый контур этой системы, предназначенный в основном для борьбы с ними, может не обеспечить необходимого качества регулирования ввиду отсутствия как средств адаптации его характеристик к переменным условиям функционирования, так и цепей компенсации зтих возмущений.
Цепи компенсатора совместно с замкнутым контуром управления (фиг. 3) включают в себя блоки 26, 27, 29 и 30. Они являются основой компенсатора (фиг. 1 и 2), ив них выполняется следующее: восстанавливается посредством блока 27 обратной модели вход объекта 7 из выходного сигнала объекта Y(t), определяется разность действительного X(t) и восстановленноЛ
ГО X(t:) входов объекта посредством сумматора 29. Полученный сигнал разности пропускается через блок 30 коррекции и суммируется с выходом регулятора с целью компенсации эквивалентного возмущения, приведенного к входу объекта по каналу управления. Модель объекта снимается по каналу
rx(t)
1x7
модель, снятая по указанному каналу, позволяет учитывать изменения обоих входных воздействий объекта X(t) и X, (t) . Выходом блока 27 обратной модели является сигнал оценки
- Y(t) . Это удобно тем, что,
M(t)
x(t)
Блок 28 умножения служит для получения из M(t) оценки входного воздействия X(t) объекта 7.
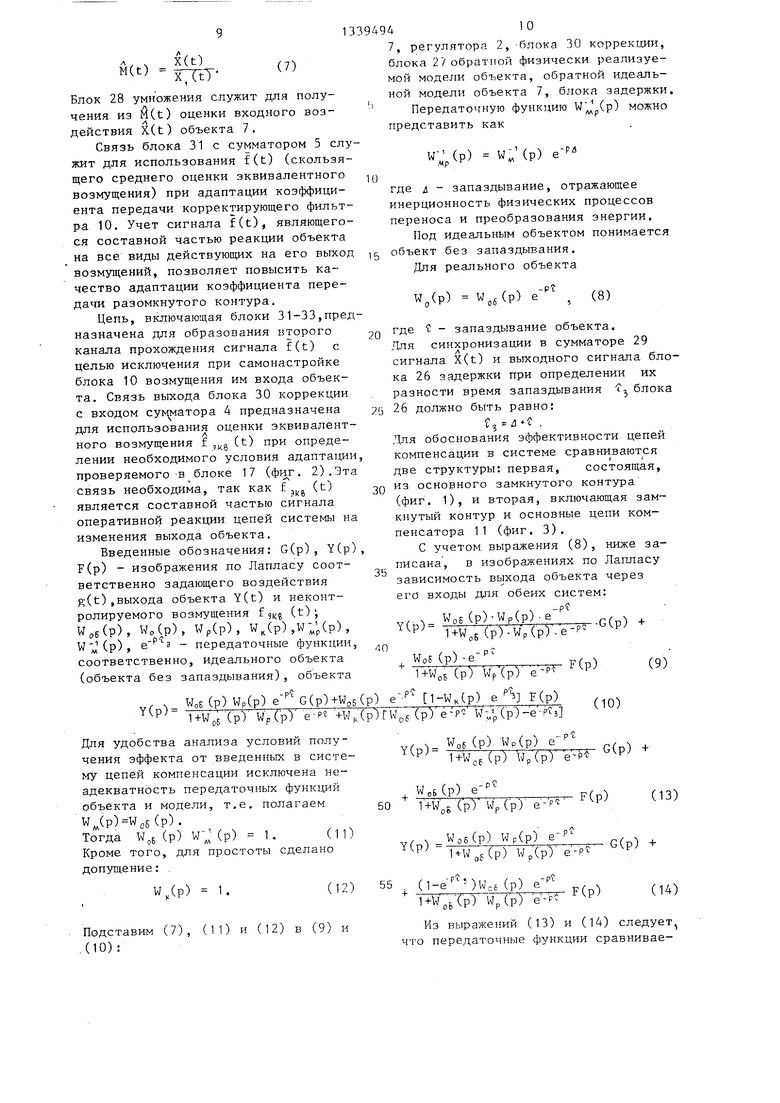
Связь блока 31 с сумматором 5 служит для использования f(t) (скользящего среднего оценки эквивалентного возмущения) при адаптации коэффициента передачи корректирующего фильтра 10, Учет сигнала f(t), являющегося составной частью реакции объекта на все виды действующих на его выход возмущений, позволяет повысить качество адаптации коэффициента передачи разомкнутого контура.
