1
Устройство относится « области аналоговой вычислительной техники.
Из1вестно устройство для моделирования изгибаемого стержня, содерж анхее резисторы и -имвертары 1.
Наиболее близки М по техничеокой сущности iK рассматриваемому является устройство для .моделирования балок на -сплошном уиругом основа,нии, содержанцее блоки моделирования ПОСТОЯННОЙ жесткости стержня, блоки М0|делир01вания переменной жесткости стержяя, управляемые и неуправляемые источники тока, ключи, инверторы, удвоители напряжения, (блоки у1нр1а;вления |2.
Известные устройства мотут моделировать балку при условии двусторонней «связи балки с оснО;ва,нием, когда нреднолагается, что балка от основания не отрывается. В случае, когда имеет место отрыв балки от основания в Некоторых сечениях системы, альфа-аналоговая мадель применена быть не может. Кроме того, альфа-аналоговая модель предназначена для моделирования систем уравнения с положительными коэффициентами при неизвестных, чего в рассматриваемой конструкдии нет, поэтому необходима установка дополнительных нивертаров тока и напряжения, что делает альфа-модель громоздкой. Необходимо создать модель, лиш©н1ную «едостатков альфа аналотовой модели, с учетам возможности отрыва балКй. от унругого основания, что альфа-аналоговая модель выполнить не (может. Однвм из недостатков известных устройств является излишняя сложность.
Цель изобретения - унрон;ение устройства и ра(сширение его функциональных возможностей- достигается тем, что в нем вход через параллельно соединенные пер(вый управляемый, первый неуправляемый источни(ки тока и первый блок моделирования переменной жесткости стержня подключен к шине Нулевого потенциала, а через последовательно Соединенные первый блок моделирования постоянной жесткости стержня и второй блок моделирования переменной жесткости стержня - к выходу пер;вого инвертора, который соединен с входам первого удвоителя ;напряжения. Второй вход устройства через параллельно соединенные второй ynpiaBляемый, второй неуправляемый источ,ни1КИ тока и третий блок моделирования наременной жесткости стерЖНя подключен к шине нулевого потенциала, а через последовательно соединенные второй блок моделирования постоянной жесткости стержня и , четвертый блок модели1рования (переменной же1ст«ост1и Стержня - к выходу второго Ийнертор-а, который соединен с входо(М второго удвоителя на(пр:яжен-ия. Третий вход устройства через параллельво |сое1динен(ные третий уцравляемый iH Т1р:етий ,нбУП:ра1Вляе Мый источиики тока подключен .к шине нулевого потенциала « через (последовательно ооедмненные третий |бло;л моделирования постояиной жасткосгн |стержн.я и пятый блок .моделкровалия лере(Мениой жест|К ОСТ1и стер.жн,я соедИНен с выходам 1третьего инвертора.
Чатвертый вход устройства через па(раллельно соедииенные четвертый унра1вляе.мый и четвертый неушравляемый источники тока нодключел к шиие нулевого иютанциала и через лоследавательно юоединенлые четве ртый ,бло1К МодолИ1рованИ|Я лостояниой жесткости юторжня ,и шестой блок 1моделн.ро1ван1ня переменной жесткости стрежня соединен с выхо,дом четвертого И1нверто;ра, вх-од которого под-ключен к 1первому входу устройства и через лосладовательно оойдинеиные нятый блок модел-ирс1ван1ия лостоязнной жеоткости сте|ржня и садьмой блок Моделирования нераменлой Ж0СТ1КОСТ1И стержня соединен с входом третьего инвертор а.
Посл ещнИЙ лодключан к вторОМу входу у€трой1ства, через лараллельно 1соеди11ен1ныс шестой блок моделирования носто:Я1нн.ой жестлоСти стерЖЕя и восьмой блок .моделирования переменной жесткости стержня тодключеш-юму ж чет1верто му входу устройства, -который через ПОследовательно -соедннввные девятый блок Моделирования леременной жесткости стержня и седьмой блок моделирования постоянной жеат1кости стержня лодключен к третьему входу устройства. Причем третий вход устройства через параллельно соединенные восьмой блок модел.нр01Валия ностояиной жесткости стержня и десятый блок моделиравалия переменной жесткости стержня лодключен к лерВОМу входу УОтройства, соединен с входом BiTOporo Инвертора, входом лервогю блока уп1р:авления и через лоследовательно соединенные девятый блок аюделировайия постоянной жесткости стержня и одиннадцатый блок моделирования леременной жесткости стержня с выходом второто удвои-теля на пряже1ния.
