Изобретение относится к преобразовательной технике, в частности к регулированию статических преобразователей, работающих в режиме прерывистых TOKOiB на входе или на выходе.
Известны несколько типов преобразователей, содержащих в цепи по-стоянного тока реактор, ток через .который в зависимости от режима нагрузки может становиться прерывистым.
Известен «вертикальный опо,соб управления преобразователями, основанный на формировании пилообразного напряжения и сравнения его с управляющим напряжением, используемый, в частности, для управления стабИлизированными выпрямителями, работающими на Г-образ,ный LC-фильтр или выпрямителями, нагруженными на якорь мащины постоянного тока через сглаживающую индуктивность.
При «вертикальном способе управления внешняя характеристика преобразователей, являющаяся жесткой при работе в режиме непрерывных то:ксв через дроссель, оказывается падающей при переходе к режиму прерыВистых токов.
Наиболее близким по технической сущности к изобретению является способ управлен;1я преобразователями в режиме прерывистых токов путем сравнения пилообразного
напряжения с опорным напряжением, фИксации момента равенства этих напряжеиий, являющегося моментом управления в режиме прерывистых токов, и задержки относительно
этого момента на определенное время момента формирования импульса управления в режиме прерывистых токов с целью точной компенсации изменений внешней хара1ктеристики преобразователя. При этом способе управления требуемая задержка им пульса управления вычисляется точно путем интегрирования э. д. с. (или протиБО-э. д. с.) преобразователя. Для реализации этого способа требуется датчик э. д. с. (или противо-э. д. с.), интегратор и компаратор. Сложность осуществления способа делает целесообразным его применение лишь в преобразователях мощностью в несколько киловольтампер и выше.
