1
Устройство относится к аналоговой вычислительной технике.
Известно устройство для моделироваиия стержня, содержащее резисторы и инверторы 1. Наиболее близким к изобретению по технической сущности является устройство для моделирования сжато-растянутого стержня, содержащее четырехузловую резистивную модель, к первому узлу которой подключе-ны выходы первого и второго и входы третьего и четвертого блоков задания жесткостных характеристик, ко второму узлу модели подключены выходы четвертого и пятого и входы шестого и седьмого -блоков задания жесткостных характеристик, к третьему узлу модели подключены выходы восьмого и девятого и ВХОДЫ пятого и десятого блоков задания жесткостных характеристик и к четвертому узлу .модели подключены выходы третьего, десятого, одиннадцатого и двенадцатого блоков задания жесткостных характеристик 2. Однако известные устройства не могут моделировать стерЖНИ, если они выполнены из нелинейного материала.
Цель изобретения состоит в расширении функциональных возможностей устройства. В предлагаемом устройстве это достигается тем, что в него введены сумматор напряжений, блок упра1вления, инверторы и блоки коррекции усилия в стержне, выходы которых
соединены соответственно с первым, вторым, третьим и четвертым узлами модели, а входы соединены с шиной нулевого потенциала, к каждому из четырех узлов модели подключены входы инверторов, причем выход первого инвертора соединен с первым входом сумматора напряжений и с входами девятого блока задания жесткостных характеристик и второго инвертора, выход которого соединен с входом первого блока задания жесткостных характеристик, выход третьего инвертора соединен с входами одиннадцатого блока задания жесткостных характеристик л четвертого инвертора, выход которого соединен с входом
седьмого блока задания жесткостных характеристик, выход пятого инвертора подключен к второму входу сумматора напряжений и к входам второго блока задания жесткостных характеристик и шестого инвертора, выход
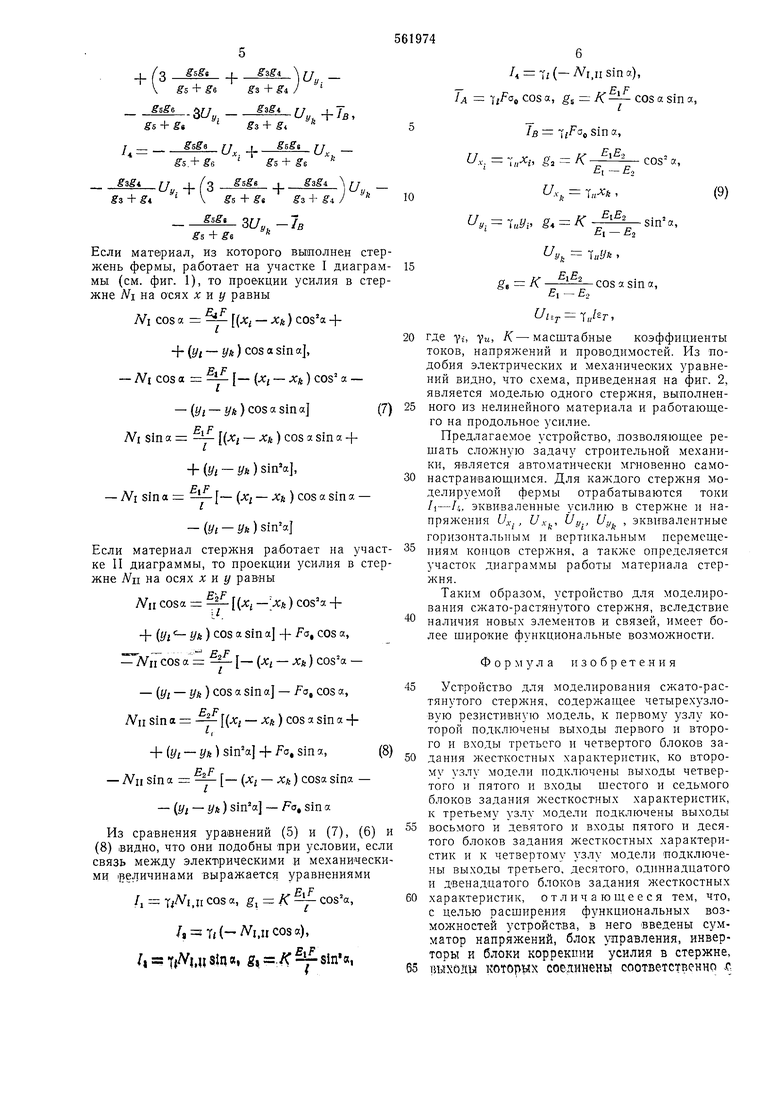
которого соединен с входами восьмого блока задания жесткостных характеристик, выход седьмого инвертора соединен с входами шестого блока задания жесткостных характеристик и восьмого инвертора, выход которого соединен с входом двенадцатого блока задания жесткостных характеристик, третий и четвертый входы сумматора напряжений соединены соответственно с вторым и четвертым узлами модели, а выход су.мматора напряжений подключен к первому входу блока управления, второй вход которого соединен с выходом источника напряжения. На фиг. 1 ло:казана -билинейная зависимость между напряжением и относительным удлинением стержчя из нелинейного Материала; на фиг. 2 - предлагаемое устройство. Расчет фермы, материал которой подчиняется билИНейному закону, представляет сложную задачу строительной механики, так как нельзя указать заранее, на каком из участков диаграммы (см. фиг. 1) работает в данный момент стержень фермы. Относительное удлинение наклонного .под углом ос к горизонту стержня ik ДЛ.ИНОЙ /, концы которого перемещаются ло горизонтали на величины Xi и л; и но вертикали - на величины г/, и ун, равНО E l{xt - Xk) cos a-f (Уг -УА) sin aj (1) Модуль i упругости материала равен , tgO, тогда , .(2) Напряжение о в материале на участке I и усилие в стержне тогда определяются по формулам , ,,(3) на участке ajl c.-f s.tgp, а, , Nn , + FziE, Устройство содержит блоки 1 -12 задания жесткостных характеристик стержня, при этом все блоки, кроме блоков 4 и 10, содержат последовательно соединенные проводимости gb и §6, а блоки 4 и 10 соответст венно- последовательно соединенные проводимости g, gz и ga, gi, блоки 13-16 коррекции усилия iB стержне; инверторы 17-24; сумматор напряжений 25; блок управления 26, на выходе которого включено реле 27, а второй вход соединен с источником напряжения 28 (), эквивалентного удлинению стержня /ег. Параллельно нроводимостям g&, gz, 4 всех :блоков задания жесткостных характеристик включены нормально замкнутые ключи реле .