Итерой из известных вентильных элек троприводов постоянного тока выполнен по схеме с подчиненным регулированием тока 1 1 В этом электроприводе замкнутая система регулирования частоты вращения содержит регулятор частоты вращения и регулятор тока, состоящий из пропорционально-дифференциального и интегрального регуляторов, и блок компенсации нелинейности режима прерывистого тока, подключенный входом к датчику тока, а выходом к регулятору тока. Компенсация нелинейности режима прерывистого тока в электроприводе достигается за счет широтно-импульсно- го переключения структуры и параметров регулятора тока. Недостаток рассмотренных устройств заключается в том, что для фиксации ,, протекания тока через вентили необходимо использовать датчик тока с высокой степенью чувствительности. Это снижает помехозащищенность системы управления и, следовательно, эксплуатационную надежность электропривода. Наиболее близким техническим решением к данному изобретению является вентильный электропривод постоянного тока 2| , содержащий блок управления, реверсивный вентильный преобразователь, исполнительный двигатель постоянного тока и блок компенсации нелинейности режима прерывистого тока, подключенный к суммирующему элементу на входе звена импульсно- зового управления. Компенсация нелинейности режима прерывистого тока реализована путем введения на вход вентильного преобразования сигнала, функционально зависящего от разности между напряжением на входе звена импульсно-фазового управления вентильным преобразователем и напряжением, пропорциональным ЭДС двигателя. Целью изобретения является повышение надежности и стабильности характеристик электропривода с блоком компенсации нелинейности режима прерывистого тока. Поставленная цель достигается за сче того, что блок компенсации содержит последовательно соединенные звено фиксации начала бестоковой паузы, состоящее из трансформатора, резистора, конденсато и выпрямителя, пороговый элемент с дву мя входами, звено временной развертки напряжения и нелинейный элемент, приче первичная обмотка трансформатора звена фиксации начала бестоковой паузы через резистор и конденсатор этого звена под- Ключеиа к якорю двигателя, второй вход порогового элемента через дифференцирующую цепочку подключен к второму выходу звена импульсно-фазового управления, а начало и конец вторичной обмотки трансформатора, подключены к выпрямителю и, через ключи, к общей точке схемы управления. На фиг. 1 приведена функциональная схема предлагаемого электроприводй; на фиг. 2 - кривые токов Зп напряжений на входе звена импульсно- фазового управления, поясняющие принцип линеаризации характеристик электропривода; на фиг. 3 - кривые тока Зд и напряжения Ug на якоре двигателя в режиме прерывистого тока; на фиг. 4 - кривые напряжений на выходе звеньев блока компенсации в предлагаемом электроприводе. Электропривод состоит из блока управле-; ния 1, вентильного преобразователя 2, двигателя постоянного тока 3, блока 4 компенсации нелинейности характеристик электропривода в режиме прерьшистого тока. Блок управления 1 содержит управляющий элемент 5, выход которого подключен к реверсору 6 и логической схеме 7. Вход логической схемы 7 подключен к датчику тока 8, а один иа выходов - к реверсору 6. Выход реверсора 6 подсоединен к одному из входов суммирующего элемента 9, а выход суммирующего элемента 9 подключен к входу звена импуль- сно-фазового управления 1О. Выход звена 10 через переключатель 11, к которому подсоединен также второй выход логической схемы 7, подключен к управляющим переходам вентилей преобразователя 2. Блок 4 компенсаций нелинейности режима прерывистого тока содержит трансформатор 12, первичная обмотка которого через резистор 13 и конденсатор 14 подключена к якорю двигателя 3. Вторичная обмотка трансформатора 12 через вьптрямитель 15 подсоединена к одному из входов порогового элемента 16. Второй вход порогового элемента 16 через дифференцирующее звено 17 подсоединен ко второму выходу звена импульсно-фааового управления 1О блока управления 1. Выход порогового элемента 16 подключен к входу звена временной развертки напряжения 18, выход которого через нелинейный элемент 19 подсоединен к входу суммирующего элемента 9 блока
упраплоиия .1.. Концьс вторичной обмотки трансфо)м.:1тора 1.2 чероз к.мючн 20, 2.1 подключены тпкже к общей точке схемы. Входные цепи уцрлплеиия ключей 20, 21 подсоединены к выходу лог-нческой схемы
7блока управления 1.