Цель изобретения - упрощение способа, позволяющее с помощью достаточно простых аппаратурных средств, применение которых особенно целесообразно в преобразователях малой мощности, обеспечить необ.чодимую жесткость внешней характеристики преобра5 зователей при работе их в режиме прерывистых токов.
Достигается это тем, что в момент прерывания тока уменьшают крутизну п 1лообразного напряжения, и импульсы управления форм;фуют в моменты равенства опорного напряжения и участка пилообразного напряжения с уменьшенной крутизной.
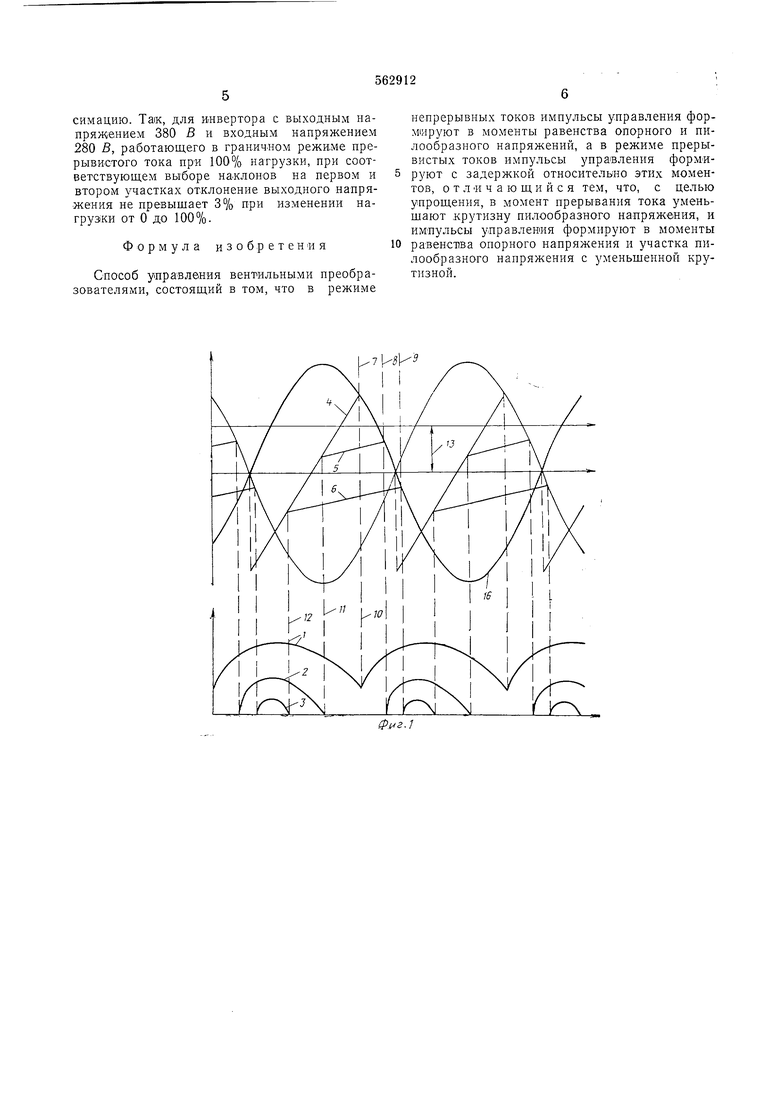
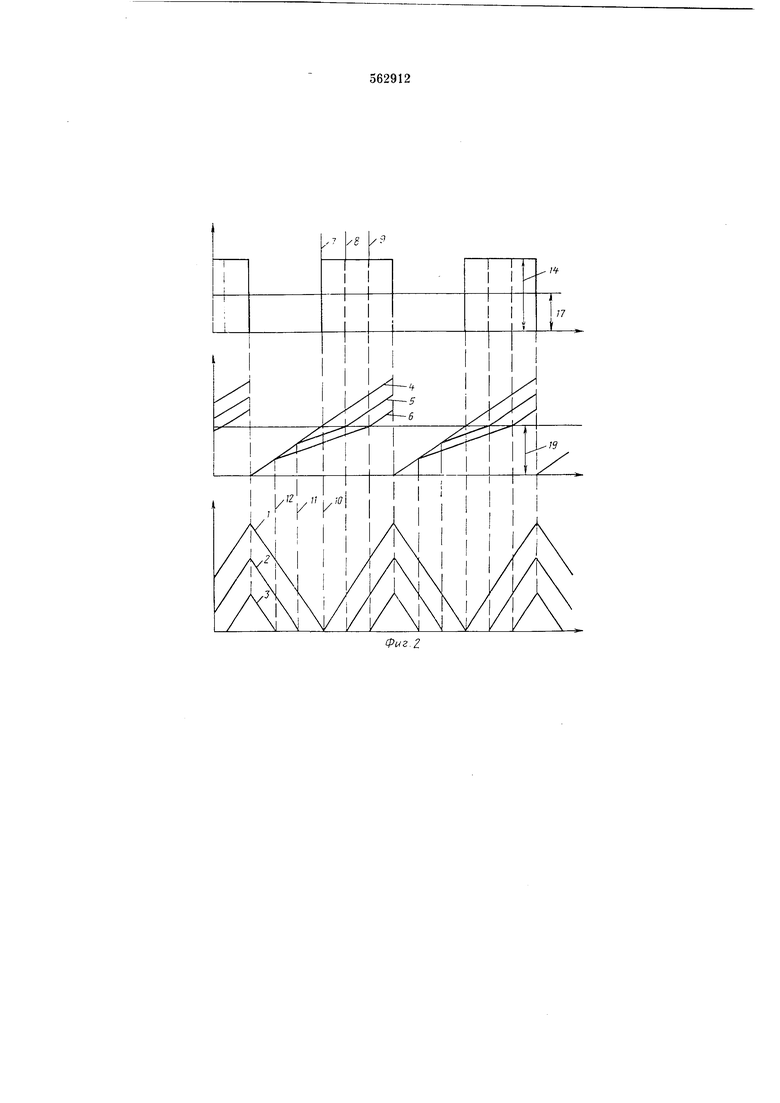
На фиг. I-3 приведены линейные диаграммы, иллюстрирующие предлагаемый способ применительно к однофазному инвертору, к преобразователю постоянного напряжения в постоянное и к упра:вляемому вьвпрЯМИтелю соотшетствеино; на фит. 4 - схема осуществления предлагаемого способа.
На чертежах приняты следующие цифровые обозначения; 1-3 - токи через дроссель, соответствующие трем значениям нагрузки; 4-6 - соответствующие пилообразные напряжения; 7-9 - соответствующИе моменты управления; 10-12 - соответствующие моменты обрыва тока; 13, 14, 15 - выходное напряжение инвертора, входное напряжение преобразователя постоянного напряжения в постоянное и входное напряжение управляемого вьшрямителя соответственно; 16, 17, 18 - выходное напряжение инвертора, выходное напряжение преобразователя постоянного напряжения в .постоянное и входное напряжение (напряжение сети) управляемого выпрямителя соответственно; 19 - опорное напряжение преобразователя постоянного напряжения в постоянное; 20 - напряжение управления управляемого .выпрямителя; 21 - датчик скважности то.ка; 22 - транзистор, определяющий изменение наклона пилы в бестоковой паузе; 23 - транзистор, задающий наклон «пилы, 24 - транзистор, синхронизирующий пилообразное напряжение; 25 - компаратор; 26-29 - резисторы; 30 - конденсатор; 31 - ток через дроссель; 32 - цепь синхропизации; 33 - напряжение управления; 34 - так к распределителю имлульсов и (далее) на выходные каскады и тиристоры; 35 - напряжение питания.