Чет1вертый вход устройства соединен с входом первого ин1вертора, в,ходом второго блока управления и через последовательно соединевные десятый блок модела-гройания постоянной жесткости стержня и двенадцатый бло1к моделнрО1ва1Ния переменной .жесткости Стержня - с выходом лервого удвоителя напряжения.
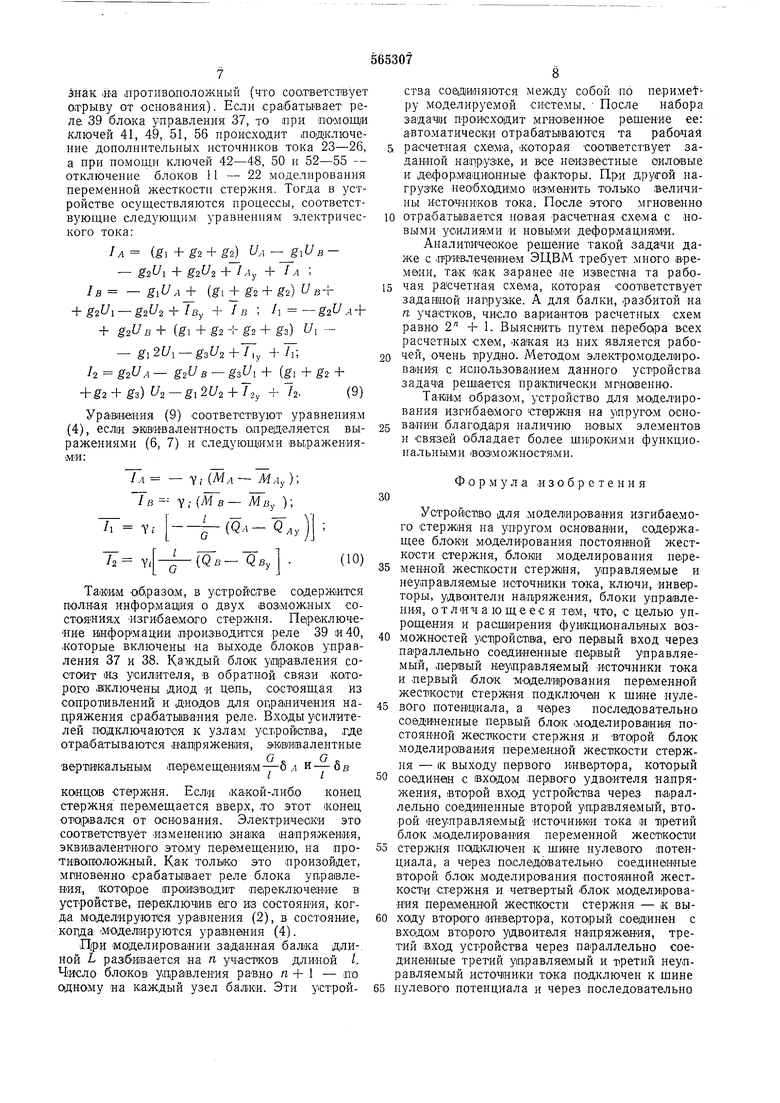
На фиг. 1 показана схема устройства для моделирования изгибаемого стержня на улругом оонован1ни; на фиг. 2 - балка на yinругом ооновании.
Устройство содержит блодси I -10 модел.ироВНния 1пос,тоятеной жесткости стержня, при этом лроводимости блоков 1, 3, 4, 5, 7, 10 равны g2, блоков 2, 8, 9 - g,, а блока 6-g-s, блаки 11-22 .Моделирования неременной жест1коет:,и стержня, .при этом троводи1МОсти блоков М, 17ранны G4, блоков 12, 16, 19,22-03, блока 13 - GJ, блоков 14, 15 - С/г, блока
18 - GS, блоков 20, 21 - GG, управляем е источнюки т01ка 23 - 26, равные соответственно /л , /в , /I, /2, НЗуПравляемые источники тока 27 - 30, равные соответственно. ..„, I By , /ij., /L,. , инверторы 31 - 34, удвоители нашряЖСНия 35 и 36, для которых отношения сапротр влен1ий обратной Связи .Ro и входных R и RI равны соответственно
-- 1,- 2, блоки управлеНИя 37, 38, /с/ I
содсрл апдие на выходах реле управления 39, 40, ключи 41 - 56 реле 39, ключи 57 - 72 реле 40.