Цепь, включающая блоки 31-33,предназначена для образования второго канала прохождения сигнала f(t) с целью исключения при самонастройке блока 10 возмущения им входа объекта. Связь выхода блока 30 коррекции с входом су1 матора 4 предназначена для использования оценки эквивалентного возмущения f ,g (t) при определении необходимого условия адаптации, проверяемого -в блоке 17 (фит. 2), Эта связь необходима, так как f является составной частью оперативной реакции цепей системы на изменения выхода объекта.
Введенные обозначения: G(p), Y(p), F(p) - изображения по Лапласу соответственно задающего воздействия g(t).выхода объекта Y(t) и неконт133949410
7, р1егулятора 2, блока 30 коррекции, (7)блока 27 обратной физически реализуемой модели объекта, обратной идеальной модели объекта 7, блока задержки,
Передаточную функцию W (р) можно
представить как
w-;/p) w;
(р)
,-рй
10
15
где л - запаздывание, отражающее инерционность физических процессов переноса и преобразования энергии.
Под идеальным объектом понимается объект без запаздывания.
Для реального объекта
W/p)
«„б(р) е
-р
(8)
20
2
Ш ) сигнала
30
35
где t - запаздывание объекта. Для синхронизации в сумматоре 29 сигнала X(t) и выходного сигнала блока 26 задержки при определении их разности время запаздывания Г блока 26 должно быть равно:
С, .
Для обоснования эффективности цепей компенсации в системе сравниваются две структуры: первая, состоящая, из основного замкнутого контура (фиг. 1), и вторая, включающая замкнутый контур и основные цепи компенсатора 11 (фиг. 3).
С учетом, выражения (8), ниже записана, в изображениях по Лапласу зависимость выхода объекта через его входы для обеих систем:
Передаточную функцию W (р) можно
представить как
w-;/p) w;
(р)
,-рй
где л - запаздывание, отражающее инерционность физических процессов переноса и преобразования энергии.
Под идеальным объектом понимается объект без запаздывания.
Для реального объекта
W/p)
«„б(р) е
-р
(8)
где t - запаздывание объекта. Для синхронизации в сумматоре 29 сигнала X(t) и выходного сигнала блока 26 задержки при определении их разности время запаздывания Г блока 26 должно быть равно:
С, .
Для обоснования эффективности цепей компенсации в системе сравниваются две структуры: первая, состоящая, из основного замкнутого контура (фиг. 1), и вторая, включающая замкнутый контур и основные цепи компенсатора 11 (фиг. 3).