Электропривод заботает следующим образом.
Управляющее напряжение от звена 5 через реверсор 6 подается на вход суммирующего элемента 9. Выходное напряжение суммирующего элемента 9 поступает на вход звепа импульсно- |)ааового управления 10. Импульс 1 от звена 10 через переключатель 11 подаются на управляющие переходы тиристоров одной из групп реверсивного преобразователя 2 питающего якорную цепь двигателя постоянного тока 3.
Выходное напряжение управляющего элемента 5 поступает также на нход логической схемы 7, на второй вход которой подается напряжение от датчика тока 8, При этом знак напряжения на выходе датчика тока 8 не зависит от направления тока в якоре двигателя 3,
8зависимости от состояния логической схемы 7 осуществляется переключение элементов в звене 6 таким образом, что знак напряжения на выходе звена 6 меняется только во время переключения групп вентилей в реверсивном преобразователе 2. Переключение групп в вентильном преобразователе 2 происходит в зависимости от знака напряжения на выходе управляющего элемента 5 и состояния вентилей отключаемой группы. При изменении знака выходного напряжения управляющего элемента 5 меняется знак напряжения на выходе звена 6 и на входе звена импульсно-фазового управления 10 Вследствие изменения знака входного напряжения звена 10 уг-ол открытия вентилей преобразователя 2 становится близким к максимальному, и ток в работающей группе вентилей прекращается. При этом изменяется состояние логической схемы 7, которая управляет переключателем 11, распределяющим импульсы управления от звена импульсно-фазового управления 10 по группам вентилей преобразователя 2. Выходные цепи звена
10 отключаются от управляющих переходов обесточенной группы вентилей и подключаются к управляющим переходам вступающей в работу группы. Одновременно происходит изменение полярности напряже 1ИЯ на выходе звена 6, и после переключения групп вентилей преобразователя 2 знак напряжения на выходе реверсора 6 не зависит от знака напряжения на вы- . ходе управляющего элемента 5 и направления тока в якоре двигателя 3. Напряжение и g якоря двигателя 3 подается на вход блока компенсации 4.
Принцип компенсации нелинейности характеристик в предлагаемом электроприподе заключается в том, что на вход звена импульсно-4изового управления подается напряжение нелинейной отрицательной
обратной связи по величине бестоковой паузы в сиЛовой части вентильного преобразователя. Введение сигнала отрицательной обратной связи по величине бестоковой паузы эквивалентно введению сигнала положительной обратной связи по длительности импульса тока, что следует из
соотнощения
W ,
,
(11
где S- длительность бестоковой паузы, в рад;
Л. - длительность импульса тока, в рад;
m - число фаз вентильного преобразователя.
Приближенная величина приращения
напряжения ди на входе звена импульсно-фазового управления, необходимого для компенсации нелинейности характеристик вентильного электропривода в режиме прерывистого тока якоря двигателя, определяется пз соотнощения
3.
(f)f. (2)
40 где k - коэффициент пропорциональности, имеющий размерность в рад;
С - коэффициент, зависящий от параметров электропривода и числа фаз вентильного преобразователя.