Устройство лредназначено для решення сложной .конструктивно-нелинейной за.даЧИ строительной механики. В КОНСТ1руктИвНОнелгонейной системе заранее неизвестна рабочая расчетная Схем а, зависяшая от характера и величины «нешней нагрузки. Для балки, лежашей на yinpyro-M основании, заранее не известно, в каких сечениях .оиа связана с основанием, а с каких оторвана от него. Такая системна является также Конструктивно-иелииейгной.
Балку ши1р(иной b на унругоМ винклерОа.с:коМ oCHOBaHitH с коэффициентом ПОСтели длиной L (см. фиг. 2) разбивают на стержни одинаковой длины / С жесткостью Ef. Погонный коэффициент ЖесткоСти основания
/г - /г,6.(1)
УравнеНия для оцре.деления кОНцевых нзГибающих моментов М i и Mi и концевых моперечных iCHvi Q .1 и Q в в стержне АВ длиной /, лежаЩе1.м на упругом основЗНИи, при повороте концов стержня на углы (рл и фj и 1вергш альном перемещении концов на б. и бд 1имеют ВИД
М.л 41 (1 + 0,25 D) ср ., 4+ 2/ (1-0,5Z)) ф в + i { + D) .1-
- i (l-D) -5-6 в + М.ц, ;
Мй 2( (1-0.5D) ср , + 41 (1 +0,25/3) фй+ i (l-D)l
G
-i (1 +D М
D) (f,3-T 5 где ЛГь, и ЛГ;;,. , Q.i,., и Q«.,- - изгибающие моменты и поперечные силы ло коицам жестко заа1омлен ного .стержня на упругол основании от внешней нагрузки, - головная жест1КССть, 720 El + Ы В выражении (3) k определяется но формуле (1). Предпола.гают, что в ., коща один нз концов стефжня АВ оторвется от основа1Н1ИЯ, связь с ocHOBaiHEeiM теряет весь стержень. Такое допущение вполне аправдано.при разбивке балкн на достаточное число участков длиной /. Стержень, потерЯ;ВЩ|И.й связь с основанием и- как бы висящий в воздухе, определяется следующими уравнениями при расчете его метадоМ перем&щеиий: М л 4 I ф . 1 -f- 2 i ф и + t G М .в 2 ( ф,1 4 г ф в ЧGS в + Mj -QA 1фл + i(pB - (.16 где Мл и Л1 в , Q.1 и QB - изгибающие моменты ,и потефечные силы но «овцам жеСТКО защамленного стержня дл1иной / от BHemiiiefl па1груэки, -когда ушруго-е Оспование отсутствует. Осабелшость устройства при 1моделировапии стержня на упругом освова1нин с учетом отрыва от основания состоит в том, что оио должно Соответствовать двум устойчивьим состояниям работы стержня: стержень имеет связь с основанием (уравпения 2) либо за счет того, что левый .или правый конец стержня получил перемещение вверх, оторван от основания (уравнения 4). Устройство с указанными трабованиямн .показано на фиг. 1. , Состоян1ие схемы устройства с положением .ключей реле, показанньм на фиг. 1, соответствует уравне1 1ИЯ1М (2) - стержень имеет связь с ооиовакием - и характарлзуется следующ.И|Ми уравнениями электрического тока, записа1Н1ны1М-и по .методу у:злоБЫ|Х потепциалов SiGi . „ , , g2G3 , -( 82 + GS + G4)f;л - Us - {g2+ GZ) Ui + + -(;2+Ъ, : ., : s /..,+ (. g, + G2-f . 4- GIgi + G, GS I г n gzGa rr, 1 --i- 04) ty/jr-y, - ( + Й + G3g2 + GS + GS) f/2 + 77., ; - (§2 + Ga) /л4 Я1 G, + g2 + G2 + i Ge + /,,; g3+G5 t/ A - (Я2 + GE) и , g, -f G2 , + /2, Si+ GJ gl + Ge Для того чтобы уравнения (5) были поны уравнениям (2), 1неОбходи1МО примеь 3Hia-KonapeiMenHbn i -масштаб моделирова. Тогда /в ; л - Y ; / Y Дву; .,. - t/ в Y в ; л - Y /. - Y,- (i.j ; 1 Y; ( /2у-т/-;г ву ) ; --т(, и 2 Y«g2 ki; gz /f- (7) G, k . G, kiD- GS - /e-- - -; G, k-2iD- GS i (1-ЗД)/7 A 2/(1-Д)j Oe - k- , (8) Y/ Y.v - масштабные коэффициенTOKCis, нaJnpяжe Pий и проводимостей. Отрыв одного конца стержня от упругого ования фиксирует реле 39 или 40. После батывания одного из реле (или двух одременно, что соответствует отрыву от оса-шия двух концов стержня) в схеме проодит переключение. Оно происходит тог«огда на пряжепне, подаваемое на вход управления 37 или 38, -моняет свой