С учетом, выражения (8), ниже записана, в изображениях по Лапласу зависимость выхода объекта через его входы для обеих систем:
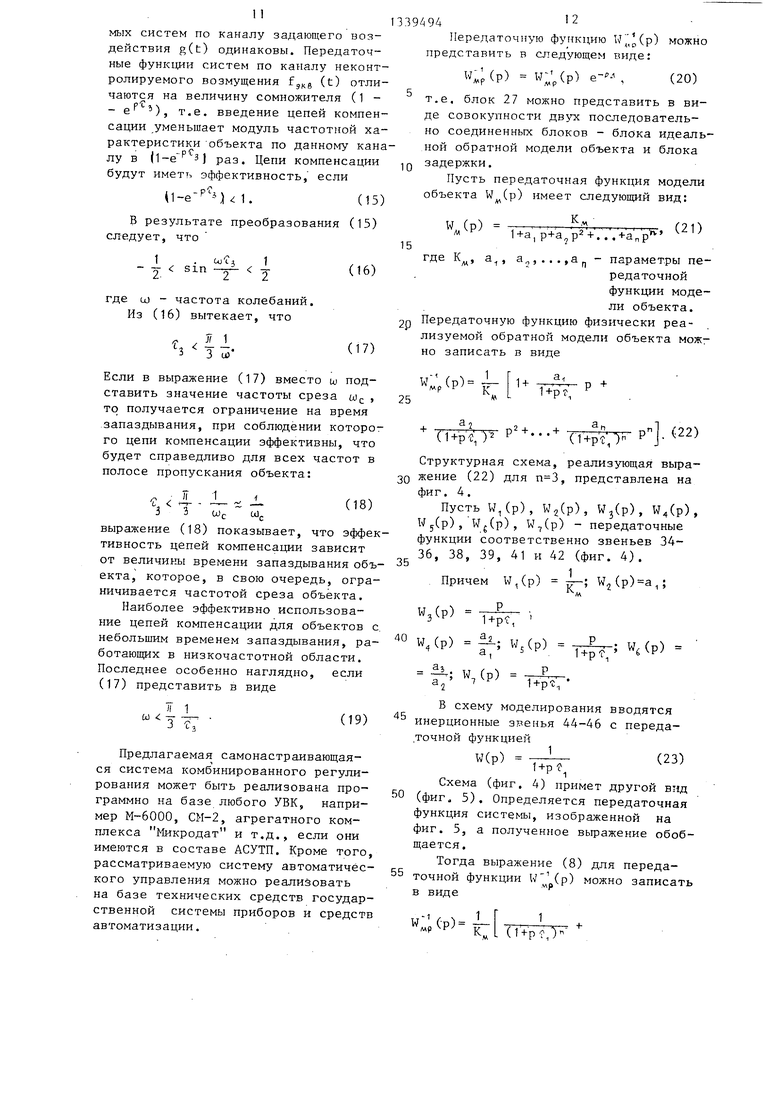
мых систем по каналу задающего воздействия g(t) одинаковы. Передаточные функции систем по каналу неконтролируемого возмущения (t) отличаются на величину сомножителя (1 - - ), т.е. введение цепей компенсации уменьщает модуль частотной характеристики объекта по данному каналу в ) раз. Цепи компенсации будут иметь эффективность, если
(1-е-Р -М 1.(15)
В результате преобразования (15) следует, что
1 . to-Tj
- у sin
где и) - частота колебаний. Из (16) вытекает, что
Т
И 1
3 U)
Если в выражение (17) вместо w подставить значение частоты среза о);- , то получается ограничение на время запаздывания, при соблюдении которого цепи компенсации эффективны, что будет справедливо для всех частот в полосе пропускания объекта:
-з
1
Ыг
f Ш,
(18) с ч
выражение (18) показывает, что эффективность цепей компенсации зависит от величины времени запаздывания объекта, которое, в свою очередь, ограничивается частотой среза объекта. Наиболее эффективно использование цепей компенсации для объектов с. небольшим временем запаздывания, работающих в низкочастотной области. Последнее особенно наглядно, если (17) представить в виде
Ji 1
c.3
Предлагаемая самонастраивающаяся система комб инированного регулирования может быть реализована программно на базе любого УВК, например М-6000, СМ-2, агрегатного комплекса Микродат и т.д., если они имеются в составе АСУТП. Кроме того, рассматриваемую систему автоматического управления можно реализовать на базе технических средств государственной системы приборов и средств автоматизации.
12
Передаточную функцию Wj ,(p) можно представить в следующем виде:
.;() W;/p) е- (20)
т.е. блок 27 можно представить в виде совокупности двух последовательно соединенных блоков - блока идеальной обратной модели объекта и блока Q задержки.