В режиме непрерывного входного тока / (см. фиг. 1) формирование импульса управлеНия происходит при пересечении пилообразного напряжения 4 с выходным напряжением 16 инвертора в момент 7. В режиме прерьшистого входного тока 2 (или 3) в момент // (или 12) обрыва тока уменьщается крутизна пилообразного напряжения, которое в этом случае принимает ло.маную форму 5 (или 6. Пересечение пилообразного напряжения 5 (или 6) с выходным напряжением инвертора 16 определяет момент 8 (или 9) фор-мирования управляющего импульса, который оказывается смещенным в сторону запаздывания от;{осительпо пмпульса в момент 7.
Аналогично происходит смещение моментов управления в преобразователе постоянного напряжения в постоянное (см. фиг. 2) и в управляемом выпрямителе (см. фиг. 3). В этих случаях в момент обрыва тока // (или 12} также происходит уменьщение крутизны пилообразного напряжения 5 (или 6) и момент управления определяется пересечением этого напряжения либо с опорным напряжением 19 лреобразователя, либо с напряжением управ,;ения 20 вьшрямителя.
Выбор наклона полого участка пилообразного напряжения целесообразно осуществлять по режиму наибольшей прерывистости (когда бестоковая пауза имеет наибольшую длительность). Для этого режима наклон полого участка определяется по двум точкам: по точке на крутом участке, соответствующей моменту обрыва тока, и по точке на крввой выходного напряжения инвертора (или опорного напряжения, илИ напряжения управления), соответствующей углу управления, обеспечивающему номинальное выходное напряжение и определяемому с помощью точного способа управления. Этот наклон полого участка при
других режимах прерывистости (с меньщими длительностяМИ бестокозых пауз), когда определение угла управления уже не является точным, обеспечивает наименьщую погрешность предлагаемого способа.
0 При веде«ная на фиг. 4 одна из возможных схем осуществления, иллюстрирующая предлагаемый способ, работает следующим образом.
Датчик скважности тока 21 при наличии
5 тока 31 формирует на своем выходе сигнал, который открывает транзистор 22. Это приводит к открытию транзистора 23, на базу которого поступает отрицательный потенциал от делителя; резистор 28 и параллельное соединение резисторов 26 и 27. Через резистор 29 и переход «оллектор-эмиттер трапзистора 23 происходит заряд конденсатора 30. Нилообразное напряжение с конденсатора поступает на один из .входов ком.паратора 25, на его второй (инверсный) вход нодается напряжение управления 33. В момент равенства этих напряжений происходит переброс компаратора и формирование импульса управления. Синхронизация пилообразного напряжения осуществляется периодическим разрядом конденсатора 30 через транзистор 24, управляемый от цепи синхронизации 32. Во время бестоковой паузы транзистор 22 закрыт; потенциал, поступающий на базу транзистора 23 от делителя на резисторах 28 и 27, оказывается менее отрицательным. Поэтому транзистор 23 будет более закрыт, чем в первом случае. Этому соответствует больщая постоянная времени заряда конденсатора 30 и соответственно мень0 щий наклон пилообразного напряжения.
Итак это осуществление способа по существу не требует изменения стандартной схемы фазового управления, 1кроме установки датчика скважности входного (или выходного)
55 тока. Для преобразователя постоянного напряжения в постоянное (см. фиг. 2), используемая аппроксимация является точной, если реактор фильтра линеен и линейны оба участка кривой пилообразного напряжения (во время бестоко0 вой паузы и на интервале, когда выходной ток отличен от нуля). У остальных двух приведенных типов преобразователей кривая пилообразного напряжения, состоящая из двух лин.ейных участков, обеспечивает лишь прибли5 женную, однако, достаточно точную, аппроксимацию. Так, для инвертора с выходным напряжением 380 В и входным напряжением 280 В, работающего в гракичиом режиме прерывистого тока прИ 100% нагрузки, при соответствующем выборе наклонов на первом и втором участках отклонение выходного напряжения не превышает 3% при измеиении нагрузки от О до 100%.