знак йа противоположный (что соо,гветст вует о,грыву от основания). Еслн .срабатывает реле 39 блока управления 37, то при помощи ключей 41, 49, 51, 56 пронсходнт пойключенне донолннтельных источннков тока 23-26, а при помощи ключей 42-48, 50 и 52-55 - отключение блоков II - 22 моделирования переменной жесткости стержня. Тогда в устройстве осуществляются процессы, соответствующие следующим уравнеииям электрического тока:
/л (gi + g2 + g2) UA g2Ul + gzUz + I Ay + I A ; (gi + g2 + Sz UB-T+ - + by + /B ; + (gl + g2 -1- g2 + gl t/i - gl 2f/i - g3U2 +77y + 7Г;
/2 gzUA - gz B- + (I + g2 + + 2 -h 3) t/2 -g, + 4- /2.(9)
Уравнения (9) соответствуют уравнениям (4), если знвИвалентность определяется выражениями (6, 7) и следующими 1вы,ражениям«:
Ti- - Y,- (Л1л -lw.iy); /в в- Мду );
77 Y,- I-(,
(10)
( Qfiy
/2 Yi
Таким об,разам, в устройстве содержится полиая информация о двух возможных состояииах Изгибаомого сте-рж-ня. Переключе«яе информации П роиз;водится реле 39 и 40, .которые включены на выходе бло.ков управления 37 и 3,8. Каждый блок управления состоит из усилителя, в обратной связи которого включены диод и цепь, состоящая из сопротивлений и диодов для ог.рапичения напряжения срабатыюайия реле. Входы усилителей подключаются к узлам устройют/ва, где отрабатываются иапряжения, эквивалентные
С s „ G S
верТ1И кальныМ перемещениям-о л и - о в
концов стержня. Если какой-либо конец стержня перемещается вверх, то этот «онец оторвался от основания. Электриче-аки это соответствует изменению знака напряжения, эквивалентного этому перемещению, на противоположный. Как толыко это произойдет, мпновенно срабатывает реле блока управления, которое производит переключение в устройстве, переключив его из состояния, когда МОделируются уравнения (2), в состояние, когща Моделируются уравнения (4).
Моделировании заданная балка дли-. ной L разбивается иа п уча стков длиной I. Число блоков управления равно п + 1 - по одному и-а каждый узел баласи. Эти устрой..
ства соединяются между собой по ne.pHMefру моделируемой системы. После набора задачи происходит мгновенное решение ее: автоматически отрабатываются та р абочая расчетная схемка, которая соот1ветствует заданпой на1лрузке, и Все неизвестные силовые и деформ ационные факторы. При другой нагрузке необходимо изменить только величины источников тока. После этого мгновенно
отрабатывается новая расчетная схема с иовыми усилиами и новыми деформациями.
Аналитическое решение такой задачи даже с .привлечемием ЭЦВМ требует много времени, так как заранее ие известна та рабочая расчетная схем-а, котор ая соответствует заданной налрузке. А для балки, .разбитой на п участков, число ва;риаитов расчетных схем равно 2 -г 1. Выяснить путем переборна всех расчетных схем, какая из них является рабочей, очень трудно. Методом электромоделирования с иопользоваиием данного устройства задача решается практически мгновенно.
Таким образом, устройство для моделирования изгибаемого стержня па упругом ооновапии благодаря наличию новых элементов и связей обладает более широкими функциональными возможностями.