Пусть передаточная функция модели объекта W (р) имеет следующий вид:
К,
15
.Р Ha,p.a,.. где К, а, а,,, .
а - параметры пе2Р
редаточнои функции модели объекта.
Передаточную функцию физически реализуемой обратной модели объекта можно записать в виде
( i2
р2+...+
тт
(1+pY/)-
Структурная схема, реализующая выра- 30 жение (22) для , представлена на фиг. 4.
Пусть W,(p), W2(p), W3(p), ), W5(p), Wj(p), W,(p) - передаточные функции соответственно звеньев 3435
36, 38, 39, 41 и 42 (фиг. 4).
Причем W(p) :jv-; W2(p)
и
45
В схему моделирования вводятся инерционные звенья 44-46 с переда- ,точной фз нкцией
W(p)
1
(23)
1+Р,
Схема (фиг, 4) примет другой вид 50 (фиг, 5), Определяется передаточная функция системы, изображенной на фиг. 5, а полученное вьфажение обобщается.
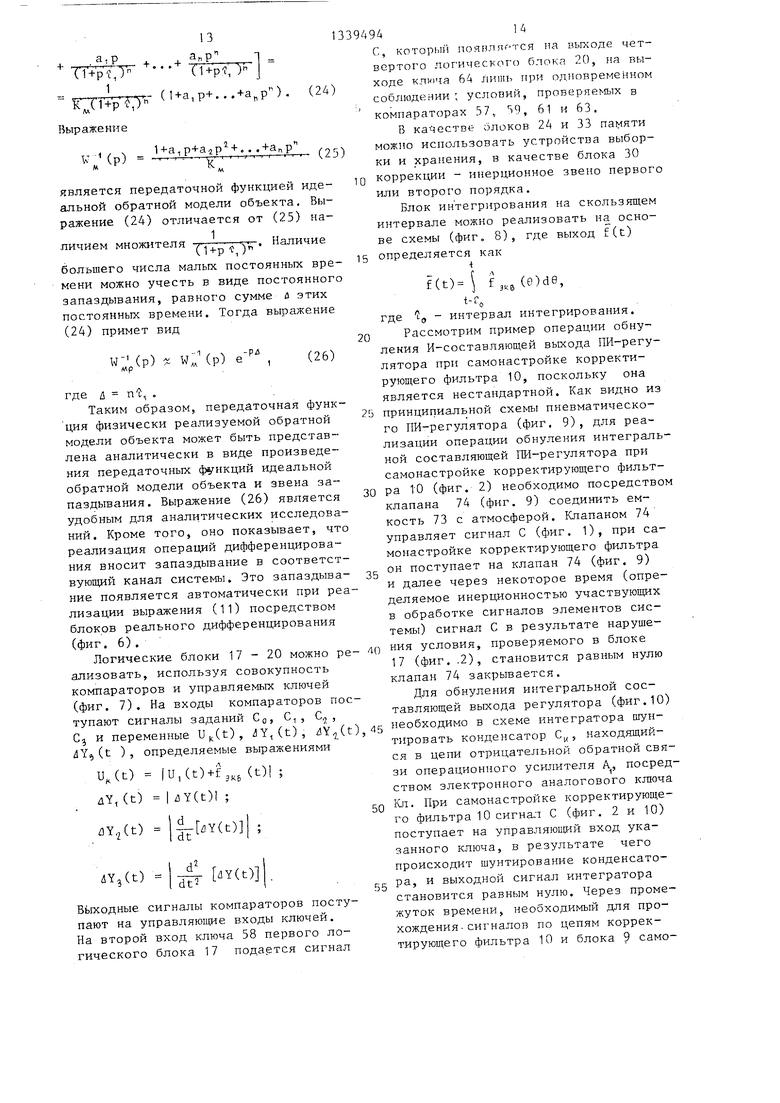
Тогда выражение (8) для переда- 5 точной функции W J (р) можно записать в виде
1
к.,
1
(1+р ,
. ...лР. . ( 1+ рТ,г 1
ji+pi-y
ражение
v-Cp)
13
,- (1+а,р+...+а„р ), (24)
1 р- а4рД+...+а„ р К .