Формула изобретения
Способ управления вентильными преобразователями, состоящий в том, что в режиме
непрерывных токов импульсы управления формируют в моменты равенства опорного и пилообразного напряжений, а в режиме прерывистых токов импульсы управления формируют с задержкой относительно этих моментов, отличающийся тем, что, с целью упрощения, в момент прерывания тока умеиьщают крутизну пилообразного напряжения, и импульсы управления формируют в моменты равенства опорного напряжения и участка пилообразного напряжения с уменьшенной крутизной.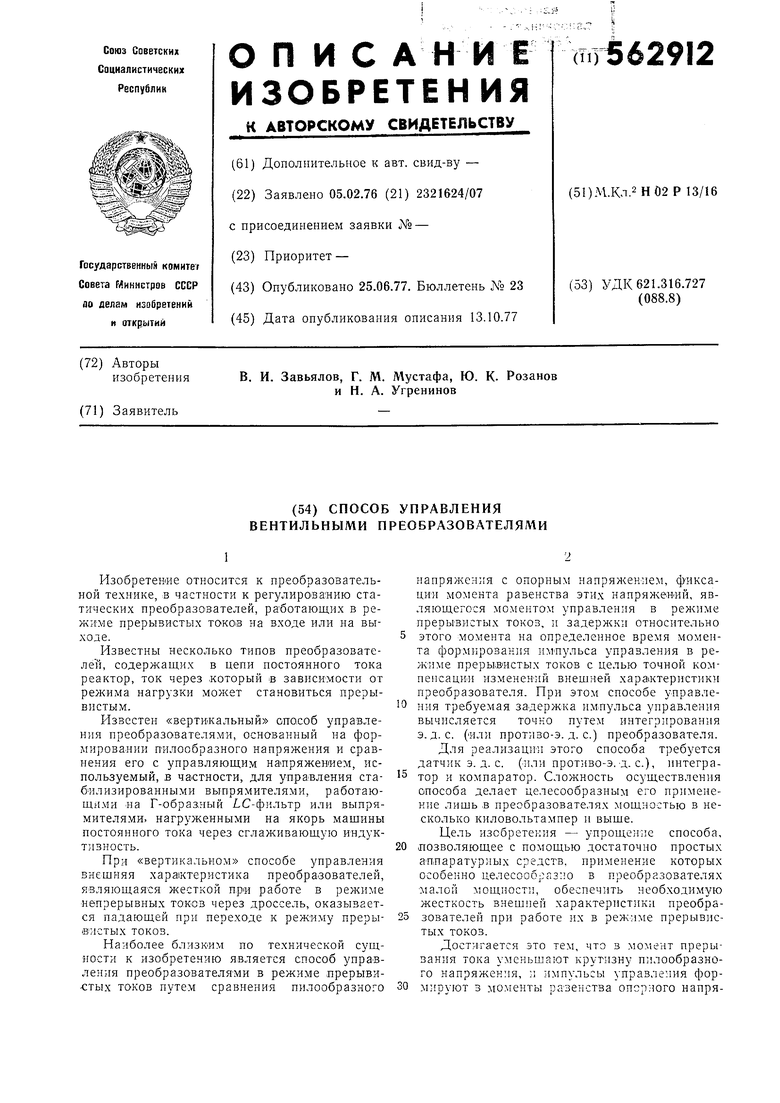

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления вентильным преобразователем | 1982 |
|
SU1083322A1 |
| Устройство для управления и защиты преобразователя | 1986 |
|
SU1403281A2 |
| Устройство для управления и защиты преобразователя | 1985 |
|
SU1336171A1 |
| Устройство для управления и защиты преобразователя | 1986 |
|
SU1399866A2 |
| Устройство для управления и защиты преобразователя | 1988 |
|
SU1522345A2 |
| Способ импульсной стабилизации двухтактного преобразователя постоянного напряжения в постоянное или переменное напряжение | 1987 |
|
SU1536362A1 |
| СПОСОБ ЗАЩИТЫ НАГРУЗКИ ПО МОЩНОСТИ И СТАБИЛИЗИРУЮЩЕГО ИСТОЧНИКА ВТОРИЧНОГО ЭЛЕКТРОПИТАНИЯ | 1995 |
|
RU2074493C1 |
| Вентильный электропривод постоянного тока | 1976 |
|
SU657561A1 |
| Стабилизированный преобразователь постоянного напряжения | 1990 |
|
SU1728950A1 |
| Способ управления инвертором | 1976 |
|
SU692061A1 |

-7ИИ
3
25
2 L
.30
0 33
032 Фиг.