45Это соотношение на основании вь ражения (1) можно записать в виде
(),.,f(),
СЗ)
где
П-Г1-1 Г1 . . olfn ,
(irj-k ; )-iSs4- l-k метим, что в реальных электроприводах , U 0 , k nf(.J)
-D
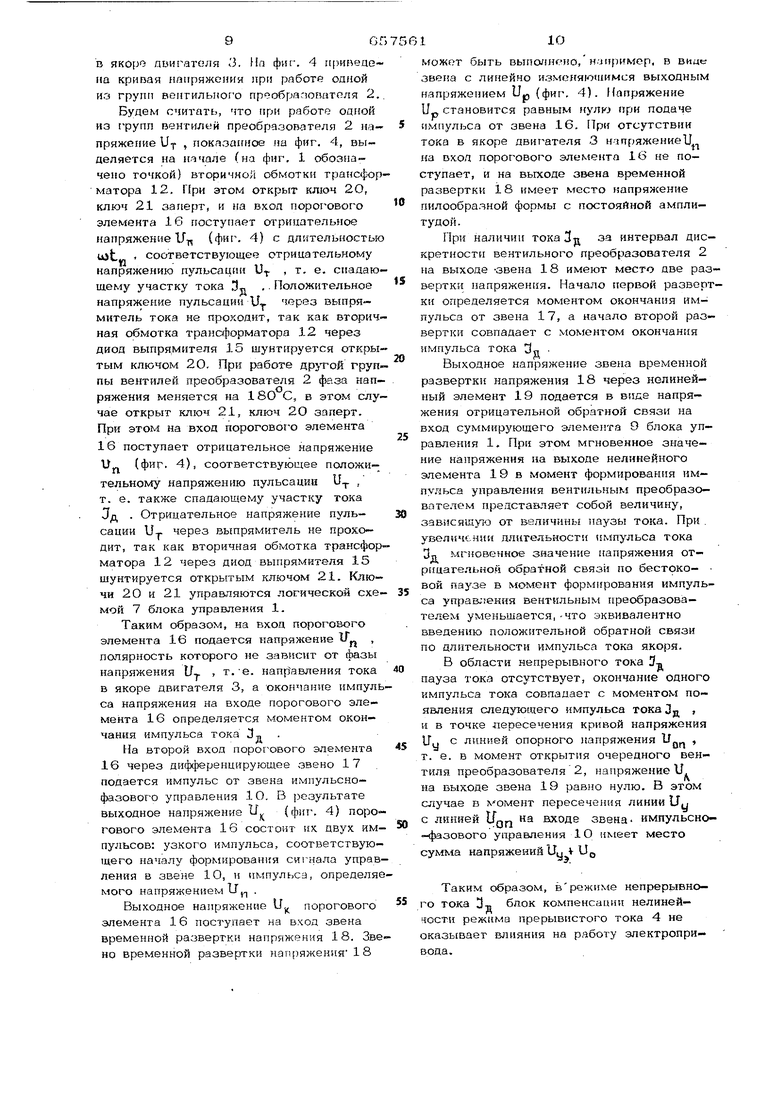
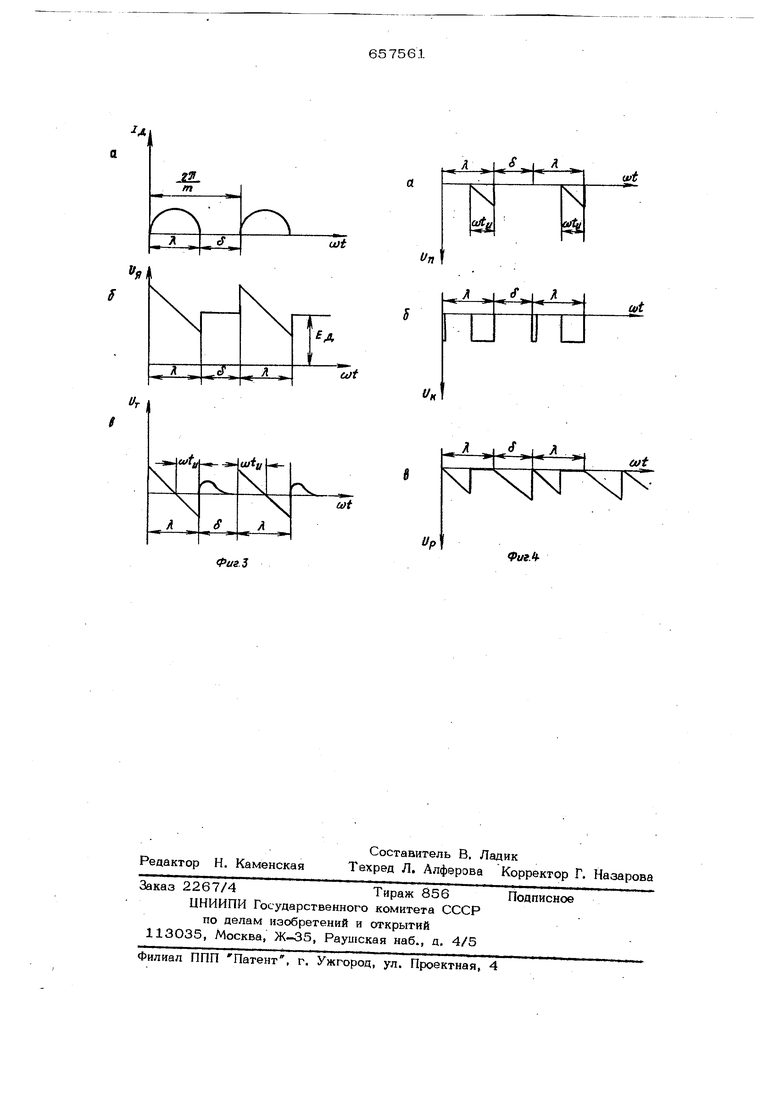
также положительна. Таким образом, компенсация нелиней.нести характеристик может быть осущес влена путем введения в суммирующий элемент на входе звена импульсно-фазо вого управления постоянного напряжения и и напряжения нелинейной обратной отрицательной связи по З . При этом для токов прерывистого режима, близких к гранично-непрерывному, эта зависимость практически линейна (при малы 6 ), нелинейность же в наибольшей сте пени сказывается при малых токах в як ре двигателя. В предлагаемом электроприводе зако изменения напряжения U на выходе бл ка компенсации 4 определяется соотношением . K/u)tH {(ы1), i где О - круговая частота питающей т. - текущее время. При отсутствии тока Зд в якоре дви гателя 3 амплитуда напряжения 1Г имее максимальное значение, равное и -k .4.il . Так как в этом случаебз.- , а лУ должно быть равно нулю, то на основани выражения (3) на вход суммирующего элемента 9 должно быть подано напряже ние смещения Iff, , компенсирующее Ид В реальном электроприводе напряжение Jf на вход суммирующего элемента 9 не подается, а компенсация осущ ствляется в звене импульсно-фазового управления 10. Мгновенное значение напряжения U g на выходе блока компенсации 4 в момен появления очередного импульса управления вентильным преобразователем 2, т. в конце паузы тока Зд , определяется из выражения (4) п6дстановкойил1: & .84.f(&), Ч Напряжениси г поступает на вход суммирующего элемента 9. При этом на входе звена импульсно-фазового управления 10 имеет место суммарное напряжение U у , определяемое зависимостью ) На фиг. 2 приведена диагра.мма напряже ний Dy tJy, входе звена 1О при двух значениях Зд Зд гока якоря двигателя 3 для напряжения Uy, на выходе yiipaiviHioirioro эломолта о. При sTOMtJp Jp, На фиг, 2 nfUieceuo линейное опорное напряжение Ug, н звене импульсно-фэзового управления 10. Напряжения Uy на фиг. 2 для упрощения графических построений условно показаны линейными. Как видно из ||)иг. 2, начало развертки напряжения Uy« по окончании импульса тока 3 отстает от начала развертки напряжения по окончании импульса тока Зд . Это приводит к уменьшению угла открытия вентилей преобразователя 2 на величинудС и к увеличению напряжения на якоре двигателя 3. Таким образом, на вход звена импуль- сно- фазового управления 10 вводится сигнал компенсации нелинейности характеристик электропривода в области прерывистого тока. Входная цепь блока компенсации 4 состоит из последовательно соединенных первичной обмотки трансформатора 12, резистора 13 и конденсатора 14. При этом постоянная составляющая напряжения Uq на первичную обмотку трансформатора 12 не поступает, и напряжение первичной обмотки трансформатора 12 соответствует напряжению пульсаций на якоре двигателя 3. Эти пульсации напряжения определяются синусоидальной формой напря7кения сети, питающего вентильный преобразователь 2, к током якоря двигателя 3. Кривые тока якоря двигателя 3 , напряжения на якоре двигателя UQ и .