(25)
является передаточной функцией идеальной обратной модели объекта. Выражение (24) отличается от (2.5) на1
личием множителя
vr-. Наличие
ТТ+Р f,)
большего числа малых постоянных времени можно учесть в виде постоянного запаздывания, равного сумме и этих постоянных времени. Тогда выражение (24) примет вид
w-;(p)
w;;; (р)
-рл
(26)
где д nt, .
Таким образом, передаточная функция физически реализуемой обратной модели объекта может быть представлена аналитически в виде произведения передаточных ф%гнкций идеальной обратной модели объекта и звена запаздывания. Выражение (26) является удобным для аналитических исследований. Кроме того, оно показывает, что реализация операций дифференцирования вносит запаздывание в соответствующий канал системы. Это запаздывание появляется автоматически при реализации выражения (11) посредством блоков реального дифференцирования (фиг. 6).
25
30
35
Рассмотрим пример операции обнуления И-составляющей выхода ПИ-регу- лятора при самонастройке корректирующего фильтра 10, поскольку она является нестандартной. Как видно из принципиаль ной схеьты пневматического пи-регулятора (фиг, 9), для реализации операции обнуления интеграль ной составляющей ПИ-регулятора при самонастройке корректирующего фильтра ТО (фиг. 2) необходимо посредство клапана 74 (фиг. 9) соединить емкость 73 с атмосферой. Клапаном 74 управляет сигнал С (фиг. 1), при самонастройке корректирующего фильтра он поступает на клапан 74 (фиг. 9) и далее через некоторое время (определяемое инерционностью участвующих в обработке сигналов элементов системы) сигнал С в результате нарущеЛогические блоки 17-20 можно ре- по ™я условия, проверяемого в блоке ализовать, используя совокупность (фиг. .2), становится равным нулю компараторов и управляемых ключей клапан 74 закрывается, (фиг. 7). На входы компараторов поступают сигналы заданий CQ, С,, С,,, Cj и переменные U,(t), Y,(t), 4Y,(t),45 необходимо в схеме интегратора щун
j
Для обнуления интегральной составляющей выхода регулятора (фиг.10
4Y, (t ) , определяемые выражениями U,(t) (U,(t)+f 3,, (t)l ; Y(t)l ; d
AY,(t) йЧ,М
dt
bY(t)
50
тировать конденсатор L, находящийся в цепи отрицательной обратной свя зи операционного усилителя А, посред ством электронного аналогового ключа Кл, При самонастройке корректирующего фильтра 10 сигнал С (фиг. 2 и 10) поступает на управляющий вход указанного ключа, в результате чего происходит шунтирование конденсатора, и выходной сигнал интегратора становится равным нулю. Через промежуток времени, необходимый для прохождения- сигналов по цепям корректирующего фильтра 10 и блока 9 само SY(t)
dt
dY(t)
Вьгходные сигналы компараторов поступают на управляющие входы ключей. На второй вход ключа 58 первого логического блока 17 подается сигнал
)
10
15
14
который пояг)ляртся на выходе четвертого логического блока 20, ia выходе клк1ча 64 Лишь при одновременном соблюдении; условий, проверяемых в компараторах 57,, 59, 61 и 63,
В качестве блоков 24 и 33 памяти можно использовать устройства выборки и хранения, в качестве блока 30 коррекции - инерционное звено первого или второго порядка.
Блок интегрирования на скользящем интервале можно реализовать на основе схемы (фиг„ 8), где выход f(t)
определяется как -I
f(t) f 3,, (0)de,
0
5
0
5
t- o где з - интервал интегрирования.