Формула .изобретения
Устройспво для моделирования изгибаемого стержня на упругом основании, содержащее блоки моделирования постоянной жесткости стержня, бломи моделирования переменной жест1кости стерж1ня, управляемые и неуправляемые источники тока, ключи, инверторы, удвоители напряжения, блоки управления, отличающееся тем, что, с целью упрощения и расширения функциональных возможностей успройств1а, ею первый вход через параллельно соединенные первый управляемый, первый неупра(вляемый источники тока и первый блок МОяелирования переменной жесткости стержня подключай к щине нулевОГо потенциала, а через последовательно соединенные первый блок моделирования постоянной жестокости стержня и второй блок моделирования переменной жесткости стержня - 1К выходу первого инвертора, который
соединен с в.ходом первого удвоителя -напряжения, второй вход устройства через параллельно соединенные второй управляемый, второй неуправляемый источники тока и третий блок .моделирования переменной жесфкости
стержня подключен к шиие нулево го потенциала, а через последовательно соединенные второй блок моделирования постоянной жесткости стержня и четвертый блок м,оделирования переменной жест1кости стержня - к выходу второго инвертора, который соединен с входом второго удвоителя напряжения, третий В.ХОД устройства через параллельно соединеиные третий управляемый и третий неуправляемый источники тока подключен к шине
пулевого потенциала и через последовательно
соедшеиные третий блок моделирбватшя постоанной жоспкооти стержня и шятый блок модел:ирава«ия переме-штой жест1костн стержня соединен с выходом третьего 1И1Нв&ртора, четвертый .вход устройства через Па|раллельно соадинонные четвертый утравляемый и четвертый неуправляемый источники тока подключен к шине нулевого .потенциала я через посл-едовательно соадиненные четвертый блок моделиравания постоянной жесткости стержня и шестой блок .моделироваиия переменной жеспкости стержня сое(Дин.е1Н с выходом четвертого ин1Бертора, вход которого подключен к (первому входу устройства « через лоследавательно соаднненные пятый блок М1оделирования постоян«ой жестко1СТ1И стержня и седьмой блок моделирования переменной жесткости стержня соадииен с входом третьего И|Н-вертора, который подключен к вто1рому входу устройства, через параллельно соединенные шестой блок моделирова1ния .постоянной жесткости стержня и восьмой блок модел.ирова1ния леремевной жесткости стержия подключенному к четвертому входу устройства, который через последовательно соединенные девятый блок моделирования переменной жесткости стержня и седьмой блок маделиравания постоянной жесткости стержня подключен к третьему входу устройства, который через параллельно соадиненные восьмой блок моделирования постояп. жесткости стерж.ня и десятый блок моделирования переменной жесткости стержня подключен к первому Бходу устройства, причем третий
вход устройства соединен с входом второго инвертора, входом первого блока управления и через пооледовательно соединенные девятый блок моделирования постоянной жесткости стержня и одиннадцатый блок модел1ирования переменпой жесткости стержня с выходом второго удвоителя напряжения, четвертый ВХод устройства соединен с входом первого инвертора, Входом второго управления и через последовательно соединенные
десятый блок .моделирования постоянной жесткости стержня 1И двенадцатый блок моделиравания переменной жесткости стержня с выхсдол первого удвоителя напряжения. Источники информации,
принятые во внимание при экспертизе
1. Пухов Г. Е., Васильева В. В., Степанов А. Е., Токарева О. Н. Электричеокое моделирование задач строительной механики, гад. АН УССР, Киев, 1963, с. 255.
2. Семинар Методы математического модеЛИрованяя и теория электрических цепей, О. Н. Токарев а, доклад «Электронное моделирование простраяственных ортогональных рам иа сплошном упругом основании, Общество «Знание УССР, Киев, 1964, с. 11.
г b/ -И Ч-V SJ -Г
t
Ыд|/УдЧ|9 Хй
,
25 -t, д7 л-i-j if-i-Ii--e-$ I-i-«
L i
--I I ii r--1
r±±p,rEl
I1. 11 г1 .1 Ii .
-Wc
i-S Tf-P-,r-,
TT i i
L.---T -bf-J
-tl)
n
-HZIH
31
J5±



| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования узла рамы | 1975 |
|
SU561975A1 |
| Устройство для моделирования сжаторастянутого стержня | 1974 |
|
SU561974A1 |
| Устройство для моделирования стержня | 1977 |
|
SU746600A1 |
| Устройство для моделирования изгибаемого стержня | 1977 |
|
SU674050A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПРЯМОЛИНЕЙНОГО ИЗГИБАЕМОГО СТЕРЖНЯ | 1973 |
|
SU397939A1 |
| Устройство для моделирования балки на нелинейном упругом основании | 1977 |
|
SU682913A1 |
| Устройство для моделирования двигателя постоянного тока | 1981 |
|
SU955120A1 |
| Функциональный преобразователь двух переменных | 1977 |
|
SU680000A1 |
| Устройство для моделирования стержня | 1977 |
|
SU744651A1 |
| Устройство для моделирования стержневых рам | 1977 |
|
SU717794A1 |
Л w fl
..,, -..
j -/7:7 ;.:); -4- г ) с -4- - - J-.-Tf-;Г