напряжения U на вторичной обмотке трансформатора 12 в области прерывистого тока якоря двигателя, приведены на фиг. 3 а, б, в. На фиг. 3 б показан также уровень ЭДС дв игателя Ед , фаза напряжения U определяется работающей группой вентилей преобразователя 2, .т. е. направлением тока Зд в якоре двигателя 3 и не ,eняeтcя при работе этой группы как в выпрямительном, так и в инверторном режимах. При работе группы в инверторном режиме меняется лишь знак напряжения на конденсаторе 14. При изменении направления тока в якоре двигателя 3, т. е. при переключении групп вентилей преобразователя 2,. фа за напряжения U,меняется на 18О . Параметры резистора 13 к конденсатора 14 выбираются таким образом, что обеспечивается практически скачкообраз,ное изменение полярности напряжения jU в момент окончания импульса тока в )0 пвигатоля 3. tin фиг. 4 цзивеае на кривая нямряжоиия при работе одной из групп вентильного прообра-поватоля 2 Будем считать, что при работе одной из tpynn вентилей преобразователя 2 напряжение UT , показанное на фиг. 4, вы деляется на н-ччале (на фиг. 1 обозначепо точкой) вторичной обмотки трансфор матора 12, этом открыт ключ 2О, ключ 21 , и на гзхол норогового элемента 16 ностунает отрицательное напряжение 1Г-П (фиг. 4) с длительностью liit, соответствующее отрицательному напряжению пульсацпн U-j. , т. е. спадаю щему участку тока 3, , Положительное напряжение пульсанин U через вьшря митель тока не проходит, так как вторич ная обмотка трансформатора 12 через диод выпрямителя 15 шунтируется откры тым ключом 20, При работе другой груп пы вентилей преобразователя 2 фаза напряжения меняется на 180 С, в этом слу чае открыт ключ 21, ключ 2О заперт. При этом на вход порогового элемента 16 поступает отрицательное напряжение Uj (фиг. 4), соответствующее положительному напряжению пульсацин U , т. е. также спадающему участку тока Лд . Отрицательное напряжение пульсации и через выпрямитель не прохо дит, так как вторичная обмотка трансфор матора 12 через диод выпрямителя 15 шунтируется открытым ключом 21. Ключи 20 и 21 управляются логической схе мой 7 блока управления 1. Таким образом, на вход порогового элемента 16 подается напряжение Uj , папярность которого не зависит от фазы напряжения Lf , т.-е. напр авления тока в якоре двигателя 3, а окончание импуль са напряжения на входе порогового элемента 16 определяется моментом окончания импульса тока Лд На второй вход порогового элемента 16 через дифференцирующее звено 17 подается импульс от звена импульснофазового управления 1О. В результате выходное напряжение U (фиг. 4) порогового элемента 16 состоит их двух импульсов: узкого импульса, соответствующего началу формирования сигнала управ ления в звене 1О, и импульса, определяе мого напряжением и j . Выходное напряжение U порогового элемента 16 поступает на вход звена временной развертки напряжения 