Рассмотрим пример операции обнуления И-составляющей выхода ПИ-регу- лятора при самонастройке корректирующего фильтра 10, поскольку она является нестандартной. Как видно из принципиаль ной схеьты пневматического пи-регулятора (фиг, 9), для реализации операции обнуления интегральной составляющей ПИ-регулятора при самонастройке корректирующего фильтра ТО (фиг. 2) необходимо посредством клапана 74 (фиг. 9) соединить емкость 73 с атмосферой. Клапаном 74 управляет сигнал С (фиг. 1), при самонастройке корректирующего фильтра он поступает на клапан 74 (фиг. 9) и далее через некоторое время (определяемое инерционностью участвующих в обработке сигналов элементов системы) сигнал С в результате наруще™я условия, проверяемого в блоке (фиг. .2), становится равным нулю клапан 74 закрывается, необходимо в схеме интегратора щун
Для обнуления интегральной составляющей выхода регулятора (фиг.10)
™я условия, проверяемого в блоке (фиг. .2), становится равным нулю клапан 74 закрывается, необходимо в схеме интегратора щун
j
тировать конденсатор L, находящийся в цепи отрицательной обратной связи операционного усилителя А, посредством электронного аналогового ключа Кл, При самонастройке корректирующего фильтра 10 сигнал С (фиг. 2 и 10) поступает на управляющий вход указанного ключа, в результате чего происходит шунтирование конденсатора, и выходной сигнал интегратора становится равным нулю. Через промежуток времени, необходимый для прохождения- сигналов по цепям корректирующего фильтра 10 и блока 9 самоI
настройки, в результате нарушения условия, проверяемого в логическом блоке 17, выходной сигнал блока 9 самонастройки становится равным нулю в результате чего ключ Кл (фиг. 10) закрывается и операция обнуления И- составляющей завершается.
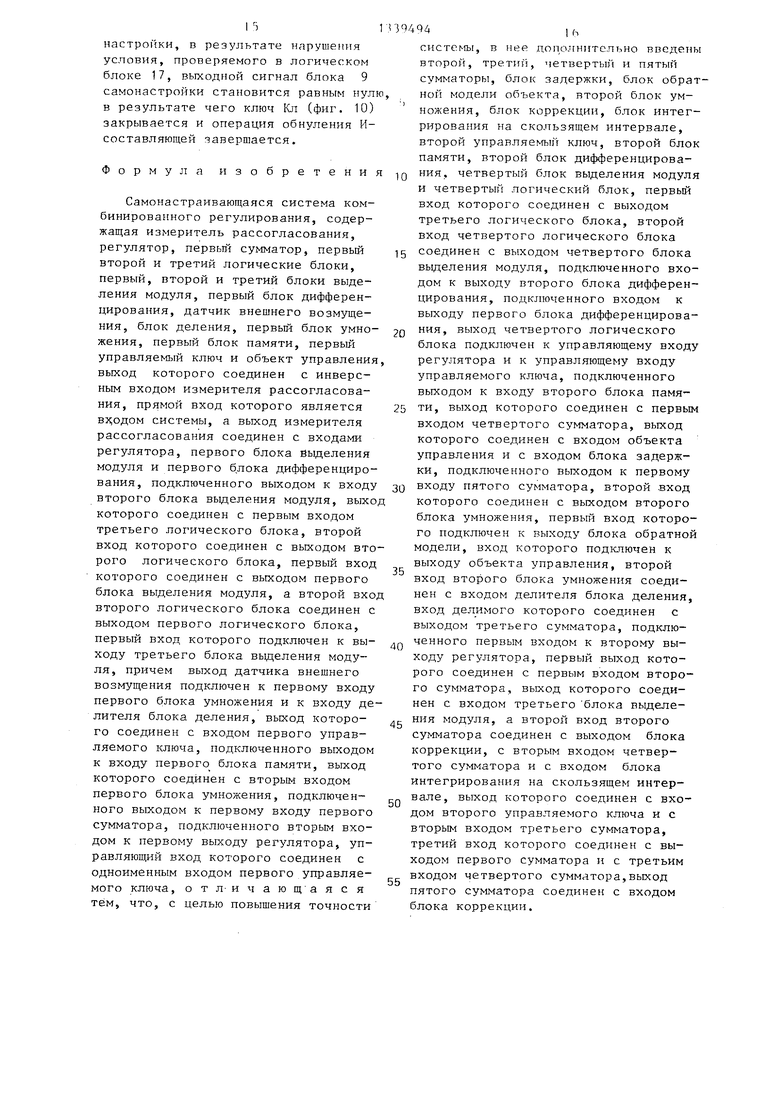
Формула изобретения
Самонастраивающаяся система комбинированного регулирования, содержащая измеритель рассогласования, регулятор, первьш сумматор, первый второй и третий логические блоки, первый, второй и третий блоки выделения модуля, первый блок дифференцирования, датчик внешнего возмущения, блок деления, первый блок умножения, первый блок памяти, первый управляемый ключ и объект управления выход которого соединен с инверсным входом измерителя рассогласования, прямой вход которого является системы, а выход измерителя рассогласования соединен с входами регулятора, первого блока выделения модуля и первого блока дифференцирования, подключенного выходом к входу второго блока вьщеления модуля, выхо которого соединен с первым входом третьего логического блока, второй вход которого соединен с выходом второго логического блока, первый вход которого соединен с выходом первого блока выделения модуля, а второй вхо