блока управления 26; блоки 13-16 содержат последовательно соединенные источник тока и нормально разомкнутый ключ реле блока управления 26; для инверторов 17, 20, 21 и 24- 3, а для инверторов 18, 19, Ro-сопротивление об22 -л 23 - 1, где AI ратной связи инвертора, R и Ri - входные сопротивления инверторов; в сумматоре отношение сопротивлений обратной связи го и входных связей ri и Г2 - соответственно для первого и третьего, второго и чет1вертого вхо sin a. cos a. дов paiBHbi Схемы, моделирующие один стержень (см. иг. 2), соединяются между собой по геометической схеме фермы для реализации уравений равновесия в узлах (суммы проекций силий на вертикальную и горизонтальную сь). Внешняя нагрузка, прикладываемая в злах фермы, моделируется источниками тоа, включаемыми в узлы, в которых эта нарузка приложена. После включения нагруочных источников тока происходит распрееление токов по электрической цепи так, что четырех узлах модели каждого стержня трабатываются напряжения / , 17,v.. , U. и if и токи /ь /2, /3 и /4. Если реле 27 блока управления 26 не сраатывает, то схема (см. фиг. 2) определяется равнениями электрического тока f. (Зз. + ё.) и.. - g,u, - g,yj. + + . - ,, / - g., + (Зя. + я,) ., - g.3, - ,,,. + , /, g.iJ., - eJJ. + (, + g,) Uy. - , - g,U,j, 4 -g... + g,U. - gJU. + + (S.+g.Uy-g,U, Если реле 27 |блока управления 26 срабатывает, что это соответствует случаю, когда напряжение, равное U , на выходе сумматора 25 становится большим, чем напряжение, равное источника 28. Диоды и источник наоряжения ЕОП являются элементами схемы ограничения, которая служит для предохранения обмотки реле от перегрузок. После срабатывания реле 27 открываются нормально замкнутые ключи блоков 1 -12 и закрываются нормально открытые ключи блоков 13-16, и схема, приведенная на фиг. 2, определяется уравнениями электрического тока. Ssge , gigz /:- 3 1 gsg 3.,+ gb + g6 ,+TA, gs + g f/.v,.+ 3 6 + « 5 + 3U. xu.,u,. -I -Isg, ..... .+gs + -+gsgeIg3g4...+ 3 Если материал, из которого выполнен жень фермы, работает на участке I ди мы (см. фиг. 1), то проекции усилия в жне NI на осях X и у равны NI cos я (Xf - Xk ) COSa -f + (уI - УЧ ) COS a sin a, - cos a -i- {- (Xi - Xk ) cos a - (У1 - yk ) COS a Sin NI sin ot 1 -J- (Xi - Xk ) cos a sin a -f + (У1 - yk } Sinaj, - NI sin a : -- - {Xi - Xk ) COS a sin я - (уI - yk Sina Если материал стержня работает на ке II диаграммы, то проекции усилия в жне на осях лиг/ равны COSa (Xi - Xk ) COSя -f + (yt yk ) COS a Sin я + fa, COS a, :t ry r Nil cos a - - (JC; - Xk ) COSa - (yi - yk ) COS a Sin a - Fc, COS я, ,1 sin a - (Xf - Xk ) COS я sin a + f + (г/г - yk ) sina + f 0, sin я, - sin я - (Xi - Xk ) СОЗя Sina - (У - yk) sino - f o, sin я Из сравнения уравнений (5) и (7), (8) .видно, что они подобны при условии связь между электрическими и механи ми 1реличинами выражается уравнения if /, : fiNiji COS я, g - /С -1- /1 Т((.иС08я), /.s-ri VuiSlqa, g,:/C sin«, Л Тг(.nsina), /л liFoy cos a, gs K- COS a. sin a, /B sin a. .v; . gs К .v иу.1иУ1 §4 К , - 2 y Т«Уй . y, K-COSa sin а, ,, где уг, YU, А -масштабные коэффициенты токов, напрял-;ений и нроводимостей. Из подобия электрических и механических уравнений видно, что схема, приведенная на фиг. 2, является моделью одного стержня, выполненноге из нелинейного материала и работающего на продольное усилие. Предлагаемое устройство, позволяющее рещать сложную задачу строительной механики, является автоматически мгновенно самонастраивающимся. Для каждого стержня