18. Зве но временной развертки наг)яжения 18 может быть выполнено, HanfUfMop, в ви«е с линейно изменя1о цимся выходным напряжением Up {фиг, 4), Напряжение Up становится равным нулю при подаче импульса от звена 16, При отсутствии тока в якоре двигателя 3 н-чпряжениеП на вход порогового элемента 16 не поступает, и на выходе звена временной развертки 18 имеет место напряжение пилообразной формы с постояйной амплитудой. При наличии тока Лд за интервал дискретности вентильного преобразователя 2 на выходе -звена 18 имеют место две развертки напряжения. Начало первой развертки определяется моментом окончания импульса от звена 17, а начало второй развертки совпадает с моментом окончания импульса тока 3 . Выходное напряжение звена временной развертки напряжения 18 через нелинейный элемент 19 подается в виде напряжения отрицательной обратной связи на вход суммирующего элемента 9 блока управления 1. При этом мгновенное значение напряжения на выходе нелинейного ачемента 19 в момент (|юрмирования импульса управления преобразователем представляет собой величину, завися яую от величины паузы тока. При . увеличения длительности пмпульса тока 3т, мгновенное значение напряжения отрицательной обратной связи по бестоко- вой паузе в NiOMeHT формирования импульса управления вентильным феобразова- телем уменьшается, -что эквивалентно введению положительной обратной связи по длительности импульса тока якоря. В области непрерывного тока Э-, пауза тока отсутствует, окончание одного импульса тока совпадает с моментом появления следующего импульса тока Зд , и в точке лересечения кривой напряжения У линией опорного напряжения И , т. е. в момент открытия очередного вентиля преобразователя 2, напряжение U. на выходе звена 19 равно нулю. В этом случае в момент пересечения линии Uy с лиияей UQ на входе звена- импульсно-фазового управления 10 имеет место сумма напряжений Uy V U Таким образом, врежиме непрерывно- го тока З-п блок компенсации нелиней- |Ц дости режима прерывистого тока 4 не оказывает влияния на работу электропривода. В режиме прерывистого тока J пред лагаемый электропривод имеет более ста бильные характеристики гю сравнению с прототипом. Это связано с тем, что вых ное напряжение U блока компенсации 4 определяется непосредственно величиной бестоковой паузы в силовой цепи вентиль ного преобразователя 2, или длительностью импульсов тока J , и не зависит от других параметров электропривода, на пример от значений начальной фазы импу сов в звене 10. Воздействие на характе стики электропривода блока компенсации 4 в режиме непрерывного тока 3,, исклю чается по самому принципу компенсации нелинейности режима прерывистого тока. в предлагаемом электроприводе. Так как в отличие от прототипа компенсация нелинейности характеристик эле тропривода в режиме прерывистого тока осуществляется без введения в блок ком пенсации информации о величине частоты вращения или ЭДС двигателя, такой элек ропривод может быть использован как в замкнутой системе регулирования частот вращения вала двигателя, так