второго логического блока соединен с выходом первого логического блока, первый вход которого подключен к выходу третьего блока выделения модуля, причем выход датчика внешнего возмущения подключен к первому входу первого блока умножения и к входу делителя блока деления, выход которого соединен с входом первого управляемого ключа, подключенного выходом к входу первого блока памяти, выход которого соединен с вторым входом первого блока умножения, подключенного выходом к первому входу первого сумматора, подключенного вторьм входом к первому выходу регулятора, управляющий вход которого соединен с одноименным входом первого управляемого ключа, о т л-и ч ающ ая с я тем, что, с целью повышения точности
,
, дд10
15
20
25
30
35
40
45
50
55
44ih
системы, в нее дополнительно введены второй, третий, четвертый и пятый сумматоры, блок задержки, блок обратной модели объекта, второй блок умножения, блок коррекции, блок интегрирования на скользящем интервале, второй управляемый ключ, второй блок памяти, второй блок дифференцирования, четвертый блок выделения модуля и четвертый логический блок, первый вход которого соединен с выходом третьего логического блока, второй вход четвертого логического блока соединен с выходом четвертого блока выделения модуля, подключенного входом к выходу второго блока дифференцирования, подключенного входом к выходу первого блока дифференцирования, выход четвертого логического блока подключен к управляющему входу регулятора и к заправляющему входу управляемого ключа, подключенного выходом к входу второго блока памяти, выход которого соединен с первым входом четвертого сумматора, выход которого соединен с входом объекта управления и с входом блока задержки, подключенного выходом к первому входу пятого сумматора, второй вход которого соединен с выходом второго блока умножения, первый вход которого подключен к выходу блока обратной модели, вход которого подключен к выходу объекта управления, второй вход второго блока умножения соединен с входом делителя блока деления, вход делимого которого соединен с выходом третьего сумматора, подключенного первым входом к второму выходу регулятора, первый выход которого соединен с первым входом второго сумматора, выход которого соединен с входом третьего блока вьщеления модуля, а второй вход второго сумматора соединен с выходом блока коррекции, с вторым входом четвертого сумматора и с входом блока интегрирования на скользящем интервале, выход которого соединен с входом второго управляемого ключа и с вторым входом третьего сумматора, третий вход которого соединен с выходом первого сумматора и с третьим входом четвертого сумматора,выход пятого сумматора соединен с входом блока коррекции.
фиг., г
fsKS М
т М1
J
(} .