моделируемой фермы отрабатываются токи /1-/4, эквнваленные усилию в стержне и напрялсения U,f., f.v, , Uy , эквивалентные горизонтальным и вертикальным перемещениям концов стержня, а также онределяется участок диаграммы работы материала стержня. Таким образом, устройство для моделирования сжато-растянутого стержня, вследствие наличия новых элементов и связей, имеет более широкие функциональные возможности. Формула изобретения Устройство для моделирования сжато-растянутого стержня, содержащее четырехузловую резистиеную модель, к первому узлу которой подключены выходы первого и второго и входы третьего и четвертого блоков заДания жест-костных характеристик, ко второму узлу модели подключены выходы четвертого и пятого и входы шестого и седьмого блоков задания жесткостных характеристик, к третьему узлу модели подключены выходы восьмого и девятого и входы пятого и десятого блоков задания жесткостных характеристик и к четвертому узлу модели подключены выходы третьего, десятого, одиннадцатого и двенадцатого блоков задания жесткостных характеристик, отличающееся тем, что, с целью расширения функциональных возможностей устройства, в него введены сумматор напряжений, блок управления, инверторы и блоки коррекции усилия в стержне, пыходы которых соединены соответственчо .с первым, вторым, третьим и четвертым узлами модели, а входы соединены с шююй нулевого иотенциала, к каждому из четырех узлов модели подключены входы инверторов, причем выход первого инвертора соединен с первым входом сумматора напряжений и с входами девятого блока задания жесткостных характеристик и второго инвертора, выход которого соединен с входом первого блока задания жесткостных характериетвк, выход третьего инвертора соединен с входами одиннадцатого блока задания жесткостных характеристик и четвертого инвертора, выход которого соединен с входом седьмого блока задания жесткостных характеристик, выход пятого инвертора подключен к второму входу сумматора папряжений и к входам второго блока задания жесткостных ха1рактеристик и шестого инвертора, выход которого соединен с входами восьмого блока задания жееткостных характеристик, выход седьмого инвертора соединен с входами 1нестого блока задания жесткостных характеристик, и восьмого инвертора, выход которого соединен с входом ;и;с1 аднатого блока задания жесткостных характеристик, третий и четвертый входы сумматора напряжений соединены соответственi:o с вторым и четвертым узлами модели, а выход сумматора напряжений подключен к HepiBOMy входу блока управления, второй вход которого соединен с выходом источника напряжения. Источники информации, принятые во внимание при экспертизе 1. Пухов Г. Е., В. В. Васильев, А. Е. Степанов и О. Н. Токарева. Электрическое моделирование задач строительной механики. Киев, изд-во АН УССР, 1963, с. 255. 2. Авторское свидетельство СССР № 438022, М. Кл.2 G 06G 7/46, 1972.
fuzA

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для стабилизации частоты вращения электродвигателя | 1989 |
|
SU1686681A1 |
| УСТРОЙСТВО И СПОСОБ ДЕМОДУЛЯЦИИ В СИСТЕМЕ СВЯЗИ, ИСПОЛЬЗУЮЩЕЙ МОДУЛЯЦИЮ 8-РИЧНОЙ ФАЗОВОЙ МАНИПУЛЯЦИЕЙ | 2002 |
|
RU2253186C2 |
| Устройство для моделирования стержня | 1977 |
|
SU744651A1 |
| Устройство для моделирования стержня | 1977 |
|
SU746600A1 |
| Система стабилизации бурового судна | 1986 |
|
SU1360405A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ЧАСТОТЫ И ВРЕМЕННОЙ ЗАДЕРЖКИ РАДИОСИГНАЛА | 1992 |
|
RU2048683C1 |
| ГЕНЕРАТОР ДВУХФАЗНЫХ ГАРМОНИЧЕСКИХ СИГНАЛОВ | 2020 |
|
RU2737004C1 |
| Устройство для контурного управления промышленным роботом | 1984 |
|
SU1211691A1 |
| Устройство для управления манипулятором | 1984 |
|
SU1229728A1 |
| Электропривод переменного тока | 1986 |
|
SU1372578A1 |
f
L
CZH
0-4
иг.