и в разомкнутой по частоте вращения электроприво ,да, а также в однозонных и в двухзонны электроприводах. Указанные отличия приводят к повы- щению надежности и стабильности характеристик предлагаемого электропривода по сравнению с прототипом. Формула изобретения Вентильный электропривод постоянного тока, содержащий блок управления, состоящий из управляющего элемента, выход которого через реверсор и суммирующий элемент соединен с входом звена импульсно-фазового управления, и логической схемы с датчиком состояния вентилей, один из выходов которой соединен с реверсором, а один из ее входов - с выходом управляющего элемента, вентильный преобразователь, вход которого через переключатель соединен с одним из выходов звена импульсно-фазового управления, один из выходов преобразователя подключен к исполнительному двигателю, а второй выход через датчик состояния вентилей соединен с логической схемой, и блок компенсации нелинейности режима прерыв.истого тока с двумя ключами, выход которого подключен к суммир тощему элементу, а входы ключей соединены с логической схемой, отличающийся тем, что, с целью повыщения надежности и стабильности характеристик электропривода, блок компенсации содержит последовательно соединенные звено фиксации начала бестоковой паузы, состоящее из трансформатора, резистора, конденсатора и выпрямителя, пороговый элемент с двумя входами, звено временной развертки напряжения и нелинейный элемент, причем первичная обмотка трансформатора звена фиксации начала бестоковой паузы через резистор и конденсатор этого звена подключена к якорю двигателя, второй вход порогового элемента через дифференцирующую цепочку подключен к второму входу звена «мпульснофазового управления, а начало и конец вторичной обмотки трансформатора подключены к выпрямителю и, через ключи, к общей точке схемы управления. Источники информации, принятые во внимание при экспертизе l.Techibthe MitteiEun en ЛСУ-l eefunken, 1971, т. 61, 7, с. 371-374. 2. Динамика вентильного электропривода постоянного тока, под ред. А. Д, Поздеева, М., Энергия, 1975, с. 85,
а
u/t fus.l
cat
(Jn



| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления вентильным преобразователем | 1980 |
|
SU955506A1 |
| Реверсивный вентильный электропривод постоянного тока | 1978 |
|
SU758450A1 |
| Способ управления вентильным преобразователем | 1982 |
|
SU1083322A1 |
| Способ управления вентильным преобразователем | 1984 |
|
SU1264278A1 |
| Устройство для адаптивного регулирования тока вентильного электропривода | 1981 |
|
SU1067580A1 |
| Электропривод постоянного тока | 1977 |
|
SU681528A1 |
| Электропривод постоянного тока с реверсором | 1991 |
|
SU1826117A1 |
| Вентильный электропривод постоянного тока | 1985 |
|
SU1372567A1 |
| Способ раздельного управления реверсивным вентильным электроприводом и устройство для его осуществления | 1984 |
|
SU1354377A1 |
| Логическое переключающее устройство для реверсивного управляемого выпрямителя | 1987 |
|
SU1422322A2 |

r
lof.
M tfLfU)t
Риг.З
VH
Т
N xhTxjv
Up
ФигЛ