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1388826A2 |
| Система автоматического управления | 1986 |
|
SU1409971A1 |
| Самонастраивающаяся система комбинированного регулирования | 1987 |
|
SU1509828A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1386957A1 |
| Самонастраивающаяся система комбинированного регулирования | 1985 |
|
SU1254433A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО РЕГУЛИРОВАНИЯ | 1989 |
|
RU2022313C1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2016 |
|
RU2616219C1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1511734A1 |
| КАСКАДНАЯ ДВУХКАНАЛЬНАЯ САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО УПРАВЛЕНИЯ | 2006 |
|
RU2327196C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |

Изобретение относится к самонастраивающимся системам автоматического управления и может быть использовано в химической и других отраслях промьполенности. Цель изобретения - повышение точности работы самонастраивающейся системы комбинированного регулирования нестационарных по статической характеристике объектов, функционирующих в услоyit) 00 со (Г 00 4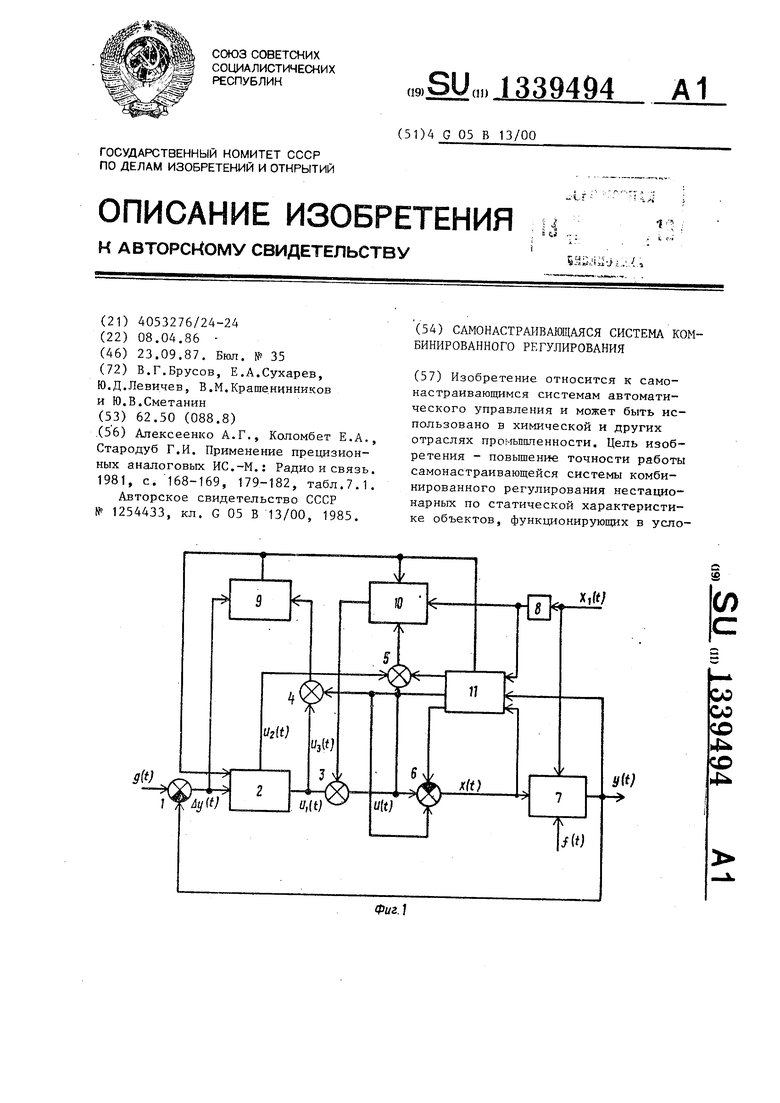
фие.З Я
3
M(t
Фиг А
5
игЛ
Ls
66
11
Фиг. 8
PSn
I-,7/
1
Фиг.Ю
-Hg
Ча
Составитель Е.Власов Редактор Б.Петраш Техред М.Ходанич Корректор А.Тяско
Заказ 4218/36 Тираж 863Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
